You might also like
- Phase-Shift Keying (PSK) ModulationDocument7 pagesPhase-Shift Keying (PSK) Modulationanhminh81No ratings yet
- Carrier Modulation: Version 2 ECE IIT, KharagpurDocument7 pagesCarrier Modulation: Version 2 ECE IIT, KharagpurRahul PanwarNo ratings yet
- hw3 2024Document3 pageshw3 2024Hassan AliNo ratings yet
- Ee4501f18 HW 3Document7 pagesEe4501f18 HW 3al-muntheral-mairikiNo ratings yet
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanNo ratings yet
- EE419 Digital Communication Systems QuestionsDocument7 pagesEE419 Digital Communication Systems QuestionsSalai JeyaseelanNo ratings yet
- Narrowband Noise RepresentationDocument8 pagesNarrowband Noise RepresentationEvanora JavaNo ratings yet
- PHYS 381 W23 Assignment 4Document8 pagesPHYS 381 W23 Assignment 4Nathan NgoNo ratings yet
- Lect NB NoiseDocument8 pagesLect NB NoiseIbra NazlaNo ratings yet
- Exercises - Digital CommunicationsDocument34 pagesExercises - Digital CommunicationsMiguel FuentesNo ratings yet
- Midterm EE456 11Document4 pagesMidterm EE456 11Erdinç KayacıkNo ratings yet
- z6 Amplitude ModulationDocument10 pagesz6 Amplitude ModulationtsegayNo ratings yet
- תרגילים היילרןDocument83 pagesתרגילים היילרןMatanAbutbulNo ratings yet
- Tutorial8 2014 PDFDocument3 pagesTutorial8 2014 PDFAnonymous l59Y1aV3KNo ratings yet
- Adaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitDocument13 pagesAdaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitMohammed salah Abd elouahabNo ratings yet
- Lec30 - 210108063 - SAYAK BHATTACHARYADocument5 pagesLec30 - 210108063 - SAYAK BHATTACHARYAvasu sainNo ratings yet
- Non-Linear Models For High Power AmplifiersDocument18 pagesNon-Linear Models For High Power AmplifiersTùng Quách HuyNo ratings yet
- Hw3 Chap4 SolutionDocument13 pagesHw3 Chap4 Solutioncoasterfan13100% (1)
- ELEG 3124 Fourier Series and Transforms AssignmentsDocument16 pagesELEG 3124 Fourier Series and Transforms AssignmentsNguyễn Văn ĐứcNo ratings yet
- HW 5Document2 pagesHW 5milad_7410No ratings yet
- SIGNALS and SYSTEMS PDFDocument106 pagesSIGNALS and SYSTEMS PDFShashank Tiwari100% (1)
- ECS332 2015 Postmidterm U1Document87 pagesECS332 2015 Postmidterm U1Sanjay Kumar SumanNo ratings yet
- OPTIMAL CHEBYSHEV MULTISECTION MATCHING TRANSFORMER DESIGNDocument13 pagesOPTIMAL CHEBYSHEV MULTISECTION MATCHING TRANSFORMER DESIGNYURLEY ACEVEDO PEREZNo ratings yet
- Digital Control System Analysis and Design 4th Edition by Phillips ISBN Solution ManualDocument46 pagesDigital Control System Analysis and Design 4th Edition by Phillips ISBN Solution Manualraymond100% (22)
- Analog Communication - AM ModulatorsDocument5 pagesAnalog Communication - AM ModulatorsB.Prashant JhaNo ratings yet
- Problem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsDocument6 pagesProblem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsGarip KontNo ratings yet
- Signals and SystemsDocument42 pagesSignals and SystemsDeepa DhilipNo ratings yet
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocument4 pagesEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNo ratings yet
- Digital Communication: H V KumaraswamyDocument20 pagesDigital Communication: H V KumaraswamyJyotirmoy DekaNo ratings yet
