You might also like
- Sesión 2 - Anualidades VencidasDocument25 pagesSesión 2 - Anualidades VencidasDiego FierroNo ratings yet
- Convenio de BudapestDocument3 pagesConvenio de BudapestLeón ColochNo ratings yet
- Charla Integral SSIMA 421 Manejo Defensivo en Condiciones Climatológicas AdversasDocument2 pagesCharla Integral SSIMA 421 Manejo Defensivo en Condiciones Climatológicas AdversasWalterLiviasNo ratings yet
- Informe de SilviaDocument42 pagesInforme de SilviaAnonymous uflnbN8SNo ratings yet
- Laboratorio 14 Adc-1Document6 pagesLaboratorio 14 Adc-1julio enriqueNo ratings yet
- LAB 12 - Medidores MiscelaneosDocument14 pagesLAB 12 - Medidores MiscelaneosJairo Colonia100% (1)
- Laboratorio 10 - Medición de FlujoDocument18 pagesLaboratorio 10 - Medición de FlujoJairo Colonia100% (1)
- Controladores Lógicos Programables de Control DiscretoDocument5 pagesControladores Lógicos Programables de Control DiscretoAndrea Jesus Quenta VillarrealNo ratings yet
- Lab08 ContDigConfDR20Document27 pagesLab08 ContDigConfDR20Feedy LopezNo ratings yet
- L12 Informe - Medidores MiscelaneosDocument14 pagesL12 Informe - Medidores MiscelaneosKoey SanchezNo ratings yet
- l01 Instrumentos Laboratorio 1Document10 pagesl01 Instrumentos Laboratorio 1Mariana NuñezNo ratings yet
- EcuacionesDiferenciales2doOrdenCircuitosRLCDocument7 pagesEcuacionesDiferenciales2doOrdenCircuitosRLCNocturnal BvNo ratings yet
- Lab02 CONFIGURACIONES - BASICASDocument9 pagesLab02 CONFIGURACIONES - BASICASPiero Emilio Alvarado CosiNo ratings yet
- Laboratorio 01 P&IDDocument5 pagesLaboratorio 01 P&IDHugo Roberto Junior Gutierrez ValentinNo ratings yet
- Laboratorio 07 - SensoresDocument12 pagesLaboratorio 07 - SensoresClinton Christian Chipana ParisuanaNo ratings yet
- FLORES y Lenin LABORATORIO.9Document6 pagesFLORES y Lenin LABORATORIO.9Anthony Flores CaysahuanaNo ratings yet
- Transformada de Laplace circuitos RLCDocument7 pagesTransformada de Laplace circuitos RLCYerson Yossimar Puma CcanaNo ratings yet
- Laboratorio 5 Circuitos ContadoresDocument3 pagesLaboratorio 5 Circuitos ContadoresDiego Flores100% (1)
- Flores y Espiritu - 04Document5 pagesFlores y Espiritu - 04Anthony Flores CaysahuanaNo ratings yet
- Lab 10 Diagnostico y Mantenimiento PLC SLC 5-04Document5 pagesLab 10 Diagnostico y Mantenimiento PLC SLC 5-04Diego Giancarlo Huertas AlvaroNo ratings yet
- Lab 5 Aplicaciones de La Integral Con MatlabDocument9 pagesLab 5 Aplicaciones de La Integral Con MatlabLucciano Alfredo Pena ButronNo ratings yet
- LABORATORIO 9 Circuito Integrador - 2021 - 1Document5 pagesLABORATORIO 9 Circuito Integrador - 2021 - 1Eduardo ArceNo ratings yet
- C16 - LABORATORIO 02 - Configuraciones Básicas - Parte IDocument8 pagesC16 - LABORATORIO 02 - Configuraciones Básicas - Parte IrinathanNo ratings yet
- Lab 10.. Válvula de DiafragmaDocument19 pagesLab 10.. Válvula de DiafragmaMartin Rudy Mogrovejo VasquezNo ratings yet
- Lab14 PalominoZavalaDocument19 pagesLab14 PalominoZavalajulio enriqueNo ratings yet
- Lab 04Document16 pagesLab 04Deybit LoaizaNo ratings yet
- Lab 12 Series de FourierDocument20 pagesLab 12 Series de FourierAymar Alexis Montoya VargasNo ratings yet
- l05 Derivadores Integradores 2018Document17 pagesl05 Derivadores Integradores 2018Gonzalo PereyraNo ratings yet
- Filtros Activos: Pasa Bajo y Pasa BandaDocument15 pagesFiltros Activos: Pasa Bajo y Pasa BandaIsrael Castillo OlayaNo ratings yet
- Lab 07Document10 pagesLab 07Draguz WaldoNo ratings yet
