You might also like
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497Document7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497cristian1961No ratings yet
- Advanced Multilevel Converter Applied To An Open-Ends Induction MachineDocument8 pagesAdvanced Multilevel Converter Applied To An Open-Ends Induction MachineHieu VuNo ratings yet
- JournalDocument6 pagesJournaldzulkiNo ratings yet
- Optimization Phase-Locked Loop Circuits Via Geometric ProgrammingDocument4 pagesOptimization Phase-Locked Loop Circuits Via Geometric ProgrammingAlex WongNo ratings yet
- Modelling and Simulation of Sigma-Delta ADCs in VHDL-AMSDocument5 pagesModelling and Simulation of Sigma-Delta ADCs in VHDL-AMSVitu VituNo ratings yet
- Energy Conversion and Management: S.M. AithalDocument7 pagesEnergy Conversion and Management: S.M. AithalSravan KumarNo ratings yet
- Using High Accuracy Models To Achieve First Pass Design Success - A Transmitter Case Study - Part 2, Power Amplifier Design PDFDocument11 pagesUsing High Accuracy Models To Achieve First Pass Design Success - A Transmitter Case Study - Part 2, Power Amplifier Design PDFArun KumarNo ratings yet
- AnalogDocument8 pagesAnalogAhmed F RahimNo ratings yet
- Auto Transformer DesignDocument4 pagesAuto Transformer DesignJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- Electrical - Ijeeer - 16 - Cell Back-To-back - NaveenaDocument12 pagesElectrical - Ijeeer - 16 - Cell Back-To-back - NaveenaTJPRC PublicationsNo ratings yet
- CMOS Low-Power Analog Circuit DesignDocument55 pagesCMOS Low-Power Analog Circuit DesignRajesh_Nagaraj_9325No ratings yet
- Theory and Applications of IncrementalDocument13 pagesTheory and Applications of Incremental翁偉倫No ratings yet
- A Novel Tri-State Boost Converter With Fast DynamicsDocument7 pagesA Novel Tri-State Boost Converter With Fast DynamicsJie99No ratings yet
- Power Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsDocument7 pagesPower Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsNanda KumarNo ratings yet
- Systematic Design of A 200 MSs 8-Bit Interpolating AD ConverterDocument5 pagesSystematic Design of A 200 MSs 8-Bit Interpolating AD ConverterThanos van RamNo ratings yet
- Optimization of Partial Admission Stages for Improved Turbine PerformanceDocument6 pagesOptimization of Partial Admission Stages for Improved Turbine PerformancePratik Joshi100% (1)
- Design and Analysis of Single Phase Power Transformers For Undergraduate Engineering StudentsDocument11 pagesDesign and Analysis of Single Phase Power Transformers For Undergraduate Engineering StudentsAMMAD MAHMOODNo ratings yet
- Ansys ModelDocument11 pagesAnsys Modelsrini_meha100% (1)
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter ModelsDocument7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter ModelsIlona Dr. SmunczNo ratings yet
- Automatic Shape Optimization of Hydraulic Turbine Draft TubeDocument7 pagesAutomatic Shape Optimization of Hydraulic Turbine Draft TubeCarolina CuevasNo ratings yet
- IJIREEICE4C S Hiren Minimization-FinalDocument5 pagesIJIREEICE4C S Hiren Minimization-FinalirfanNo ratings yet
- Design Guidelines of CMOS Class-AB Output Stages - A Tutorial - Aloisi08Document15 pagesDesign Guidelines of CMOS Class-AB Output Stages - A Tutorial - Aloisi08Ashish Banga0% (1)
- Geometric Programming Based Power-Delay Optimization Using Transistor-Sizing For Submicron and Deep Submicron CMOS InverterDocument4 pagesGeometric Programming Based Power-Delay Optimization Using Transistor-Sizing For Submicron and Deep Submicron CMOS Invertersuchi87No ratings yet
- Sheel Type Transformer Design ProceduderDocument5 pagesSheel Type Transformer Design Procedudervrushabh bhiseNo ratings yet
- HFE0811 Ashok PDFDocument5 pagesHFE0811 Ashok PDFMichael BenhamouNo ratings yet
- Daniel Proj 1997 Transcond AmpDocument15 pagesDaniel Proj 1997 Transcond AmpIbrahim MuhammedNo ratings yet
