You might also like
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoFrom EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoNo ratings yet
- Osciloscópio Com ArduinoDocument21 pagesOsciloscópio Com ArduinoMatheus FelipeNo ratings yet
- Projeto Completo de Um Conversor 12Vcc e 10A Com A Topologia Half-BridgeDocument89 pagesProjeto Completo de Um Conversor 12Vcc e 10A Com A Topologia Half-BridgeJosé Augusto Coeve Florino100% (1)
- O Circuito Integrado 741Document6 pagesO Circuito Integrado 741Joao PedroNo ratings yet
- Partida Direta - Liga e Desliga Com Um Único BotãoDocument3 pagesPartida Direta - Liga e Desliga Com Um Único BotãocarloscaduNo ratings yet
- Tipos de Excitação de Motores de Corrente ContínuaDocument7 pagesTipos de Excitação de Motores de Corrente ContínuaDavid Angelo TalieriNo ratings yet
- Capacitores e IndutoresDocument37 pagesCapacitores e IndutoresesdrasrnNo ratings yet
- Programar Microcontroladores PIC16F62XDocument21 pagesProgramar Microcontroladores PIC16F62XTiago Caetano50% (2)
- Relatorio 1 - Retificadores Monofásicos Não ControladosDocument19 pagesRelatorio 1 - Retificadores Monofásicos Não ControladosGustavo SousaNo ratings yet
- Acionamentos 2002 5 PDFDocument35 pagesAcionamentos 2002 5 PDFJarbasRezendeNo ratings yet
- Atividades Práticas CFW-11Document10 pagesAtividades Práticas CFW-11Ronaldo MajusteNo ratings yet
- Manual K30 v6.04Document60 pagesManual K30 v6.04Thiago CostaNo ratings yet
- Inversor de FreqüênciaDocument7 pagesInversor de FreqüênciaJordany SpaccaNo ratings yet
- Vintage 70 80 - CCE - 3 em 1Document25 pagesVintage 70 80 - CCE - 3 em 1Wagner CesarNo ratings yet
- Funções Ci 7404 7408 7432 7400Document21 pagesFunções Ci 7404 7408 7432 7400Franklin MirandaNo ratings yet
- Nas Questões A Seguir, Assinale Somente Uma Das AlternativasDocument8 pagesNas Questões A Seguir, Assinale Somente Uma Das AlternativassalimNo ratings yet
- Máquinas Elétricas RotativasDocument27 pagesMáquinas Elétricas Rotativaskfbovo100% (1)
- Carga de Gas Refrigerante PDFDocument24 pagesCarga de Gas Refrigerante PDFbrunocontiengenheiroNo ratings yet
- Física - Aula 15 - Gases PerfeitosDocument8 pagesFísica - Aula 15 - Gases PerfeitosFísica Concurso Vestibular100% (3)
- Circuito ComutadorDocument3 pagesCircuito ComutadorDaniel BonegesNo ratings yet
- Bloco M2-39 - CTA EletrônicaDocument39 pagesBloco M2-39 - CTA Eletrônicaatomo33No ratings yet
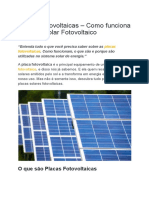
- Placas Fotovoltaicas - Como Funciona o Painel Solar FotovoltaicoDocument5 pagesPlacas Fotovoltaicas - Como Funciona o Painel Solar FotovoltaicoEnergyss - Energia SolarNo ratings yet
- TransistoresDocument31 pagesTransistoresPaulo Ricardo RibeiroNo ratings yet
- EscorregamentoDocument26 pagesEscorregamentoJunior NaturaNo ratings yet
- Apostila de Eletrônica Burgos ElectrônicaDocument4 pagesApostila de Eletrônica Burgos ElectrônicaJosé Rámon Oliveira PimentelNo ratings yet
- Antena para 80m e 40m Alimentada Com Linha Balanceada de 450 OhmDocument7 pagesAntena para 80m e 40m Alimentada Com Linha Balanceada de 450 Ohmmario_smateus100% (1)
- Sensor de NívelDocument21 pagesSensor de Nívelgerson21cardoso100% (2)
- Aula 12Document17 pagesAula 12Marco AntonioNo ratings yet
- Levitador MagnéticoDocument22 pagesLevitador MagnéticoMaikon Lucian Lenz100% (2)
- Relatorio Ensaios MITDocument7 pagesRelatorio Ensaios MITSoray SilvaNo ratings yet
- Circuito HorizontalDocument5 pagesCircuito Horizontalapi-3800166100% (1)
- Nas Questões A Seguir, Assinale Somente Uma Das AlternativasDocument8 pagesNas Questões A Seguir, Assinale Somente Uma Das AlternativassalimNo ratings yet
- Frenagem Corrente de FoucaultDocument8 pagesFrenagem Corrente de FoucaultFred SilvaNo ratings yet