- Control térmico PIDDocument10 pagesControl térmico PIDroxanaNo ratings yet
- Taller N 14Document1 pageTaller N 14Eduardo MolleapazaNo ratings yet
- Lab 5 Aplicaciones de La Integral Con MatlabDocument5 pagesLab 5 Aplicaciones de La Integral Con MatlabAlexander Victor Esmith Ramos NinaNo ratings yet
- Amplificador de instrumentación y derivadorDocument5 pagesAmplificador de instrumentación y derivadorZach BrianNo ratings yet
- Lab 12-MatematicaDocument35 pagesLab 12-MatematicaAnthony Flores CaysahuanaNo ratings yet
- Lab14 Instrumentación IndustrialDocument20 pagesLab14 Instrumentación IndustrialAntoni Alfonso Chilon CabanillasNo ratings yet
- Lab 05 Subrutinas Con SLC 5-04Document15 pagesLab 05 Subrutinas Con SLC 5-04Alex ChuctayaNo ratings yet
- Lab02 MPlab y LenguajeProgramacionDocument22 pagesLab02 MPlab y LenguajeProgramacionAntoni Alfonso Chilon CabanillasNo ratings yet
- Lab 04 Bloques Funcionales IntegradosDocument16 pagesLab 04 Bloques Funcionales IntegradosRenzo MelendezNo ratings yet
- Lab 08 " (B) Tratamiento de Señales Analógicas" COMPACDocument9 pagesLab 08 " (B) Tratamiento de Señales Analógicas" COMPACAlberto Miguel Quispe LimaNo ratings yet
- Lab01 Uso de Instrumentos v2Document8 pagesLab01 Uso de Instrumentos v2Rafael Walter Elias Vera RamosNo ratings yet
- Lab 11 Proximidad1Document19 pagesLab 11 Proximidad1Rodrigo HerreraNo ratings yet
- 2 PRAC - Procesos y Control - 4C5 - 2023 - IDocument6 pages2 PRAC - Procesos y Control - 4C5 - 2023 - IJonathan Alvarado SilvaNo ratings yet
- LAB 09 - Sintonía Del Controlador Por El Método Del Tanteo - 4C16 - BDocument94 pagesLAB 09 - Sintonía Del Controlador Por El Método Del Tanteo - 4C16 - BTony Daniel López PalaciosNo ratings yet
- Lab 06 Programación e Implementación Del Aplicativo 1Document8 pagesLab 06 Programación e Implementación Del Aplicativo 1Clinton Christian Chipana ParisuanaNo ratings yet
- Lab 1 - Compuertas y Funciones LógicasDocument15 pagesLab 1 - Compuertas y Funciones LógicasRafael Walter Elias Vera RamosNo ratings yet
- LaboratorioDocument15 pagesLaboratorioAlexis AñamuroNo ratings yet
- Regresión lineal en ExcelDocument12 pagesRegresión lineal en ExcelJunior AlejoNo ratings yet
- Neumatica 5Document1 pageNeumatica 5diego dieguitoNo ratings yet
- 3 Labep2017-IiDocument7 pages3 Labep2017-IiJeffry Cr PaJar PonCe0% (1)
- Laboratorio 2 CytDocument16 pagesLaboratorio 2 CytJhordy BazanNo ratings yet
- Lab15 Diaz PonceDocument10 pagesLab15 Diaz PonceGwarguif Brusce Anthony Diaz EguizabalNo ratings yet
- Guía 7 Transmisores de Temperatura-1Document7 pagesGuía 7 Transmisores de Temperatura-1Enzo AlvaroNo ratings yet
- Laboratorio 08 Sensores Binarios de PresiónDocument14 pagesLaboratorio 08 Sensores Binarios de PresiónWilly Luque BautistaNo ratings yet
- Lab 14 DXD NdeahDocument15 pagesLab 14 DXD Ndeahdiego dieguitoNo ratings yet
- Laboratorio 4 PAMDocument10 pagesLaboratorio 4 PAMRomario Gonzales LeonNo ratings yet
- Lab N 7 Electronica DigitalDocument7 pagesLab N 7 Electronica DigitalSan Maycol FielNo ratings yet
- Aplicativo Cerradura CodificadaDocument9 pagesAplicativo Cerradura CodificadaHoshenson Rodrigo Diaz MamaniNo ratings yet
- Laboratorio #1Document10 pagesLaboratorio #1Dilman Alberto Ccotahuana HuarcaNo ratings yet
- Lab Oratorio 3Document8 pagesLab Oratorio 3Brando Nicolas Jimenez LugoNo ratings yet
- LAB 3 SIC NeumaticaIDocument7 pagesLAB 3 SIC NeumaticaInkNo ratings yet
- Lab01 Estrategiasdecontrol C5 5C VARGASDocument10 pagesLab01 Estrategiasdecontrol C5 5C VARGASAlvaro Vargas GonzalesNo ratings yet