- Worksheet IDocument6 pagesWorksheet IAlemayew AzezewNo ratings yet
- Assignment 2-1Document3 pagesAssignment 2-1opus2012No ratings yet
- L5 - Fourier Series (During Lecture)Document3 pagesL5 - Fourier Series (During Lecture)Layla RaschNo ratings yet
- Complexbaseband Representation of Bandpass SignalsDocument18 pagesComplexbaseband Representation of Bandpass SignalsPraneeth Karthikeya IndanaNo ratings yet
- Signals and SystemsDocument42 pagesSignals and Systemsjijo123408No ratings yet
- EE320A Tutorial Solutions Power Efficiency AM Modulation RLC Circuit Spectrum AnalysisDocument10 pagesEE320A Tutorial Solutions Power Efficiency AM Modulation RLC Circuit Spectrum AnalysisManish MathuriyaNo ratings yet
- EE 179 Digital and Analog Communication Systems Homework SolutionsDocument6 pagesEE 179 Digital and Analog Communication Systems Homework SolutionsAnthony KwoNo ratings yet
- AM Modulation and Demodulation SimulationDocument4 pagesAM Modulation and Demodulation SimulationasiffarookiNo ratings yet
- DSP Mid and End Question PaperDocument6 pagesDSP Mid and End Question PaperMohamed ZaheenNo ratings yet
- Lec8 Optimum ReceiverDocument36 pagesLec8 Optimum ReceiverIbra NazlaNo ratings yet
- Sigsys 1Document3 pagesSigsys 1Rounak MandalNo ratings yet
- M (T) U (T) : Upper Side Band Lower Side Band Upper Side Band Lower Side BandDocument5 pagesM (T) U (T) : Upper Side Band Lower Side Band Upper Side Band Lower Side BandHaroonRashidNo ratings yet
- ECE 461 Midterm Exam 2Document5 pagesECE 461 Midterm Exam 2Zhenyu HuoNo ratings yet
- RR210402 Signals - SystemsDocument8 pagesRR210402 Signals - SystemsThanikonda Reddy SreedharNo ratings yet
- Signals & Systems Chapter 3 MCQsDocument42 pagesSignals & Systems Chapter 3 MCQsa.karthik1982No ratings yet
- Assignment 7Document1 pageAssignment 7Việt Anh ĐinhNo ratings yet
- 3TR4 Exam 2015Document3 pages3TR4 Exam 2015RezaNo ratings yet
- Complexbaseband Representation of Bandpass SignalsDocument18 pagesComplexbaseband Representation of Bandpass SignalsKedir HassenNo ratings yet
- Assignment 1Document2 pagesAssignment 1Harry WillsmithNo ratings yet
- EEE-211 MergedDocument54 pagesEEE-211 Mergednakib mdNo ratings yet
- HYPERBOLIC PDE Solution of 1D Wave Equation Using MATLABDocument1 pageHYPERBOLIC PDE Solution of 1D Wave Equation Using MATLABmarcelo_fis_matNo ratings yet
- Mathematical Tripos Part III Control of Quantum SystemsDocument5 pagesMathematical Tripos Part III Control of Quantum SystemsKaustubhNo ratings yet
- Pulse Amplitude Modulated (PAM) SignalsDocument10 pagesPulse Amplitude Modulated (PAM) SignalsYingquan LiNo ratings yet
- Algorithm AssignmentDocument7 pagesAlgorithm Assignmentzayn alabidinNo ratings yet
- 2A1G Partial Differential EquationsDocument6 pages2A1G Partial Differential EquationsJohn HowardNo ratings yet
- Multiple Time Series: X y X T T N X y N T R T TDocument11 pagesMultiple Time Series: X y X T T N X y N T R T TAntonio EleuteriNo ratings yet
- Small Scale Fading in Radio PropagationDocument15 pagesSmall Scale Fading in Radio Propagationelambharathi88No ratings yet
- Lecture 2: The Damped OscillatorDocument4 pagesLecture 2: The Damped OscillatorMahendra PanwarNo ratings yet
