You might also like
- Practica 3Document4 pagesPractica 3Dan Pinto de LeonNo ratings yet
- Circuitos eléctricos: Leyes de Ohm y KirchhoffDocument10 pagesCircuitos eléctricos: Leyes de Ohm y Kirchhoffyuan raymond retamozo vilcaNo ratings yet
- Informe de Fisica 2Document5 pagesInforme de Fisica 2Liliana Marrugo ArteagaNo ratings yet
- Sistemas de refrigeración para drones médicosDocument19 pagesSistemas de refrigeración para drones médicosAnonymous LdulNXxSNo ratings yet
- Microscopía Electrónica de Barrido - Aplicaciones - FisiologíaDocument7 pagesMicroscopía Electrónica de Barrido - Aplicaciones - FisiologíaLa ChispaNo ratings yet
- Informe FresadoraDocument11 pagesInforme FresadoraPool Quispe Alcántara0% (1)
- Rectificador de Media Onda - JMRDocument24 pagesRectificador de Media Onda - JMRJOAQUINNo ratings yet
- I Examen - 2020BDocument2 pagesI Examen - 2020BJosep Brayan Loza100% (1)
- Laboratorio de Fisica N 8Document12 pagesLaboratorio de Fisica N 8Andres BermonNo ratings yet
- Medición de resistencias en laboratorioDocument11 pagesMedición de resistencias en laboratorioF1252100% (1)
- Pauta Certamen 2 - Ciencia de Los MaterialesDocument8 pagesPauta Certamen 2 - Ciencia de Los MaterialesMauricio CarrascoNo ratings yet
- Transductor FotorresistivosDocument20 pagesTransductor FotorresistivosSalvio Piña Sequera0% (1)
- Practica 1 Liquidos PenetrantesDocument12 pagesPractica 1 Liquidos Penetrantesricardo palomera100% (1)
- PotenciaDocument7 pagesPotenciaanyelo_08No ratings yet
- Unidad 2 Metodos No Convencionales.Document82 pagesUnidad 2 Metodos No Convencionales.mauricio espitiaNo ratings yet
- Labo 2 - Dispositivos Lineales y No LinealesDocument8 pagesLabo 2 - Dispositivos Lineales y No LinealesAlvaroNo ratings yet
- Labo 1 Ded Dispositivos ElectronicosDocument4 pagesLabo 1 Ded Dispositivos ElectronicosJJFRNo ratings yet
- Laboratorio 3 Diodo ZenerDocument12 pagesLaboratorio 3 Diodo ZenerMaria GomezNo ratings yet
- Decd 0471 PDFDocument327 pagesDecd 0471 PDFAna Isa BucioNo ratings yet
- Ensayo de JominyDocument12 pagesEnsayo de JominyRicardo Chavez CordovaNo ratings yet
- Practica 5Document7 pagesPractica 5DaLcNo ratings yet
- Ingeniería de Materiales Unidad 1Document21 pagesIngeniería de Materiales Unidad 1AlbertoNo ratings yet
- Laton 1Document4 pagesLaton 1Daniel Atoc GalarzaNo ratings yet
- Evaluacion DiagnosticaDocument6 pagesEvaluacion DiagnosticaJhon RojasNo ratings yet
- CUESTIONARIODocument4 pagesCUESTIONARIORonaldo GarzonNo ratings yet
- Problemario Unidad 2Document10 pagesProblemario Unidad 2G Jean Manuel Alexandroo0% (2)
- Estructura RomboedricaDocument10 pagesEstructura RomboedricaLuizSanchNo ratings yet
- Ensayo JominyDocument16 pagesEnsayo JominyEleana Marisol Surco QuispeNo ratings yet
- Determinacion de La Resistividad en Hilos Conductores CilindricosDocument25 pagesDeterminacion de La Resistividad en Hilos Conductores Cilindricoscarlos reyesNo ratings yet
- Detonación vs Deflagración: Diferencias entre procesos de combustión supersónica y subsónicaDocument67 pagesDetonación vs Deflagración: Diferencias entre procesos de combustión supersónica y subsónicaGabrielNo ratings yet
- Mecanizado No ConvencionalDocument5 pagesMecanizado No ConvencionalJosé MiguelNo ratings yet