- Configuración SIPART DR20Document8 pagesConfiguración SIPART DR20Arturo TapiaNo ratings yet
- Control PIDDocument17 pagesControl PIDJosé Hein100% (1)
- Ejercicio Simplex MaximizarDocument3 pagesEjercicio Simplex MaximizarAlvaro Vargas GonzalesNo ratings yet
- Ejercicios - Metodo SimplexDocument63 pagesEjercicios - Metodo SimplexAlvaro Vargas GonzalesNo ratings yet
- Guía de cronometraje industrial con 3 casos de estudio para determinar tiempos estándarDocument2 pagesGuía de cronometraje industrial con 3 casos de estudio para determinar tiempos estándarAlvaro Vargas GonzalesNo ratings yet
- TF - Tecnología de Materiales y Manufactura - W71a - Grupo 8Document38 pagesTF - Tecnología de Materiales y Manufactura - W71a - Grupo 8Alvaro Vargas GonzalesNo ratings yet
- Ejercicio Simplex MaximizarDocument3 pagesEjercicio Simplex MaximizarAlvaro Vargas GonzalesNo ratings yet
- Informe Delta VDocument7 pagesInforme Delta VAlvaro Vargas GonzalesNo ratings yet
- Ejercicio Simplex MinimizarDocument3 pagesEjercicio Simplex MinimizarAlvaro Vargas GonzalesNo ratings yet
- Problema A Resolver Grupo 5Document19 pagesProblema A Resolver Grupo 5Alvaro Vargas GonzalesNo ratings yet
- Ejercicio Simplex MaximizarDocument3 pagesEjercicio Simplex MaximizarAlvaro Vargas GonzalesNo ratings yet
- Diapos Ingenieria Met.Document19 pagesDiapos Ingenieria Met.Alvaro Vargas GonzalesNo ratings yet
- Caso Fabrica de Chocolates PDFDocument6 pagesCaso Fabrica de Chocolates PDFJimmy VMNo ratings yet
- Mapa de Procesos CITIBANKDocument3 pagesMapa de Procesos CITIBANKAlvaro Vargas GonzalesNo ratings yet
- Avance 1-Pt-EDocument5 pagesAvance 1-Pt-EAlvaro Vargas GonzalesNo ratings yet
- Ejericicio 1 Ing EconomicaDocument1 pageEjericicio 1 Ing EconomicaAlvaro Vargas GonzalesNo ratings yet
- GRUPO 8 - Actividad 2. Casos Sobre Materiales y Recursos de FundiciónDocument7 pagesGRUPO 8 - Actividad 2. Casos Sobre Materiales y Recursos de FundiciónCarlos Muñoz vitorNo ratings yet
- Implementación de un Gateway IoT para monitoreo industrial con Node-REDDocument6 pagesImplementación de un Gateway IoT para monitoreo industrial con Node-REDAlvaro Vargas GonzalesNo ratings yet
- Actividad 3. Casos Sobre Materiales y Recursos de Conformado de MetalesDocument9 pagesActividad 3. Casos Sobre Materiales y Recursos de Conformado de MetalesBrayan MartinezNo ratings yet
- Tarea 1 Ing - Procesos EPE-22-1B-GRUPO8Document4 pagesTarea 1 Ing - Procesos EPE-22-1B-GRUPO8Alvaro Vargas GonzalesNo ratings yet
- Ejercicio Cronometraje - Jose VargasDocument5 pagesEjercicio Cronometraje - Jose VargasAlvaro Vargas GonzalesNo ratings yet
- Avance Del Trabajo Final - Grupo 04Document70 pagesAvance Del Trabajo Final - Grupo 04Alvaro Vargas GonzalesNo ratings yet
- Avance 1-Pt-EDocument5 pagesAvance 1-Pt-EAlvaro Vargas GonzalesNo ratings yet
- Guia de Laboratorio N°1-Parámetros Del Aire Húmedo GRUPO 10Document9 pagesGuia de Laboratorio N°1-Parámetros Del Aire Húmedo GRUPO 10Alvaro Vargas GonzalesNo ratings yet
- Lab4 - Diseño PCBDocument9 pagesLab4 - Diseño PCBAlvaro Vargas Gonzales100% (1)
- Problema A Resolver Grupo 5Document19 pagesProblema A Resolver Grupo 5Alvaro Vargas GonzalesNo ratings yet
- Actividad N°1Document1 pageActividad N°1Alvaro Vargas GonzalesNo ratings yet
- Lab01 Estrategiasdecontrol C5 5C VARGASDocument9 pagesLab01 Estrategiasdecontrol C5 5C VARGASAlvaro Vargas GonzalesNo ratings yet
