You might also like
- Understanding Shaft Voltage and Grounding Currents of Turbine GeneratorsDocument12 pagesUnderstanding Shaft Voltage and Grounding Currents of Turbine GeneratorsArni 2020No ratings yet
- Overview of Shorted Turn TheoryDocument29 pagesOverview of Shorted Turn TheoryRigoberto UrrutiaNo ratings yet
- Case StudiesDocument32 pagesCase StudiesSE Electrical100% (1)
- High Voltage DC Ramp Testing As A Diagnostic of Stator Insulation ConditionDocument4 pagesHigh Voltage DC Ramp Testing As A Diagnostic of Stator Insulation Conditionsquall55555No ratings yet
- Ceiling FanDocument6 pagesCeiling Fanswaggerz95No ratings yet
- A New Ieee Standard For Voltage Endurance Testing of Hydro Generator Stator CoilsDocument4 pagesA New Ieee Standard For Voltage Endurance Testing of Hydro Generator Stator Coilsapi-3804964100% (1)
- Black Swan AnalysisDocument16 pagesBlack Swan AnalysisDanielle MarquezNo ratings yet
- No Load and Block Rotor Test: Premier Trading CorporationDocument11 pagesNo Load and Block Rotor Test: Premier Trading CorporationKsr Akhil100% (1)
- End Winding Vibration Hydro GeneratorDocument5 pagesEnd Winding Vibration Hydro Generatorpatel chandramaniNo ratings yet
- Sinkron Motor - AtmiDocument87 pagesSinkron Motor - AtmiHaryo Probo100% (1)
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuNo ratings yet
- A Linear Motor or Linear Induction Motor Is An Alternating CurrentDocument6 pagesA Linear Motor or Linear Induction Motor Is An Alternating CurrentAnand KanaujiyaNo ratings yet
- Lecture11 - Stator Configuration Design CriteriaDocument18 pagesLecture11 - Stator Configuration Design Criteriaramaswamykama786No ratings yet
- 1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencyDocument50 pages1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencySing Yew LamNo ratings yet
- Vdocument - in Generator Maintenance Frame 6 Users Groupframe 6 Users Grouporgwp Contentuploads2018096bDocument27 pagesVdocument - in Generator Maintenance Frame 6 Users Groupframe 6 Users Grouporgwp Contentuploads2018096bMahesh MishraNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Transformers TheoryDocument67 pagesTransformers TheoryKansal Samarth100% (2)
- GVPI Assessment-EASA 2014 v2Document7 pagesGVPI Assessment-EASA 2014 v2mersiumNo ratings yet
- Determining The Efficiency of Induction Machines, Converters and SoftstartersDocument8 pagesDetermining The Efficiency of Induction Machines, Converters and Softstarterssadeq03No ratings yet
- El-CID Testing PDFDocument16 pagesEl-CID Testing PDFA.YOGAGURUNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Inspection ReportDocument4 pagesInspection Reportaryo suryandaruNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- DC Motor PrimerDocument26 pagesDC Motor PrimerastroltravlerNo ratings yet
- GBT 8564 2003 Specification For Installation of Hydraulic Turbine Generator UnitsDocument104 pagesGBT 8564 2003 Specification For Installation of Hydraulic Turbine Generator UnitsvietnhuNo ratings yet
- No Load and Blocked Rotor TestDocument19 pagesNo Load and Blocked Rotor Testsupere100% (4)
- Technical Note Winding Pitch LR - 040214Document2 pagesTechnical Note Winding Pitch LR - 040214shinichie100% (1)
- Induction Machine ModellingDocument23 pagesInduction Machine ModellingKishan Darji100% (1)
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduNo ratings yet
- Induction Motor Cogging and CrawlingDocument2 pagesInduction Motor Cogging and CrawlingChandaKundaNo ratings yet
- WEG Winding Damages Single Phase Motors 50041274 Brochure English WebDocument1 pageWEG Winding Damages Single Phase Motors 50041274 Brochure English WebalejoNo ratings yet
- Thermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesDocument2 pagesThermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesAnonymous sAmJfcVNo ratings yet
- The Knee Point Here Gives The Rated SpeedDocument2 pagesThe Knee Point Here Gives The Rated SpeedtankimsinNo ratings yet
- Damper Winding Influence On UMPDocument8 pagesDamper Winding Influence On UMPSrinivas KamarsuNo ratings yet
- Lecture13 - Stator Insulation System vs. Voltage & TemperatureDocument21 pagesLecture13 - Stator Insulation System vs. Voltage & Temperatureramaswamykama786No ratings yet
- Stator Core Vibration and Temperature Analysis of Hydropower Generation Unit at 100 HZ FrequencyDocument6 pagesStator Core Vibration and Temperature Analysis of Hydropower Generation Unit at 100 HZ FrequencySridhar TholasingamNo ratings yet
- A Novel Switched Reluctance Motor With C-Core StatorsDocument8 pagesA Novel Switched Reluctance Motor With C-Core Statorsapi-26587237No ratings yet
- 02 DT - New IEC StandardDocument2 pages02 DT - New IEC StandardkfaliNo ratings yet
- Analysis of Electrical MachineryDocument66 pagesAnalysis of Electrical Machineryzabig100% (1)
- Wound Rotor Motor TestingDocument5 pagesWound Rotor Motor Testingbige1911No ratings yet
- Motor WindingsDocument12 pagesMotor WindingsAbiodun IloriNo ratings yet
- Design of Saturable Reactors 31295000058858Document112 pagesDesign of Saturable Reactors 31295000058858aj7scribd100% (1)
- Design Guideline For Hairpin WindingDocument7 pagesDesign Guideline For Hairpin WindingXiaoShan LIUNo ratings yet
- ADRE DatasheetDocument31 pagesADRE DatasheetEduard RamosNo ratings yet
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 pagesInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822No ratings yet
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument37 pagesPower Systems Protection Course: Al-Balqa Applied UniversityLimuel Espiritu100% (1)
- Modified Winding Function Approach To Stator Fault Modelling of Synchronous GeneratorDocument6 pagesModified Winding Function Approach To Stator Fault Modelling of Synchronous GeneratormohammadNo ratings yet
- EL CID BrochureDocument4 pagesEL CID BrochureeesacNo ratings yet
- Unit 3 SRMDocument66 pagesUnit 3 SRMDr SriNo ratings yet
- Efficiency Testing of Medium Induction Motors-A Comment On IEEE STD 112-1991Document5 pagesEfficiency Testing of Medium Induction Motors-A Comment On IEEE STD 112-1991Aviv AlRasyidNo ratings yet
- Study of Double Cage Induction Motors With Different Rotor Bar MaterialsDocument7 pagesStudy of Double Cage Induction Motors With Different Rotor Bar MaterialsJunaid AhmadNo ratings yet
- Thermal Damage CurveDocument2 pagesThermal Damage CurveSamuel Johan Plasencia CoelloNo ratings yet
- Form - Wound - Repair - Specification Rewinding PDFDocument10 pagesForm - Wound - Repair - Specification Rewinding PDFBenjie CallantaNo ratings yet
- Basic SVPWMDocument6 pagesBasic SVPWMVAMSIKRISHNAEEENo ratings yet
- Induction MotorsDocument25 pagesInduction Motorsapi-3827132100% (2)
- The Influence of Axial Magnetic Centering Forces On Sleeve Bearing Induction MotorsDocument9 pagesThe Influence of Axial Magnetic Centering Forces On Sleeve Bearing Induction MotorsDavid Antonio Córdova LatorreNo ratings yet
- Modelling of The Three-Phase Induction Motor Using PDFDocument11 pagesModelling of The Three-Phase Induction Motor Using PDFShreya SonwaniNo ratings yet
- Harmonics in Three Phase Transformers: Delta ConnectionDocument24 pagesHarmonics in Three Phase Transformers: Delta Connectionshantanu kumar BaralNo ratings yet
- Dokumen - Tips Penguat Instrumentasi OpampDocument4 pagesDokumen - Tips Penguat Instrumentasi OpampAprie Alibi D SongklengNo ratings yet
- Entry Form Trinity MusicDocument4 pagesEntry Form Trinity MusicOsura GunasenaNo ratings yet
