You might also like
- Expansión Fourier Navier-StokesDocument8 pagesExpansión Fourier Navier-StokesFrancisco CastroNo ratings yet
- Ejercicios de Variable Compleja PDFDocument6 pagesEjercicios de Variable Compleja PDFalex240574No ratings yet
- Tarea 1Document6 pagesTarea 1Ricardo AlejosNo ratings yet
- El Tensor de DeformacionesDocument16 pagesEl Tensor de DeformacionesAMYNNXXXXNo ratings yet
- Cálculo TensorialDocument20 pagesCálculo TensorialHenry Chavez RojasNo ratings yet
- Lab Metodo de Biseccion PDFDocument7 pagesLab Metodo de Biseccion PDFCamilo Andres Mora SantiagoNo ratings yet
- Tarea 2Document4 pagesTarea 2Ricardo AlejosNo ratings yet
- Enteros Modulo MDocument17 pagesEnteros Modulo MPaul MansillaNo ratings yet
- Algunos Tensores de Segundo OrdenDocument19 pagesAlgunos Tensores de Segundo OrdenAMYNNXXXXNo ratings yet
- Proyecto ESTRUCTURAS HIPERESTATICAS I PARTE II2015Document4 pagesProyecto ESTRUCTURAS HIPERESTATICAS I PARTE II2015Caiguara Angel MiguelNo ratings yet
- SilaboDocument4 pagesSilaboJuan SamanamudNo ratings yet
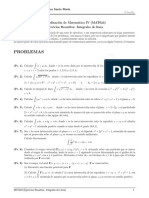
- Resueltos IntegralesDeLinea 12014Document32 pagesResueltos IntegralesDeLinea 12014Gabriel Alonso Olmedo AlvarezNo ratings yet
- Introducción Al Cálculo TensorialDocument15 pagesIntroducción Al Cálculo TensorialAraujo Thiago100% (1)
- Cálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosDocument29 pagesCálculo 3: SESIÓN 4: Integrales Dobles. Aplicaciones en Áreas de Regiones Planas y Volúmenes de SólidosAntonio Lunasco MendozaNo ratings yet
- Rcicios de Estructuras IsostáticasDocument5 pagesRcicios de Estructuras IsostáticasAlvaro CalamaniNo ratings yet
- 07-Notas de Clase-Carlos VargasDocument65 pages07-Notas de Clase-Carlos VargasJhonattan AlvarezNo ratings yet
- Ligaduras No Holonomas y Fuerzas de LigaduraDocument3 pagesLigaduras No Holonomas y Fuerzas de LigaduraGerman MiguelNo ratings yet
- Mecanica Cuantica Capitulo VII Complemento 2 Cohen-TannoudjiDocument10 pagesMecanica Cuantica Capitulo VII Complemento 2 Cohen-TannoudjiFrancisco TorresNo ratings yet
- Medidas ExterioresDocument10 pagesMedidas Exteriorespanickdiego100% (1)
- Euler PDFDocument7 pagesEuler PDFAnonymous 3N1ywmnNo ratings yet
- Concavidad y Convexidad Grupo 8Document8 pagesConcavidad y Convexidad Grupo 8Maycol RamirezNo ratings yet
- AJUSTESDocument11 pagesAJUSTESAna Gabriela AlbaNo ratings yet
- Tp1 2012 Problemas Resueltos-1Document6 pagesTp1 2012 Problemas Resueltos-1elpancasero77100% (1)
- Form Mat-313Document6 pagesForm Mat-313iran choque100% (1)
- Problemas Propuestos CinematicaDocument19 pagesProblemas Propuestos CinematicaHiroshi Alejandro Colonia Murata100% (1)
- Diseño de Zapatas CentricasDocument9 pagesDiseño de Zapatas CentricasZenaida Toledo MarcaNo ratings yet
- Ecuaciones DiferencialesDocument5 pagesEcuaciones DiferencialesAlex Wilfred Pumarrumi EscobarNo ratings yet
- Geometria VectorialDocument30 pagesGeometria VectorialLucas VenavidesNo ratings yet
- Flexion y CorteDocument16 pagesFlexion y CorteMiguel Angel Anarata TocoNo ratings yet
- Análisis MatemáticoDocument81 pagesAnálisis MatemáticoSekioz de NiafreNo ratings yet
- Harry Nara SolucionarioDocument2 pagesHarry Nara Solucionariofrank peñaloza0% (4)
- ExamenDocument5 pagesExamenJosue Paye ChipanaNo ratings yet
- Superficies Regulares Planos Tangentes y Normales-1Document21 pagesSuperficies Regulares Planos Tangentes y Normales-1edesmitNo ratings yet
- Mgne U2 A2Document1 pageMgne U2 A2Josuè Priego SanabriaNo ratings yet
- Silabo - Análisis de La Variable ComplejaDocument7 pagesSilabo - Análisis de La Variable ComplejaJohn Enrique Tinoco RojasNo ratings yet
