You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Relay SettingDocument144 pagesRelay SettingJaleesNo ratings yet
- Basic Electronics - The Power Supply PDFDocument36 pagesBasic Electronics - The Power Supply PDFSingaRajaNo ratings yet
- TSK Klyuch Mts 102 3a 250v 6a 125vac SPDT On On 0Document8 pagesTSK Klyuch Mts 102 3a 250v 6a 125vac SPDT On On 0Matilda BenteforNo ratings yet
- Manual Interruptot LTB-D1 3-Colum - 115 KVDocument211 pagesManual Interruptot LTB-D1 3-Colum - 115 KVPeter Jhoan Pulido Nuñez0% (1)
- Starting With The Name of Allah, The Most Beneficient and The Most MercifulDocument38 pagesStarting With The Name of Allah, The Most Beneficient and The Most MercifulJaleesNo ratings yet
- 13th LectureDocument24 pages13th LectureJaleesNo ratings yet
- DTS (A) /0026: Karachi Electric Supply Corporation LimitedDocument1 pageDTS (A) /0026: Karachi Electric Supply Corporation LimitedJaleesNo ratings yet
- 32 Panel FoundationDocument5 pages32 Panel FoundationJaleesNo ratings yet
- RPC Lecture 2Document29 pagesRPC Lecture 2JaleesNo ratings yet
- Lecture No. 12 Power System Reliability and Static Reliability Evaluation ModelsDocument28 pagesLecture No. 12 Power System Reliability and Static Reliability Evaluation ModelsJaleesNo ratings yet
- Lecture No. 12 Power System Reliability and Static Reliability Evaluation ModelsDocument28 pagesLecture No. 12 Power System Reliability and Static Reliability Evaluation ModelsJaleesNo ratings yet
- Load Characteristics and Power Factor Correction: 6 Lecture's OutlineDocument29 pagesLoad Characteristics and Power Factor Correction: 6 Lecture's OutlineJaleesNo ratings yet
- Approximate Methods of Distribution System Analysis (2) : 3 Lecture's OutlineDocument36 pagesApproximate Methods of Distribution System Analysis (2) : 3 Lecture's OutlineJaleesNo ratings yet
- 11th LectureDocument23 pages11th LectureJaleesNo ratings yet
- Load Characteristics: 5 Lecture's OutlineDocument36 pagesLoad Characteristics: 5 Lecture's OutlineJaleesNo ratings yet
- Shunt Capacitor Banks: 7 Lecture's OutlineDocument30 pagesShunt Capacitor Banks: 7 Lecture's OutlineJaleesNo ratings yet
- Introduction To Distribution SystemDocument26 pagesIntroduction To Distribution SystemJaleesNo ratings yet
- Apprentice Fitter Test: QUESTION 1: Choose The Best Answer From The Given OptionsDocument6 pagesApprentice Fitter Test: QUESTION 1: Choose The Best Answer From The Given OptionsJaleesNo ratings yet
- Approximate Methods of Distribution System Analysis: 2 Lecture's OutlineDocument22 pagesApproximate Methods of Distribution System Analysis: 2 Lecture's OutlineJaleesNo ratings yet
- Assigment EPDS 1 PDFDocument6 pagesAssigment EPDS 1 PDFJaleesNo ratings yet
- What Is Corona?Document28 pagesWhat Is Corona?JaleesNo ratings yet
- Existing Stock Exist. Please JustifyDocument1 pageExisting Stock Exist. Please JustifyJaleesNo ratings yet
- Assignment 02 PeerDocument51 pagesAssignment 02 PeerJaleesNo ratings yet
- Gema 3 GasDocument2 pagesGema 3 GasJaleesNo ratings yet
- Procurement of 11kV Trolleys: S.No. Make Description RequirementDocument2 pagesProcurement of 11kV Trolleys: S.No. Make Description RequirementJaleesNo ratings yet
- ASF Housing Scheme Subject: Authority Letter: Dated: 02 Sep, 2017Document1 pageASF Housing Scheme Subject: Authority Letter: Dated: 02 Sep, 2017JaleesNo ratings yet
- Sr. No. SAP Code Description Quantity RemarksDocument1 pageSr. No. SAP Code Description Quantity RemarksJaleesNo ratings yet
- SRO 571 UpdatedDocument1 pageSRO 571 UpdatediqbaljuttNo ratings yet
- Annual Report 2016Document93 pagesAnnual Report 2016JaleesNo ratings yet