- Automatic Control and Mathematical Models For Three Phase Transformer Using MATLABDocument6 pagesAutomatic Control and Mathematical Models For Three Phase Transformer Using MATLABApplied Science and Engineering Journal for Advanced ResearchNo ratings yet
- Design Power and Controller For DC-DC Converter Systems Using PSPICEDocument6 pagesDesign Power and Controller For DC-DC Converter Systems Using PSPICEsandeepbabu28No ratings yet
- Computer Aided Design and FE Analysis of A PM BLDG Hub MotorDocument6 pagesComputer Aided Design and FE Analysis of A PM BLDG Hub MotorDebarati DamNo ratings yet
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsAshok KumarNo ratings yet
- Design and Performance Analysis of a Low-Power Double-Tail ComparatorDocument5 pagesDesign and Performance Analysis of a Low-Power Double-Tail ComparatorSayantan RoyNo ratings yet
- PDFDocument26 pagesPDFramunitNo ratings yet
- Transmission Line Parameter CalculationDocument12 pagesTransmission Line Parameter Calculationksg9731100% (4)
- Designing a Differential Amplifier for Minimum Power ConsumptionDocument14 pagesDesigning a Differential Amplifier for Minimum Power ConsumptionSnehal PatilNo ratings yet
- Cmos Inverter As A ComparatorDocument5 pagesCmos Inverter As A ComparatorAnonymous TPVfFif6TONo ratings yet
- Application of Non-Linear Programming OpDocument9 pagesApplication of Non-Linear Programming OpDeepesh indurkarNo ratings yet
- Low Power-Area Designs of 1bit Full Adder in Cadence Virtuoso PlatformDocument10 pagesLow Power-Area Designs of 1bit Full Adder in Cadence Virtuoso PlatformAnonymous e4UpOQEPNo ratings yet
- Transformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationDocument4 pagesTransformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationOscar PieruzziniNo ratings yet
- A Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineDocument6 pagesA Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineHieu VuNo ratings yet
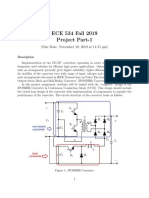
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- Cost-Optimal Design of A 3-Phase Core Type 3-Winding TransformerDocument4 pagesCost-Optimal Design of A 3-Phase Core Type 3-Winding TransformerHaider Addewany Abu HakemaNo ratings yet
- Core Loss by FEMDocument4 pagesCore Loss by FEMJayesh KothavadeNo ratings yet
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDocument12 pagesDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNo ratings yet
- Computer-Aided Design of a Core Type Power TransformerDocument26 pagesComputer-Aided Design of a Core Type Power TransformersellysaidiNo ratings yet
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsskrtamilNo ratings yet
- 06 Design Implementation Highly Efficient PDFDocument10 pages06 Design Implementation Highly Efficient PDFEdamEdamNo ratings yet
- ContentDocument6 pagesContentashwingeorge101No ratings yet
- Design and Analysis of Low Power Full Adder For Portable and Wearable ApplicationsDocument5 pagesDesign and Analysis of Low Power Full Adder For Portable and Wearable ApplicationsAshirbadKhuntiaNo ratings yet
- Folded Cascode OTA Design Using gm/ID MethodologyDocument6 pagesFolded Cascode OTA Design Using gm/ID MethodologyPramod SrinivasanNo ratings yet
- Analog Challenge of Nanometer CMOSDocument8 pagesAnalog Challenge of Nanometer CMOSurpublicNo ratings yet
- A Comparison of Three-Level Converters Versus Two-Level Converters For Low-Voltage Drives, Traction, and Utility ApplicationsDocument11 pagesA Comparison of Three-Level Converters Versus Two-Level Converters For Low-Voltage Drives, Traction, and Utility ApplicationsSoujanya SoujiNo ratings yet
- Investigating Switching TransformersDocument15 pagesInvestigating Switching TransformersMuhamad Afkar GumintangNo ratings yet
- Mca 11 00193 PDFDocument11 pagesMca 11 00193 PDFLuka NikitovicNo ratings yet