- Tarea GrupalDocument1 pageTarea GrupalAlvaro Vargas GonzalesNo ratings yet
- Tarea Individual Semana 7Document1 pageTarea Individual Semana 7Alvaro Vargas GonzalesNo ratings yet
- Especificación e ingeniería de detalle de instrumentosDocument9 pagesEspecificación e ingeniería de detalle de instrumentosAlvaro Vargas GonzalesNo ratings yet
- Lab5-Fabricacion Circuito ImpresoDocument9 pagesLab5-Fabricacion Circuito ImpresoAlvaro Vargas GonzalesNo ratings yet
- Caminando y MiandoDocument2 pagesCaminando y MiandosgyhthtNo ratings yet
- Abascal Carranza - Ideas Fuerza - Mística de Acción Nacional - PANDocument103 pagesAbascal Carranza - Ideas Fuerza - Mística de Acción Nacional - PANRoberto Lobo0% (1)
- Informe FrecuenciaDocument3 pagesInforme FrecuenciaJose Jadir Layton CorzoNo ratings yet
- Instructivo Homologacion Digital PDFDocument14 pagesInstructivo Homologacion Digital PDFD Alejandro C UrregoNo ratings yet
- Tarea #1 (Levantamiento de Terreno Con Cinta)Document3 pagesTarea #1 (Levantamiento de Terreno Con Cinta)Will Yordan Lima QuispeNo ratings yet
- Hardy Cross y - RenouardDocument4 pagesHardy Cross y - RenouardAndres Jaimes EscaleraNo ratings yet
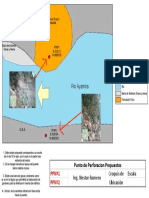
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDocument1 pageFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalNo ratings yet
- Atencion Telefonica 03:19Document140 pagesAtencion Telefonica 03:19Dani WhiteNo ratings yet
- Laboratorio #1 Determinación de Densidad en Sólidos y LíquidosDocument4 pagesLaboratorio #1 Determinación de Densidad en Sólidos y LíquidosErick TejadaNo ratings yet
- Examen Parcial - Semana 4 - Ra - Primer Bloque - Virtual - Simulación Gerencial - (Grupo b02)Document21 pagesExamen Parcial - Semana 4 - Ra - Primer Bloque - Virtual - Simulación Gerencial - (Grupo b02)LAURA DANIELA GARZON MARTINEZNo ratings yet
- Árboles de Decisión en RDocument18 pagesÁrboles de Decisión en RPedro RodríguezNo ratings yet
- Constitución SAC Yellow GroupDocument16 pagesConstitución SAC Yellow GroupGloria RodríguezNo ratings yet
- Definir un nicho: la clave del éxito empresarialDocument5 pagesDefinir un nicho: la clave del éxito empresarialValentina MezaNo ratings yet
- Significado de MacroeconomíaDocument13 pagesSignificado de Macroeconomíamaria penaloza100% (1)
- Plan Covid - Flat Up 213 PDFDocument30 pagesPlan Covid - Flat Up 213 PDFJorch Comunidad DE Ingenieros DEL PerúNo ratings yet
- Red estrella extendidaDocument3 pagesRed estrella extendidaAbraham Reyes0% (1)
- Baran A Cister VolvoDocument3 pagesBaran A Cister VolvoKevin Franco Quilla GutiérrezNo ratings yet
- 2 - Ejercicio de Simulación de MercadoDocument30 pages2 - Ejercicio de Simulación de MercadoDamaris NogalesNo ratings yet
- Políticas CONDITODocument8 pagesPolíticas CONDITOcarolina conditoNo ratings yet
- Formatos Selfmailer O AutoenviableDocument1 pageFormatos Selfmailer O AutoenviableVera Arauza AdrianaNo ratings yet
- Ley 28793-mDocument3 pagesLey 28793-mEstefani Reyes MamaniNo ratings yet
- Compendio FlorezDocument294 pagesCompendio FlorezERNESTONo ratings yet
- Actividad 2 IndividualDocument9 pagesActividad 2 IndividualLuzDaryGómezNo ratings yet
- Brochure - Gestion de FlotasDocument5 pagesBrochure - Gestion de FlotasEduardo Estewar Moran PittmanNo ratings yet
- Normativa Legal Seguridad IndustrialDocument9 pagesNormativa Legal Seguridad IndustrialEsteban Guamangallo VillamarínNo ratings yet
- OndasyopticaDocument3 pagesOndasyopticaCRISTIAN CAMILO MONTES VARGASNo ratings yet