- Grid Telephone NumbersDocument1 pageGrid Telephone NumbersJaleesNo ratings yet
- Gema 3 GasDocument2 pagesGema 3 GasJaleesNo ratings yet
- EE-526 "Electrical Power Transmission System Engineering"Document18 pagesEE-526 "Electrical Power Transmission System Engineering"JaleesNo ratings yet
- Pinnacle 27 Service ManualDocument15 pagesPinnacle 27 Service ManualMike Scudder0% (1)
- Lab Report FZ CurrentDocument9 pagesLab Report FZ Currentaimi BatrisyiaNo ratings yet
- Renewable Energy Sources Question BanksDocument4 pagesRenewable Energy Sources Question BanksthangarajelectresNo ratings yet
- Single-Phase Encapsulated GIS Up To 170kV: Blf/PassDocument2 pagesSingle-Phase Encapsulated GIS Up To 170kV: Blf/PassDaniel ChristianNo ratings yet
- 6high Power Full-Bridge DC-DC Converter Using A Center-Tapped Transformer and A Full-Wave Type Rectifier PDFDocument12 pages6high Power Full-Bridge DC-DC Converter Using A Center-Tapped Transformer and A Full-Wave Type Rectifier PDFmajidNo ratings yet
- Surge Counter Catalog RAW DD 4mbDocument5 pagesSurge Counter Catalog RAW DD 4mbkarthik achudhanNo ratings yet
- Project 1 Synchronous MachineDocument34 pagesProject 1 Synchronous MachineDivya Kumar SharmaNo ratings yet
- Improving The Grid Power Quality Using VirtualDocument6 pagesImproving The Grid Power Quality Using Virtualoctober87No ratings yet
- CH 17 PDFDocument22 pagesCH 17 PDFEdward Amoyen AbellaNo ratings yet
- Payra Thermal Power PlantDocument4 pagesPayra Thermal Power PlantAbdullah Al FoysalNo ratings yet
- Antriebstechnik Operating Instructions: Speed Controllers 480 SeriesDocument30 pagesAntriebstechnik Operating Instructions: Speed Controllers 480 SeriesEduardo HuaytaNo ratings yet
- MPPT T40 PDFDocument5 pagesMPPT T40 PDFandres alfonso varelo silgadoNo ratings yet
- 09072310301310Document18 pages09072310301310Walker BautistaNo ratings yet
- هندسة قوى كهربية دكتور عادل2016Document178 pagesهندسة قوى كهربية دكتور عادل2016AHMED BAKRNo ratings yet
- Product Manual 996Document7 pagesProduct Manual 996Kushal PednekarNo ratings yet
- Abb BrochureDocument12 pagesAbb BrochurewindaidenNo ratings yet
- Voltage Clamp CircuitsDocument6 pagesVoltage Clamp Circuitswww.vyeko_.bloger.hrNo ratings yet
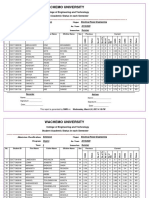
- Wachemo University: College of Engineering and Technology Student Academic Status in Each SemesterDocument5 pagesWachemo University: College of Engineering and Technology Student Academic Status in Each SemesterMitikuNo ratings yet
- Electrical & Electronics Measurement (EEMMI) Subject Code: 303Document31 pagesElectrical & Electronics Measurement (EEMMI) Subject Code: 303Blue eyes India kiNo ratings yet
- Wiring DiagramDocument5 pagesWiring DiagramWidhi ImranovichNo ratings yet
- Generator Set Data Sheet Hyw 1260 t5 Soundproof EnglishDocument6 pagesGenerator Set Data Sheet Hyw 1260 t5 Soundproof EnglishChhoan NhunNo ratings yet
- Turck MS24 112 RDocument2 pagesTurck MS24 112 RDavid Ulises Yunganina ZeaNo ratings yet
- Rubber Cable Test Report 1590388398Document1 pageRubber Cable Test Report 1590388398villano26No ratings yet
- BLDC FansDocument6 pagesBLDC Fansanbu selvanNo ratings yet
- ECE 131 FOTEX Laboratory 1.finalDocument7 pagesECE 131 FOTEX Laboratory 1.finalDonna AmbalongNo ratings yet
- Solar Energy Grid Integration Systems PPT - Google SearchDocument2 pagesSolar Energy Grid Integration Systems PPT - Google SearchNOELGREGORIONo ratings yet
- Electrochemical Capacitors Challenges and Opportunities For Real World Applications.Document5 pagesElectrochemical Capacitors Challenges and Opportunities For Real World Applications.khan445585No ratings yet