- Definição de Um Tronco de VLANDocument13 pagesDefinição de Um Tronco de VLANEllyn HeberNo ratings yet
- Fisexp 2 ApostilaDocument279 pagesFisexp 2 Apostilaluca100% (1)
- Partida CompensadoraDocument2 pagesPartida CompensadoraDanilo SobralNo ratings yet
- Apostila Motor Monofasico PDFDocument12 pagesApostila Motor Monofasico PDFRenatho Souza Oliveira100% (2)
- Bitwise Linguagem C - AVRDocument83 pagesBitwise Linguagem C - AVRRenata Mercadante Do NascimentoNo ratings yet
- Exercicios Lei de OhmDocument3 pagesExercicios Lei de OhmORGANDO neri de melo100% (1)
- Eletrônica Linear 1Document5 pagesEletrônica Linear 1Gabriel PlnhoNo ratings yet
- Aplicação Distancia-21-01Document2 pagesAplicação Distancia-21-01Solange Antonio Carlos100% (1)
- Linguagem Máquina ExercíciosDocument34 pagesLinguagem Máquina ExercíciosCarla BarbosaNo ratings yet
- 01 Função de TransferênciaDocument8 pages01 Função de TransferênciaAntonio Batista100% (1)
- Arduino - Comunicacao Serial PDFDocument14 pagesArduino - Comunicacao Serial PDFt8823pcNo ratings yet
- Transistores PDFDocument115 pagesTransistores PDFfrederricharNo ratings yet
- Relatório 2 PARTIDA COMPENSADORAintrodução KleberDocument6 pagesRelatório 2 PARTIDA COMPENSADORAintrodução KleberSaulo Câmara100% (2)
- Manual Instalação DRDocument2 pagesManual Instalação DResmaelflores100% (1)
- Conversores TirstorizadosDocument22 pagesConversores TirstorizadosLeonardoViniciusNo ratings yet
- Aula 02 - Geradores ElementaresDocument15 pagesAula 02 - Geradores ElementaresWéverton V Moraes RNo ratings yet
- Cabral e Toledo - Interruptor Eletronico Controlado Por Palmas - 2010Document66 pagesCabral e Toledo - Interruptor Eletronico Controlado Por Palmas - 2010pedro_cabral_br100% (2)
- ESQUEMAS DE REFRIGERAÇÃO - Instalações de Refrigeração Comercial e IndustrialDocument20 pagesESQUEMAS DE REFRIGERAÇÃO - Instalações de Refrigeração Comercial e IndustrialLuiz eduardo moreira100% (1)
- Tiristores. 1. Aspectos Gerais 2. SCR 3. Curva Do SCR 4. DIAC 5. TRIAC 6. Curva Do TRIAC 7. Circuitos e Aplicações 8. Referências. 1.Document10 pagesTiristores. 1. Aspectos Gerais 2. SCR 3. Curva Do SCR 4. DIAC 5. TRIAC 6. Curva Do TRIAC 7. Circuitos e Aplicações 8. Referências. 1.AlexandreNo ratings yet
- Conceitos Basicos Sobre Capacitores e IndutoresDocument6 pagesConceitos Basicos Sobre Capacitores e IndutoresJeffer Vivendo A VidaNo ratings yet
- Procuração Modelo - Energia Solar - Cadastro DistribuidoraDocument1 pageProcuração Modelo - Energia Solar - Cadastro DistribuidoraSérgio Ferreira100% (4)
- VolareWeb Acesso Via Expert LoginDocument4 pagesVolareWeb Acesso Via Expert LoginSérgio FerreiraNo ratings yet
- Contrato de Prestacao de Servico de Instalacao de InternetDocument3 pagesContrato de Prestacao de Servico de Instalacao de InternetRodolfo RodrigoNo ratings yet
- Tabela EmlurbDocument119 pagesTabela Emlurbgildenilsonmagalhaes38% (8)
- Apostila PCHDocument1 pageApostila PCHSérgio FerreiraNo ratings yet
- Apresentação ADMDocument4 pagesApresentação ADMSérgio FerreiraNo ratings yet
- TRABALHO GRUPO 6 Administração Obtenção e Recebimento 2014.1Document28 pagesTRABALHO GRUPO 6 Administração Obtenção e Recebimento 2014.1Sérgio FerreiraNo ratings yet
- Gabarito Transpetro Nível Superior 15 Abril 2018 PDFDocument12 pagesGabarito Transpetro Nível Superior 15 Abril 2018 PDFSérgio FerreiraNo ratings yet
- Análise Do Desempenho de Sistemas de Transmissão CA Com Múltiplos Compensadores EstáticosDocument9 pagesAnálise Do Desempenho de Sistemas de Transmissão CA Com Múltiplos Compensadores EstáticosSérgio FerreiraNo ratings yet
- Instalacoes Eletricas 1 PDFDocument85 pagesInstalacoes Eletricas 1 PDFJéssica RibeiroNo ratings yet