- Visita planta fundición estaño ENAFDocument4 pagesVisita planta fundición estaño ENAFAlejandra FNo ratings yet
- Tarea #1 Ciencias Materiales LabDocument3 pagesTarea #1 Ciencias Materiales LabMaría Del Carmen Cedeño QuijadaNo ratings yet
- Taller 5 2021-2Document1 pageTaller 5 2021-2Yesika TamayoNo ratings yet
- Ejercicios ResueltosDocument6 pagesEjercicios ResueltosRicardo Saenz Vega100% (1)
- Informe N°1 Fisica III FIEE UNIDocument21 pagesInforme N°1 Fisica III FIEE UNIFernando de la CruzNo ratings yet
- Los Cristales Moleculares Tienen Enlaces Primarios Covalentes Entre Los Átomos Que Constituyen Las Moléculas y Enlaces Secundarios Entre EllasDocument3 pagesLos Cristales Moleculares Tienen Enlaces Primarios Covalentes Entre Los Átomos Que Constituyen Las Moléculas y Enlaces Secundarios Entre EllasCarlos QuispeNo ratings yet
- Mantenimiento 2Document47 pagesMantenimiento 2Robert Ruiz CernaNo ratings yet
- Pre Informe Osciladores Discretos Electronicos 1Document13 pagesPre Informe Osciladores Discretos Electronicos 1Piero BrionesNo ratings yet
- ROSCASDocument27 pagesROSCASJohn Acsel Galvis VelascoNo ratings yet
- Receptor FMDocument17 pagesReceptor FMteacirtro_777779991100% (1)
- Practica 1 Electricidad y Magnetismo IPNDocument12 pagesPractica 1 Electricidad y Magnetismo IPNJonathan OlarteNo ratings yet
- Friccion en CorreasDocument11 pagesFriccion en CorreasAbraham OchoaNo ratings yet
- Informe de MetalografiaDocument6 pagesInforme de MetalografiaSergio ToroNo ratings yet
- Materiales Metálicos - 1eros ParcialesDocument8 pagesMateriales Metálicos - 1eros ParcialesPedro_fuenzalida1990No ratings yet
- 1er Examen Parcial ELT - 2273 Electrotecnia AplicadaDocument1 page1er Examen Parcial ELT - 2273 Electrotecnia AplicadaAle TorrezNo ratings yet
- Practica 1 ElectrostaticaDocument4 pagesPractica 1 ElectrostaticajuanaNo ratings yet
- Informe Análoga - Práctica No 7Document3 pagesInforme Análoga - Práctica No 7Mateo Fonseca0% (1)
- Cap3b El Atomo Mecano-Cuantico y Sist Periodico Valido - 1Document70 pagesCap3b El Atomo Mecano-Cuantico y Sist Periodico Valido - 1VilelaGuevaraFiorellaNo ratings yet
- Lentes ElectromagnéticosDocument22 pagesLentes ElectromagnéticosRodolfo Rodriguez0% (1)
- Polaridad de Transformadores MonofasicosDocument11 pagesPolaridad de Transformadores MonofasicosMilagros YessicaNo ratings yet
- Laboratorio Sensores Reporte 9 TacometroDocument21 pagesLaboratorio Sensores Reporte 9 TacometroDillan TlNo ratings yet
- 8 AutoinducciónDocument2 pages8 AutoinducciónJuan Andres Graña Graña100% (2)
- Lab3 - Dureza, Doblado e ImpactoDocument6 pagesLab3 - Dureza, Doblado e ImpactoEsteban LSNo ratings yet
- Resistividad y Ley de Ohm Edison AndresDocument7 pagesResistividad y Ley de Ohm Edison AndresEdison GomezNo ratings yet
- Magnetism oDocument29 pagesMagnetism oEriorkys MajanoNo ratings yet
- Campo magnético inducidoDocument2 pagesCampo magnético inducidoGerardo Maldonado JaramilloNo ratings yet
- Aplicaciones electromagnetismoDocument10 pagesAplicaciones electromagnetismoMatias ChuquelNo ratings yet
- Electromagnetism oDocument5 pagesElectromagnetism oIsrael HerreraNo ratings yet