- Los Cinco Estados de La Materia (Condensado de Bose - Einstein)Document11 pagesLos Cinco Estados de La Materia (Condensado de Bose - Einstein)Arturo Casas IINo ratings yet
- 02 Apuntes 18-19 CombinatoriaDocument31 pages02 Apuntes 18-19 CombinatoriaynfyNo ratings yet
- Producto TensorialDocument5 pagesProducto Tensorialrogelio825No ratings yet
- Ejercicios Resueltos Introducción Al Calculo TensorialDocument90 pagesEjercicios Resueltos Introducción Al Calculo TensorialKAGGHGNo ratings yet
- Tensor EsfuerzosDocument15 pagesTensor EsfuerzosDiego Castillo JaramilloNo ratings yet
- Apuntes Sobre Estructuras IsostáticasDocument1,772 pagesApuntes Sobre Estructuras IsostáticasjocksanNo ratings yet
- Primer Parcial de MAT 313 I 2021 G1 G2Document1 pagePrimer Parcial de MAT 313 I 2021 G1 G2Cisneros Armata Edwin WillyNo ratings yet
- Introduccion Al Analisis Convexo - Pedro GajardoDocument37 pagesIntroduccion Al Analisis Convexo - Pedro GajardoJuancarlosNo ratings yet
- Apuntes de FuncionesDocument11 pagesApuntes de FuncionesStephanie Rojas CancinoNo ratings yet
- Geometrıa ComputacionalDocument17 pagesGeometrıa ComputacionalAmIn20122No ratings yet
- Mapeos Variable ComplejaDocument4 pagesMapeos Variable ComplejaYerson VelandiaNo ratings yet
- Clase Nº9, Resolucion Practica Nº3Document5 pagesClase Nº9, Resolucion Practica Nº3Mario EstradaEspinozaNo ratings yet
- Vectores y TensoresDocument13 pagesVectores y Tensoresjackman_123No ratings yet
- Ecuaciones DiferencialesDocument39 pagesEcuaciones DiferencialesHector TineoNo ratings yet
- Resolución de Ejercicios Propuestos Harry Nara EstáticaDocument11 pagesResolución de Ejercicios Propuestos Harry Nara EstáticaAna Cristina Villalba100% (3)
- Movimiento Vibratorio AmortiguadoDocument4 pagesMovimiento Vibratorio AmortiguadoLuiz F Alarcon RojasNo ratings yet
- AE+1+Metodo de Cuarta Integración 13 AGODocument23 pagesAE+1+Metodo de Cuarta Integración 13 AGOAbel BenegasNo ratings yet
- Teorema de La Divergencia - MaxwellDocument9 pagesTeorema de La Divergencia - Maxwellpruebamaquinas123No ratings yet
- Vector EsDocument18 pagesVector EsPAUL JHERSON CARCAHUSTO TUMBILLONo ratings yet
- Tarea Examen - 1 Din Amica de Medios Deformables - Semestre 2021-1Document11 pagesTarea Examen - 1 Din Amica de Medios Deformables - Semestre 2021-1Lex GonzálezNo ratings yet
- Lineal 1 45Document45 pagesLineal 1 45Fernando HernándezNo ratings yet
- Descomposición de Vectores - Grupo 5Document6 pagesDescomposición de Vectores - Grupo 5MARCO MANZANEDANo ratings yet
- Representacion Matricial y Valores PropiosDocument4 pagesRepresentacion Matricial y Valores PropiosGabriela María Zapata PintoNo ratings yet
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaFrom EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaNo ratings yet
- Sugerencias PDFDocument1 pageSugerencias PDFMiguel Mamani CastroNo ratings yet
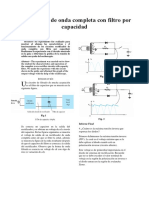
- Rectificador de Onda Completa Con Filtro Por Capacidad: Resumen-El Experimento Fue Realizado paraDocument2 pagesRectificador de Onda Completa Con Filtro Por Capacidad: Resumen-El Experimento Fue Realizado paraMiguel Mamani CastroNo ratings yet
- EE354 Sílabo - Análisis de Sistemas de Potencia II - 2020-I (Rev07-04.06.20-Mba)Document3 pagesEE354 Sílabo - Análisis de Sistemas de Potencia II - 2020-I (Rev07-04.06.20-Mba)Miguel Mamani CastroNo ratings yet
- Rectificador de Onda Completa Con Filtro LC: L LC, L 10LcDocument2 pagesRectificador de Onda Completa Con Filtro LC: L LC, L 10LcMiguel Mamani CastroNo ratings yet