- ENG04482 Aula 07 SimbologiaDocument77 pagesENG04482 Aula 07 SimbologiaNuno HenriquesNo ratings yet
- Capítulo Vi Transformadores em Áreas ClassificadasDocument2 pagesCapítulo Vi Transformadores em Áreas ClassificadasJOSE100% (1)
- 2019 Lista de Publicacao - 01 A 30 SetDocument8 pages2019 Lista de Publicacao - 01 A 30 SetMoninha123No ratings yet
- Transformadores - Perdas No Cobre e No Ferro PDFDocument0 pagesTransformadores - Perdas No Cobre e No Ferro PDFlucio8818No ratings yet
- Ppgee 3143Document5 pagesPpgee 3143PeterParkerNo ratings yet
- Exercício Revisão para 3 AnoDocument43 pagesExercício Revisão para 3 AnoEduardo MonteiroNo ratings yet
- Teleproteção Via Carrier em Cabos de Alta Tensão Enterrados1Document12 pagesTeleproteção Via Carrier em Cabos de Alta Tensão Enterrados1Fábio Henrique de Souza DuzNo ratings yet
- Calculo Indutancia Mutua e Propria MotoresDocument2 pagesCalculo Indutancia Mutua e Propria MotoresPedro JacquesNo ratings yet
- Procedimento Experimental para Partida Com Chave CompensadoraDocument5 pagesProcedimento Experimental para Partida Com Chave Compensadoraarhon berdichNo ratings yet
- 00 - Resumo Da AulaDocument48 pages00 - Resumo Da AulaCarlyson SilvaNo ratings yet
- Senai Modulo-1 Eletrica Predial PDFDocument8 pagesSenai Modulo-1 Eletrica Predial PDFLucas NevesNo ratings yet
- Aula 02 - Modulo 1Document86 pagesAula 02 - Modulo 1Thiago Costa MirandaNo ratings yet
- PDF Folheto de Exercicios de Fee - CompressDocument12 pagesPDF Folheto de Exercicios de Fee - CompressJulio BarrosNo ratings yet
- NT.002.EQTL .Normas e Qualidade - Fornecimento de Energia Eletrica em Media Tensao - 13-8KV - 23-1KV - 34-5KVDocument216 pagesNT.002.EQTL .Normas e Qualidade - Fornecimento de Energia Eletrica em Media Tensao - 13-8KV - 23-1KV - 34-5KVDouglasNo ratings yet
- Lista de Exercícios - 2Document4 pagesLista de Exercícios - 2Paulo Sergio DalviNo ratings yet
- TransformadoresDocument155 pagesTransformadoresDaniel GadêNo ratings yet
- ONS - Indicadores de Desempenho-Submódulo 25.8 - Rev - 1.1Document30 pagesONS - Indicadores de Desempenho-Submódulo 25.8 - Rev - 1.1Robson SantosNo ratings yet
- MEMORIAL-DESCRITIVO-Projeto Elétrico.Document46 pagesMEMORIAL-DESCRITIVO-Projeto Elétrico.Luís Paulo Cardoso100% (5)
- Laudo IsolamentoDocument15 pagesLaudo Isolamentob7412369No ratings yet
- TPU TC420 - Ed1 - PT (1.3)Document22 pagesTPU TC420 - Ed1 - PT (1.3)chupzptNo ratings yet
- Tecnico em EletrotecnicaDocument12 pagesTecnico em EletrotecnicaYabuki ShingoNo ratings yet
- NBR 6546 TB 19-21-1991 - Transformadores para InstrumentosDocument8 pagesNBR 6546 TB 19-21-1991 - Transformadores para InstrumentosNelson Jacob Rech JuniorNo ratings yet
- III Harmonicos em Sistemas de PotenciaDocument46 pagesIII Harmonicos em Sistemas de PotenciaLucas MahmudNo ratings yet
- Lista Exercicios Eletromagnetismo 2008 2Document12 pagesLista Exercicios Eletromagnetismo 2008 2Daniel Fec FluNo ratings yet
- Aula 1 Elementos Da Proteção PDFDocument39 pagesAula 1 Elementos Da Proteção PDFEderson Zanchet100% (2)
- Prova para Eletricista Industrial - Sem RespostasDocument6 pagesProva para Eletricista Industrial - Sem RespostasJadson CostaNo ratings yet
- CE - ElectricianDocument123 pagesCE - Electriciansilviu0d0No ratings yet
- Livro Curto CircuitoDocument225 pagesLivro Curto CircuitoengsennaNo ratings yet
- Aonde São Aplicado IDR E DRM DPS DRDocument11 pagesAonde São Aplicado IDR E DRM DPS DRPedro AlvesNo ratings yet
- Histerese MagnéticaDocument3 pagesHisterese MagnéticaAndre Luiz AlvesNo ratings yet
- Blog Do Eletricista - Tabela para Descobrir A Bitola Do Fio (Cabos) A Ser Usado - PDFDocument4 pagesBlog Do Eletricista - Tabela para Descobrir A Bitola Do Fio (Cabos) A Ser Usado - PDFromeotangomikeNo ratings yet