- Project ProposalDocument21 pagesProject ProposalOsura GunasenaNo ratings yet
- Black SwanDocument3 pagesBlack SwanOsura GunasenaNo ratings yet
- Impact TestDocument9 pagesImpact TestOsura GunasenaNo ratings yet
- Tensile TestDocument11 pagesTensile TestOsura GunasenaNo ratings yet
- Assignment I EEE 2214 ELECTRICAL MACHINES I Feb 2023 (2) (Original)Document1 pageAssignment I EEE 2214 ELECTRICAL MACHINES I Feb 2023 (2) (Original)Jimmy MachariaNo ratings yet
- Lit Review of Speed Control of High-Performance Brushless DC Motor Drives by Load Torque EstimationDocument2 pagesLit Review of Speed Control of High-Performance Brushless DC Motor Drives by Load Torque EstimationKobeed DhakalNo ratings yet
- Assignment - Answered - Electrical MachinesDocument3 pagesAssignment - Answered - Electrical Machinesappiagyei nicholasNo ratings yet
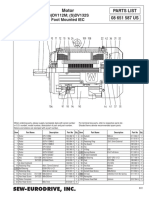
- (S) DFV 112 DFV132S Foot MDocument1 page(S) DFV 112 DFV132S Foot Mcarlos aguileraNo ratings yet
- Driving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteDocument31 pagesDriving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteMike ThomsonNo ratings yet
- 022 Lecture 22 360 Chapter 7 Single Phase Induction MotorDocument28 pages022 Lecture 22 360 Chapter 7 Single Phase Induction Motorrelavarasan_eee999No ratings yet
- Starting Method of MotorsDocument9 pagesStarting Method of MotorsRanil FernandoNo ratings yet
- SSD SyllabusDocument2 pagesSSD SyllabusshilpaNo ratings yet
- Arteche CT TRFLGHDTV enDocument40 pagesArteche CT TRFLGHDTV enAngga PradanaNo ratings yet
- Stepper Motor Control - Stepper Motor DriversDocument2 pagesStepper Motor Control - Stepper Motor DriversJEOVADJNo ratings yet
- Unit 5.1 Classification and ConstructionDocument16 pagesUnit 5.1 Classification and ConstructionArpit Personal 5No ratings yet
- DC GeneratorDocument35 pagesDC GeneratorMohammed Jalaluddin RayeenNo ratings yet
- EM-I Lab Viva Questions Updated OnDocument6 pagesEM-I Lab Viva Questions Updated OnNagamohan BilluNo ratings yet
- Electrical Machine SyllabusDocument3 pagesElectrical Machine SyllabusSuvra PattanayakNo ratings yet
- 13 PPT 1515 001 02 Generator SystemsDocument40 pages13 PPT 1515 001 02 Generator SystemsWashington JuniorNo ratings yet
- Analysis and Design of Low-Speed Six-Phase Fractional-Slot Concentrated-Winding PM Motor Applied To MarineDocument6 pagesAnalysis and Design of Low-Speed Six-Phase Fractional-Slot Concentrated-Winding PM Motor Applied To MarineaugustoNo ratings yet
- What Is AC Induction Motor CrawlingDocument2 pagesWhat Is AC Induction Motor CrawlingSubhakantaNo ratings yet
- CNC Feed DrivesDocument26 pagesCNC Feed DrivesAndrejNo ratings yet
- Ac Machines 4.1 Synchronous Machines: One Turn From Stator WindingDocument56 pagesAc Machines 4.1 Synchronous Machines: One Turn From Stator WindingmhNo ratings yet
- Catalogue CQDocument678 pagesCatalogue CQjuanNo ratings yet
- 968 Headlight CUDocument1 page968 Headlight CUNehmaizNo ratings yet
- Sendust Powder Toroidal CoreDocument3 pagesSendust Powder Toroidal CoreHauvuNo ratings yet
- Objective QuestionsDocument15 pagesObjective QuestionsAyyappa JavangulaNo ratings yet
- Idc (Industrial Drives and Control)Document4 pagesIdc (Industrial Drives and Control)Savan RathodNo ratings yet
- Construction & Working of AlternatorDocument14 pagesConstruction & Working of AlternatorBhavik PrajapatiNo ratings yet
- Physics Project On Transformers For 12 ClassDocument17 pagesPhysics Project On Transformers For 12 ClassAnveshNo ratings yet
- Electric MotorsDocument16 pagesElectric MotorsReszler ArnoldNo ratings yet
- MLP - Ee2302 Elect. Mach.-Ii New PDFDocument5 pagesMLP - Ee2302 Elect. Mach.-Ii New PDFsellakumarNo ratings yet