You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Course Material - AP - Antenna ArrayDocument34 pagesCourse Material - AP - Antenna ArrayVanidevi ManiNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Statistical MIMO RadarDocument34 pagesStatistical MIMO RadarVanidevi ManiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- FDP BrouchureDocument2 pagesFDP BrouchureVanidevi ManiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 12636/VAIGAI EXP Second Sitting (2S) : WL WLDocument2 pages12636/VAIGAI EXP Second Sitting (2S) : WL WLVanidevi ManiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- OTFS - Predictability in The Delay-Doppler Domain and Its Value To Communication and Radar SensingDocument18 pagesOTFS - Predictability in The Delay-Doppler Domain and Its Value To Communication and Radar SensingVanidevi ManiNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Pier B Vol-53 2013417-435Document20 pagesPier B Vol-53 2013417-435Vanidevi ManiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Sparse Parameter Estimation and Imaging in Mmwave MIMO Radar Systems With Multiple Stationary and Mobile TargetsDocument17 pagesSparse Parameter Estimation and Imaging in Mmwave MIMO Radar Systems With Multiple Stationary and Mobile TargetsVanidevi ManiNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Usrp 4Document6 pagesUsrp 4Vanidevi ManiNo ratings yet
- Orthogonal Frequency Division Multiplexing (OFDM) : Concept and System-ModelingDocument31 pagesOrthogonal Frequency Division Multiplexing (OFDM) : Concept and System-ModelingAsif_Iqbal_8466No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Arduino Based Snake Robot Controlled Using AndroidDocument3 pagesArduino Based Snake Robot Controlled Using AndroidVanidevi ManiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Women Safety Device With GPS TrackingDocument2 pagesWomen Safety Device With GPS TrackingVanidevi ManiNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Digital Communications: Chapter 12 Spread Spectrum Signals For Digital CommunicaitonsDocument89 pagesDigital Communications: Chapter 12 Spread Spectrum Signals For Digital CommunicaitonsVanidevi ManiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DTFS - TutorialDocument7 pagesDTFS - TutorialVanidevi ManiNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Brahim2015 PDFDocument12 pagesBrahim2015 PDFVanidevi ManiNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- For Digital Communication Over Dispersive Channels: Decision-Feedback EqualizationDocument102 pagesFor Digital Communication Over Dispersive Channels: Decision-Feedback EqualizationVanidevi ManiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- (AM/PM: Is ItDocument10 pages(AM/PM: Is ItVanidevi ManiNo ratings yet
- Tuning A Kalman Filter Carrier Tracking Algorithm in The Presence of Ionospheric ScintillationDocument12 pagesTuning A Kalman Filter Carrier Tracking Algorithm in The Presence of Ionospheric ScintillationVanidevi ManiNo ratings yet
- Uhf Radio Na Uhf g0 r6Document24 pagesUhf Radio Na Uhf g0 r6Vanidevi ManiNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Digital Communications: Chapter 13 Fading Channels I: Characterization and SignalingDocument118 pagesDigital Communications: Chapter 13 Fading Channels I: Characterization and SignalingVanidevi ManiNo ratings yet
- Verschaeve Design 2016Document149 pagesVerschaeve Design 2016Vanidevi ManiNo ratings yet
- Full RF Signal Chains From 0Hz To 110GHzDocument4 pagesFull RF Signal Chains From 0Hz To 110GHzVanidevi ManiNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Career Point: Pre-Foundation DivisionDocument18 pagesCareer Point: Pre-Foundation DivisionVanidevi Mani100% (1)
- Work and Energy QB PDFDocument18 pagesWork and Energy QB PDFVanidevi ManiNo ratings yet