- Short Report - Optimal Design of A CMOS Op-Amp Via Geometric Programming - Mar Hershenson, Stephen Boyd, Thomas LeeDocument4 pagesShort Report - Optimal Design of A CMOS Op-Amp Via Geometric Programming - Mar Hershenson, Stephen Boyd, Thomas LeeMagnanil GoswamiNo ratings yet
- CFD and Low-Fidelity Model Optimization of Hypersonic Intake GeometryDocument12 pagesCFD and Low-Fidelity Model Optimization of Hypersonic Intake GeometryAhmad SalahNo ratings yet
- Designing and Optimizing Distribution Transformers Using MATLABDocument42 pagesDesigning and Optimizing Distribution Transformers Using MATLABMahidhar Talapaneni100% (4)
- Chap15 PDFDocument22 pagesChap15 PDFlighthouse2510No ratings yet
- Advanced low-power full-adder cell for low voltageDocument6 pagesAdvanced low-power full-adder cell for low voltagedurairajmary100% (1)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Power Flex 520-Series AC Dribe Specifitacions PDFDocument48 pagesPower Flex 520-Series AC Dribe Specifitacions PDFDrako HallNo ratings yet
- 1321 td001 - en PDocument28 pages1321 td001 - en PManoj ShahNo ratings yet
- Calculation For The Value of Stabilizing Resistor REF SettingDocument17 pagesCalculation For The Value of Stabilizing Resistor REF Setting1453hNo ratings yet
- Nema 2014WMS PDFDocument106 pagesNema 2014WMS PDFspidervinoNo ratings yet
- The Goal Achiever Workbook PDFDocument88 pagesThe Goal Achiever Workbook PDFvincraig100% (8)
- EPC Blueprint Sample Report Oct 2016Document69 pagesEPC Blueprint Sample Report Oct 2016Vivek AgarwalNo ratings yet
- CPC 100 MPD 600 Article Diagnostic Testing of Cast Resin Transformers 2018 ENUDocument13 pagesCPC 100 MPD 600 Article Diagnostic Testing of Cast Resin Transformers 2018 ENUManoj ShahNo ratings yet
- The Goal Achiever WorkbookDocument1 pageThe Goal Achiever WorkbookManoj ShahNo ratings yet
- SelectionDocument28 pagesSelectionManoj ShahNo ratings yet
- Designing of A Smart TransformerDocument4 pagesDesigning of A Smart TransformerManoj ShahNo ratings yet
- 37 PDFDocument11 pages37 PDFsiva anandNo ratings yet
- Multi-Step Lap Cores for Low Loss and NoiseDocument4 pagesMulti-Step Lap Cores for Low Loss and NoiseManoj ShahNo ratings yet
- Calculation of The Current Transformer Accuracy Limit FactorDocument14 pagesCalculation of The Current Transformer Accuracy Limit FactorWeiKiat Goh67% (3)
- Unit 4 Ee336Document31 pagesUnit 4 Ee336Satya Sudhakar RasamsettiNo ratings yet
- Acrux Three Phase Energy Meter PDFDocument12 pagesAcrux Three Phase Energy Meter PDFManoj Shah0% (1)
- Seven WastesDocument4 pagesSeven WastesManoj ShahNo ratings yet
- Ezct-2000b User Manual Rev 1.9Document120 pagesEzct-2000b User Manual Rev 1.9Manoj ShahNo ratings yet
- Spitzen BrochureDocument2 pagesSpitzen BrochureManoj ShahNo ratings yet
- Pewa 2018Document21 pagesPewa 2018Manoj Shah100% (1)
- Fronius 25kw EcoDocument2 pagesFronius 25kw Ecosehrish23No ratings yet
- Iberian+Solar+IBS72P+310w+315w+320w+325w+330w+Poly+72+cells V6.0aDocument2 pagesIberian+Solar+IBS72P+310w+315w+320w+325w+330w+Poly+72+cells V6.0aManoj ShahNo ratings yet
- ASC Plant Management - Land Power (UK)Document1 pageASC Plant Management - Land Power (UK)Manoj ShahNo ratings yet
- CGPAConversion Certificate PDFDocument1 pageCGPAConversion Certificate PDFManoj ShahNo ratings yet
- Ezct-2000b User Manual Rev 1.9Document120 pagesEzct-2000b User Manual Rev 1.9Manoj ShahNo ratings yet
- Hanwha Q Cells Data Sheet Qplus L g4.1 330-340 2016-09 Rev02 enDocument2 pagesHanwha Q Cells Data Sheet Qplus L g4.1 330-340 2016-09 Rev02 enManoj ShahNo ratings yet
- LR6 - 72Document2 pagesLR6 - 72Manoj ShahNo ratings yet
- Technical Data of HGQB-C Transformer CalibratorDocument3 pagesTechnical Data of HGQB-C Transformer CalibratorManoj ShahNo ratings yet
- MODIF Ingecon Sun 3play TLDocument4 pagesMODIF Ingecon Sun 3play TLManoj ShahNo ratings yet
- DTS PW 12-20 TL3 enDocument3 pagesDTS PW 12-20 TL3 enManoj ShahNo ratings yet