- DSP Exam 1 Solutions and Key InformationDocument108 pagesDSP Exam 1 Solutions and Key InformationManikaushikNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- SasDocument140 pagesSasGk VasanthNo ratings yet
- The Challenges of 4G Network RolloutDocument14 pagesThe Challenges of 4G Network RolloutKhola KhanNo ratings yet
- Wireless Communication Systems & NetworksDocument1 pageWireless Communication Systems & NetworksGurvinder SinghNo ratings yet
- Mechta 2018Document22 pagesMechta 2018Hassan KhaledNo ratings yet
- Leaky BucketDocument19 pagesLeaky BucketIzharNo ratings yet
- BandwidthDocument13 pagesBandwidthAl HasaNo ratings yet
- Product Feature: A Guide To Phase-Locked OscillatorsDocument2 pagesProduct Feature: A Guide To Phase-Locked OscillatorsAl BaniNo ratings yet
- Dual-band antenna specificationsDocument2 pagesDual-band antenna specificationsyevobimNo ratings yet
- Omnitron Catalog 2014Document58 pagesOmnitron Catalog 2014Anonymous nC9gpUWP100% (1)
- CN MCQDocument16 pagesCN MCQsaumitra2No ratings yet
- Displaymax JR 1500 SpecsDocument1 pageDisplaymax JR 1500 SpecsFRANCISCONo ratings yet
- Syllabus for Radio Operator Certificate ExamDocument5 pagesSyllabus for Radio Operator Certificate Examjanine Goncalves100% (1)
- Ac Circuit Experiment: EquipmentDocument4 pagesAc Circuit Experiment: EquipmentBien BasbasNo ratings yet
- By Pratiksha P.PatilDocument15 pagesBy Pratiksha P.PatilPratiksha PatilNo ratings yet
- Motorola SP21 Brochure PDFDocument4 pagesMotorola SP21 Brochure PDFDenis MarquesNo ratings yet
- Radio TelephonyDocument2 pagesRadio TelephonyZakir Hussain JafriNo ratings yet
- Digital Transmission GuideDocument136 pagesDigital Transmission GuideGianne ObusanNo ratings yet
- Types of Mixers in Radar ReceiversDocument23 pagesTypes of Mixers in Radar ReceiversFarin Mahzabeen50% (2)
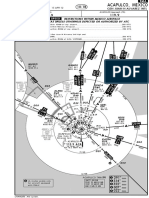
- Cartas Navegacion AcapulcoDocument15 pagesCartas Navegacion Acapulcowillycoyote1990-1100% (1)
- IC-F1721 F1821D Series BrochureDocument4 pagesIC-F1721 F1821D Series BrochureArmand CabantugNo ratings yet
- Wireless World 1955 01Document60 pagesWireless World 1955 01jacomartNo ratings yet
- Using Overture Design GuideDocument5 pagesUsing Overture Design Guideeleceng1979No ratings yet
- Unit Iv Reliability and Clock SynchronizationDocument15 pagesUnit Iv Reliability and Clock Synchronizationp.arunagiriNo ratings yet
- Konnektorler 2Document12 pagesKonnektorler 2lbakirebNo ratings yet
- R2-093767 Faster Release With RedirectionDocument4 pagesR2-093767 Faster Release With RedirectionSafwan ChatthaNo ratings yet
- TV Grundig Chassis LM Com Suplemento1+Document78 pagesTV Grundig Chassis LM Com Suplemento1+videosonNo ratings yet
- Cement Bond Log InterpretationDocument2 pagesCement Bond Log InterpretationTong ChaipanyakulNo ratings yet
- Data Sheet: 776 MHZ - 870 MHZ Low Noise, High Linearity Amplifi Er Module With Fail-Safe Bypass FeatureDocument12 pagesData Sheet: 776 MHZ - 870 MHZ Low Noise, High Linearity Amplifi Er Module With Fail-Safe Bypass Featurebiastee7690No ratings yet
- Kenwood ts-2000x PDFDocument152 pagesKenwood ts-2000x PDFAlfonso Byrt VitalichNo ratings yet
- s6 SyllabusDocument9 pagess6 SyllabusPrabith PradeepNo ratings yet