- ECE 4670 Spring 2014 Lab 4 Radio Receivers For Analog and Digital ModulationDocument16 pagesECE 4670 Spring 2014 Lab 4 Radio Receivers For Analog and Digital ModulationVanidevi ManiNo ratings yet
- A GNU Radio Based Software-Defined RadarDocument126 pagesA GNU Radio Based Software-Defined RadarVanidevi ManiNo ratings yet
- Tour and Travel MidtermDocument7 pagesTour and Travel MidtermJulienne DumaelNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Air Regs HandbookDocument90 pagesAir Regs Handbookjitansh singhNo ratings yet
- Standard Operating Procedures FSLabs A320 PDFDocument49 pagesStandard Operating Procedures FSLabs A320 PDFNeeth100% (1)
- Airports and Airport SystemsDocument8 pagesAirports and Airport SystemsAnonymous zwnFXURJNo ratings yet
- Ksfoktus PDF 1686710157Document39 pagesKsfoktus PDF 1686710157Htay WinNo ratings yet
- Manual On Station Level Training For Acquiring Rating NEWDocument45 pagesManual On Station Level Training For Acquiring Rating NEWBiplav KumarNo ratings yet
- Atc and AirmanshipDocument26 pagesAtc and AirmanshipDevraj EyyaniNo ratings yet
- Non Radar APPDocument11 pagesNon Radar APPDũng NguyễnNo ratings yet
- Do You Know Your Atc Tcas PanelDocument5 pagesDo You Know Your Atc Tcas Panelmarroco13No ratings yet
- Aip Canada (Icao)Document8 pagesAip Canada (Icao)Tariq khosoNo ratings yet
- A Model For The Rapid Assessment of The Impact of Aviation Noise Near AirportsDocument16 pagesA Model For The Rapid Assessment of The Impact of Aviation Noise Near AirportsLi LiNo ratings yet
- WaddDocument31 pagesWaddBen FaizNo ratings yet
- TOBTDocument6 pagesTOBTjsesNo ratings yet
- Rahe-2m-With-Ans-16m-Q 3 - BY Civildatas - Blogspot.in PDFDocument15 pagesRahe-2m-With-Ans-16m-Q 3 - BY Civildatas - Blogspot.in PDFIjaz ahamed MNo ratings yet
- 1.1. ATIS 1.2. Rwy Operations 11.. Ggeenneerraall: 1.2.1. Preferential Rwy System 1.2.2. RWY USAGEDocument30 pages1.1. ATIS 1.2. Rwy Operations 11.. Ggeenneerraall: 1.2.1. Preferential Rwy System 1.2.2. RWY USAGEDiego PauloNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- WestWind Airlines A330-200FOMDocument140 pagesWestWind Airlines A330-200FOMCandace FrankNo ratings yet
- Briefing GRF 2021 NOV20 R1.4Document27 pagesBriefing GRF 2021 NOV20 R1.4Lima MikeNo ratings yet
- A1/A3 Syllabus Unmanned Aircraft Systems (Uas) Online TrainingDocument10 pagesA1/A3 Syllabus Unmanned Aircraft Systems (Uas) Online TrainingstavrischrNo ratings yet
- Pre Takeoff CheckDocument3 pagesPre Takeoff CheckMike AguirreNo ratings yet
- Gateway Agro Cargo Airport Presentation PDFDocument16 pagesGateway Agro Cargo Airport Presentation PDFSatish KapoorNo ratings yet
- Fuel (CFP & FMGS)Document1 pageFuel (CFP & FMGS)api-3805097100% (2)
- Air Navigation Regulation 1981 Updated 25.05.2016Document138 pagesAir Navigation Regulation 1981 Updated 25.05.2016Prayush ChettyNo ratings yet
- LSGG Apch4 Ils22Document1 pageLSGG Apch4 Ils22samykarim2009No ratings yet
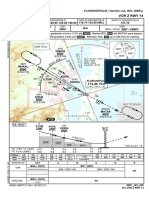
- SBFL Vor-Z-Rwy-14 Iac 20211202Document1 pageSBFL Vor-Z-Rwy-14 Iac 20211202Vinicius LinsNo ratings yet
- How To Talk To ATCDocument7 pagesHow To Talk To ATCFrancisco Javier OrellanaNo ratings yet
- Aar96 01 111219161022 Phpapp01Document336 pagesAar96 01 111219161022 Phpapp01Gabriel Tudorel Dedu100% (1)
- Amc 20-8 Subparte B PDFDocument14 pagesAmc 20-8 Subparte B PDFMartin FisherNo ratings yet
- Thunder of Heaven by Tim LaHaye & Craig Parshall, ExcerptDocument30 pagesThunder of Heaven by Tim LaHaye & Craig Parshall, ExcerptZondervan0% (1)
- Aero Syllabus 7Document5 pagesAero Syllabus 7ae00505No ratings yet
- Egaa/Bfs: 1.1. Atis 1.2. Noise Abatement Procedures 1. GeneralDocument24 pagesEgaa/Bfs: 1.1. Atis 1.2. Noise Abatement Procedures 1. GeneralTweed3ANo ratings yet
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (82)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)