- Acceleration Methods: Aitken's MethodDocument5 pagesAcceleration Methods: Aitken's MethodOubelaid AdelNo ratings yet
- Computerweek 2016Document12 pagesComputerweek 2016api-320497288No ratings yet
- MathematicsDocument8 pagesMathematicsGeorge Isaac McQuilesNo ratings yet
- CAGD Notes SederbergDocument277 pagesCAGD Notes Sederbergshubham0012No ratings yet
- Laplace Transform C4 - StudentsDocument21 pagesLaplace Transform C4 - StudentsJing ZeNo ratings yet
- Maths Class X Chapter 05 Arithmetic Progression Practice Paper 05 AnswersDocument6 pagesMaths Class X Chapter 05 Arithmetic Progression Practice Paper 05 Answersal3bduNo ratings yet
- 3 (Part A)Document19 pages3 (Part A)Eng LuhanNo ratings yet
- Identification of Individual Types of Harmonic Loads in An Electric Power System BusDocument4 pagesIdentification of Individual Types of Harmonic Loads in An Electric Power System BusTarak BenslimaneNo ratings yet
- MindTap - Chapter7-18Document7 pagesMindTap - Chapter7-18Estefania FigueroaNo ratings yet
- Sgems Quinta Parte Del MAnual para Uso GeoestadisticoDocument27 pagesSgems Quinta Parte Del MAnual para Uso GeoestadisticoMileedy Vanessa Narro LucanoNo ratings yet
- FEMDocument20 pagesFEMVishal DhimanNo ratings yet
- Specialist Mathematics: Marking SummaryDocument7 pagesSpecialist Mathematics: Marking SummaryPerson GainableNo ratings yet
- Part III BSCCAL2 Module 1 Limits and Continuity 2Document9 pagesPart III BSCCAL2 Module 1 Limits and Continuity 2Christine EvangelistaNo ratings yet
- Summative Test - Math 5Document3 pagesSummative Test - Math 5irine mojicaNo ratings yet
- Mat223 UTM Midterm UofTDocument7 pagesMat223 UTM Midterm UofTRevownSada100% (1)
- Criteria For Partial Differential Equations To Be Euler-Lagrange EquationsDocument15 pagesCriteria For Partial Differential Equations To Be Euler-Lagrange EquationsImam FauziNo ratings yet
- Mathematics Departement Faculty of Mathematics and Sciences State University of Medan 2018Document11 pagesMathematics Departement Faculty of Mathematics and Sciences State University of Medan 2018tira kristy paneNo ratings yet
- The Generalised Form of Liouville Dirichlet Integrals (In N-Dimensional SpacesDocument4 pagesThe Generalised Form of Liouville Dirichlet Integrals (In N-Dimensional SpacesInije EjiroNo ratings yet
- Braybrook College Student Report 2023 - Semester OneDocument11 pagesBraybrook College Student Report 2023 - Semester OnebeeNo ratings yet
- Difference Between DDA N BresenhamDocument2 pagesDifference Between DDA N BresenhamSamudra NagNo ratings yet
- 2nd Assessment Key MathDocument3 pages2nd Assessment Key MathLove LoveNo ratings yet
- Subject (Not in Sequence) Number of Questions/ Maximum Marks Time Duration (For All Four Parts)Document4 pagesSubject (Not in Sequence) Number of Questions/ Maximum Marks Time Duration (For All Four Parts)RAPETI SAI KUMAR (N160490)No ratings yet
- Infosys Mock Logical Prep InstaDocument5 pagesInfosys Mock Logical Prep InstaDevesh RaiNo ratings yet
- Band Theory and Bloch Theorem in Solid State PhysicsDocument8 pagesBand Theory and Bloch Theorem in Solid State PhysicsVicky VickyNo ratings yet
- Velez College Inc.: Course Outline Math in The Modern WorldDocument11 pagesVelez College Inc.: Course Outline Math in The Modern WorldNoneNo ratings yet
- C2 May 2006 Mark SchemeDocument4 pagesC2 May 2006 Mark SchemeaaoneNo ratings yet
- ISC 2016 Computer Science Theory: Recursive Function Dry RunDocument27 pagesISC 2016 Computer Science Theory: Recursive Function Dry RunAdit Sarkar0% (1)
- Muntinlupa Business High School math guide on fractionsDocument10 pagesMuntinlupa Business High School math guide on fractionsKissieNo ratings yet
- Learning Module No. 1 TOPIC: The Derivative of A Function Background Information For LearnersDocument5 pagesLearning Module No. 1 TOPIC: The Derivative of A Function Background Information For LearnersSam Ashley Dela CruzNo ratings yet