- Teoría electromagnética para estudiantes de ingeniería: Notas de claseFrom EverandTeoría electromagnética para estudiantes de ingeniería: Notas de claseRating: 4.5 out of 5 stars4.5/5 (7)
- 04624705a TFM PDFDocument120 pages04624705a TFM PDFRose Adeline100% (1)
- Ejercicios Resueltos SolidosDocument5 pagesEjercicios Resueltos SolidosEdwin R. Pumaricra Chauca0% (1)
- Ejemplo Basic o 1Document2 pagesEjemplo Basic o 1Edwin R. Pumaricra ChaucaNo ratings yet
- Seleccion de BombasDocument7 pagesSeleccion de BombasDaniloUnicahuinNavarroNo ratings yet
- Foro 4. Seguridad y Salud OcupacionalDocument2 pagesForo 4. Seguridad y Salud OcupacionalEdwin R. Pumaricra ChaucaNo ratings yet
- Cálculo de fuerza cortante y momento flexionante en vigasDocument21 pagesCálculo de fuerza cortante y momento flexionante en vigasCRMS137No ratings yet
- Seleccion de BombasDocument7 pagesSeleccion de BombasDaniloUnicahuinNavarroNo ratings yet
- El Caso de La FresadoraDocument9 pagesEl Caso de La FresadoraEdwin R. Pumaricra ChaucaNo ratings yet
- Modelo Diseño BombaDocument263 pagesModelo Diseño BombaEdwin R. Pumaricra ChaucaNo ratings yet
- Lab 1 Caso de Estudio PDFDocument1 pageLab 1 Caso de Estudio PDFEdwin R. Pumaricra ChaucaNo ratings yet
- Caso de Estudio Simuladores 2018 20Document6 pagesCaso de Estudio Simuladores 2018 20Edwin R. Pumaricra ChaucaNo ratings yet
- Cálculo de fuerza cortante y momento flexionante en vigasDocument21 pagesCálculo de fuerza cortante y momento flexionante en vigasCRMS137No ratings yet
- Semana 06 APADocument15 pagesSemana 06 APAEdwin R. Pumaricra ChaucaNo ratings yet
- Texto 02Document24 pagesTexto 02Johan RobertoNo ratings yet
- Ejercicio 9 RefrigeracionDocument2 pagesEjercicio 9 RefrigeracionEdwin R. Pumaricra ChaucaNo ratings yet
- Practica Ndeg 1 - Vectores 2D y 3DDocument2 pagesPractica Ndeg 1 - Vectores 2D y 3DEdwin R. Pumaricra Chauca0% (1)
- TAREA Nº13 - Diagrama de Fuerza Cortante y MomentoDocument2 pagesTAREA Nº13 - Diagrama de Fuerza Cortante y MomentoPCulqui Alain100% (1)
- Resistencia de materiales diagramas corte y momentoDocument5 pagesResistencia de materiales diagramas corte y momentoEdwin R. Pumaricra ChaucaNo ratings yet
- Actividad Grupal Nº5Document2 pagesActividad Grupal Nº5PCulqui AlainNo ratings yet
- ACTIVIDAD GRUPAL Nº5 - Análisis Estructural - Método de NodosDocument2 pagesACTIVIDAD GRUPAL Nº5 - Análisis Estructural - Método de NodosEdwin R. Pumaricra ChaucaNo ratings yet
- Texto 02Document24 pagesTexto 02Johan RobertoNo ratings yet
- ForoDocument1 pageForoEdwin R. Pumaricra ChaucaNo ratings yet
- Laboratorio n3 ElectronicaDocument15 pagesLaboratorio n3 ElectronicaEdwin R. Pumaricra ChaucaNo ratings yet
- ForoDocument1 pageForoEdwin R. Pumaricra ChaucaNo ratings yet
- Laboratorio n3 ElectronicaDocument15 pagesLaboratorio n3 ElectronicaEdwin R. Pumaricra ChaucaNo ratings yet
- Para EstudiarDocument6 pagesPara EstudiarEdwin Rafael Pumaricra ChaucaNo ratings yet
- Foundation FieldbusDocument4 pagesFoundation FieldbusJonnathan Paul Valdez SolisNo ratings yet
- Boletín Técnico FebreroDocument79 pagesBoletín Técnico FebreroJozz LtsNo ratings yet
- Tripticos Nuevos Productos WebDocument6 pagesTripticos Nuevos Productos WebHugo HernándezNo ratings yet