- Guía de LaboratorioDocument37 pagesGuía de LaboratorioMiguel Mamani CastroNo ratings yet
- Angulo SolidoDocument47 pagesAngulo SolidoMiguel Mamani CastroNo ratings yet
- Coordenadas Curvilineas (Teoría y Ejercicios) SchaumDocument26 pagesCoordenadas Curvilineas (Teoría y Ejercicios) SchaumMiguel Mamani Castro100% (2)
- 5ta PC DesarrolladaDocument12 pages5ta PC DesarrolladaMiguel Mamani CastroNo ratings yet
- 5ta PC DesarrolladaDocument12 pages5ta PC DesarrolladaMiguel Mamani CastroNo ratings yet
- Word Teoria de BombasDocument22 pagesWord Teoria de BombasMiguel Mamani CastroNo ratings yet
- Informe Previo 7Document10 pagesInforme Previo 7Ronal HbNo ratings yet
- Incrustaciones de PorcelanaDocument3 pagesIncrustaciones de PorcelanaRocio AvilaNo ratings yet
- Electronica de PotenciaDocument448 pagesElectronica de PotenciaDario KlugNo ratings yet
- Plan de Gestion de InteresadosDocument8 pagesPlan de Gestion de InteresadosHelberth PereiraNo ratings yet
- Check List ExtintoresDocument1 pageCheck List ExtintoresAlexNo ratings yet
- Tarifa PTAR Sipe SipeDocument28 pagesTarifa PTAR Sipe SipeMiguel Angel Galvez TerrazasNo ratings yet
- Nitrogeno en PlatanoDocument5 pagesNitrogeno en Platanoapi-3772331100% (4)
- Formato de Verificación de Eficacia de Controles CríticosDocument4 pagesFormato de Verificación de Eficacia de Controles Críticosdiego jesusNo ratings yet
- Know AnsibleDocument55 pagesKnow AnsibleJuan Pablo Vargas AcostaNo ratings yet
- Cuestionario Fisica Examen FinalDocument2 pagesCuestionario Fisica Examen FinalYessenia RamosNo ratings yet
- Historia de Los Virus y Tipos de VacunasDocument5 pagesHistoria de Los Virus y Tipos de Vacunasaligusman100% (1)
- Resumen Diagrama de Recorrido Metodo PropuestoDocument1 pageResumen Diagrama de Recorrido Metodo PropuestoAdrianmBMLNo ratings yet
- Pec 1 2022 2023Document10 pagesPec 1 2022 2023FEDERICO JAVIER GARCIA BADORREYNo ratings yet
- Vlan ConfiguracionDocument10 pagesVlan ConfiguracionvaleriaNo ratings yet
- TangentesDocument6 pagesTangentesSAMUEL GILBER ORTIZ JAIMESNo ratings yet
- Resistencias Electricas TubularesDocument3 pagesResistencias Electricas TubularesAllan ColinaNo ratings yet
- Bloque 1 PDFDocument11 pagesBloque 1 PDFJose FlorezNo ratings yet
- Central Hidroelectrica Turbina Pellon Teorema de BernoulliDocument11 pagesCentral Hidroelectrica Turbina Pellon Teorema de BernoulliIoman PCNo ratings yet
- Agitadores y AcondicionadoresDocument11 pagesAgitadores y AcondicionadoresDelfinLeonHanccoNo ratings yet
- Asignación de Recursos Del GWD - Grupo 1Document5 pagesAsignación de Recursos Del GWD - Grupo 1RONNY DIAZNo ratings yet
- Secuencia de Control 1 Monoestable PDFDocument12 pagesSecuencia de Control 1 Monoestable PDFJose Maria Hernandez GarciaNo ratings yet
- TerraSync - Operation Guide - 240 - ESP PDFDocument607 pagesTerraSync - Operation Guide - 240 - ESP PDFandreazuvNo ratings yet
- Metodo Mapo PDFDocument10 pagesMetodo Mapo PDFAngelica Maria Garzon ForeroNo ratings yet
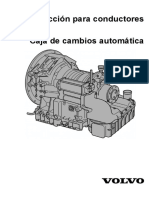
- Transmision ZFDocument22 pagesTransmision ZFMario Cortéz0% (1)
- Media Queries en CSSDocument7 pagesMedia Queries en CSSzoltak0% (1)
- 10-Cargas AxialesDocument40 pages10-Cargas AxialesEstefanía De SantiagoNo ratings yet
- 2 Atajado PDFDocument4 pages2 Atajado PDFCord Javi NicoNo ratings yet
- Informe de Laboratorio TriacDocument6 pagesInforme de Laboratorio TriacRicardo Soto100% (1)
- Equilibrio L-VDocument19 pagesEquilibrio L-VBlanca SalazarNo ratings yet
- Cotización Transp.Document3 pagesCotización Transp.Aldo Jhonatan Granda Portocarrero100% (2)