- Resumen de MetradosDocument3 pagesResumen de MetradosGNGuiNo ratings yet
- Valorización N°03Document31 pagesValorización N°03Yorbi Eber GrupocivilercNo ratings yet
- Sebastiano SerlioDocument24 pagesSebastiano SerlioWen Hernandez Madrigal100% (1)
- Cátedra Estructuras FLLDocument10 pagesCátedra Estructuras FLLWilber Sandoval CervantesNo ratings yet
- ViñolyDocument11 pagesViñolyErick ChavezNo ratings yet
- Instalación y programación de control termorreguladorDocument4 pagesInstalación y programación de control termorreguladorjsalinas7860% (15)
- Puente de Espagueti - EquipoDocument4 pagesPuente de Espagueti - Equipojavier torresNo ratings yet
- Especificaciones Tecnicas FinalDocument105 pagesEspecificaciones Tecnicas FinalAlexander Gonzales AlvaNo ratings yet
- Arte BizantinoDocument3 pagesArte BizantinoJhoselyn Tatiana Mantilla CórdovaNo ratings yet
- Electricas Fase 2 Martes 3 JulioDocument15 pagesElectricas Fase 2 Martes 3 JulioHector BrionesNo ratings yet
- Puentes: Universidad Tecnológica Nacional Facultad Regional CórdobaDocument108 pagesPuentes: Universidad Tecnológica Nacional Facultad Regional CórdobaJuan Cruz Elies OrtaNo ratings yet
- Historia OcultaDocument105 pagesHistoria OcultapumukiNo ratings yet
- Carpas o VelariasDocument23 pagesCarpas o Velariasmaricieloalisson100% (1)
- Papeles Biograficos PDFDocument160 pagesPapeles Biograficos PDFLila DiazNo ratings yet
- Caminando por la histórica Facatativá: recorriendo los lugares emblemáticos de esta ciudad prehispánicaDocument134 pagesCaminando por la histórica Facatativá: recorriendo los lugares emblemáticos de esta ciudad prehispánicajorge luis GonzalezNo ratings yet
- Informe Servicio de Guarderia Infantil para Programas FosisDocument17 pagesInforme Servicio de Guarderia Infantil para Programas FosisRuth Angélica Soto RiffoNo ratings yet
- Folleto Diseño BioclimáticoDocument6 pagesFolleto Diseño BioclimáticoMari AngelesNo ratings yet
- Simulación robot KUKA con KUKA.Sim ProDocument14 pagesSimulación robot KUKA con KUKA.Sim ProSebastianD.L.T.CastañedaNo ratings yet
- Ordenar y calcular números mediante funciones en CDocument5 pagesOrdenar y calcular números mediante funciones en CPaulina Araque100% (1)
- Aqm Web 8 0 Mui AEs La 1.7Document55 pagesAqm Web 8 0 Mui AEs La 1.7dangero2No ratings yet
- Interceramic presenta seis colecciones innovadoras de pisos y azulejosDocument86 pagesInterceramic presenta seis colecciones innovadoras de pisos y azulejossocialtrainerNo ratings yet
- Perfil de Conservacion y RestauracionDocument9 pagesPerfil de Conservacion y RestauracionYaquelin PizarroNo ratings yet
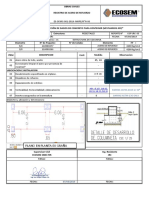
- Registro de acero de refuerzo para construcción de pedestales en JRCDocument1 pageRegistro de acero de refuerzo para construcción de pedestales en JRCvioletaNo ratings yet
- p160 01 (FIG16) PDFDocument2 pagesp160 01 (FIG16) PDFCarlos Rafael Pereyra SegoviaNo ratings yet
- Analisis Costos Unitarios Albergue CanesDocument27 pagesAnalisis Costos Unitarios Albergue CanesAngelnet007No ratings yet
- Recuperar ContraseñaDocument2 pagesRecuperar ContraseñaErnesto Ramirez0% (1)
- Proyecto Ermita 2Document23 pagesProyecto Ermita 2Rubens MijaresNo ratings yet