You might also like
- Impulse Balance Theory and its Extension by an Additional CriterionFrom EverandImpulse Balance Theory and its Extension by an Additional CriterionRating: 1 out of 5 stars1/5 (1)
- Learning in Extensive-Form Games I. Self-Confirming EquilibriaDocument36 pagesLearning in Extensive-Form Games I. Self-Confirming EquilibriaSuad SalijuNo ratings yet
- A Simple Adaptive Procedure Leading To Correlated EquilibriumDocument32 pagesA Simple Adaptive Procedure Leading To Correlated Equilibriumkarolina rycerzNo ratings yet
- Hart, Mas-Colell A Simple Adaptive Procedure Leading To Correlated EquilibriumDocument24 pagesHart, Mas-Colell A Simple Adaptive Procedure Leading To Correlated EquilibriumDonnaNo ratings yet
- Aumann Brandenburger95Document21 pagesAumann Brandenburger95Mauricio PadronNo ratings yet
- Game Theory IntroductionDocument5 pagesGame Theory IntroductionPriya RawatNo ratings yet
- Question On Dynamic Games PDFDocument1 pageQuestion On Dynamic Games PDFvictorginer8No ratings yet
- Notes 1st Year PHDDocument89 pagesNotes 1st Year PHDmauricio carrillo oliverosNo ratings yet
- Rational Iz AbilityDocument3 pagesRational Iz AbilityKawthar Yamna HoussineNo ratings yet
- Mathematical Social Sciences: Zhanwen Ding, Qiao Wang, Chaoying Cai, Shumin JiangDocument8 pagesMathematical Social Sciences: Zhanwen Ding, Qiao Wang, Chaoying Cai, Shumin JiangVladimir Henry Triguero RosalesNo ratings yet
- Game Theory Project Oct '08Document16 pagesGame Theory Project Oct '08Ruhi SonalNo ratings yet
- Game Theory - 3rd PartDocument18 pagesGame Theory - 3rd PartDoğukanNo ratings yet
- Nash EquilibriumDocument19 pagesNash Equilibriumprashanttripathi100% (1)
- Game Theory, Second Edition, 2014 Thomas S. FergusonDocument304 pagesGame Theory, Second Edition, 2014 Thomas S. FergusonMuchen DongNo ratings yet
- Coordination and Anti-Coordination GamesDocument4 pagesCoordination and Anti-Coordination Gamesdeathslayer112No ratings yet
- Lecture VIII: Learning: Markus M. M Obius March 6, 2003Document9 pagesLecture VIII: Learning: Markus M. M Obius March 6, 2003Prashant PatelNo ratings yet
- Intro To Game Theory by Chris FergusonDocument11 pagesIntro To Game Theory by Chris FergusonSpiros TramountanasNo ratings yet
- Ferguson T. S., Game Theory Text PDFDocument208 pagesFerguson T. S., Game Theory Text PDFAl KelNo ratings yet
- Chap 3 Nash EquilibriumDocument8 pagesChap 3 Nash EquilibriumKenza RdwNo ratings yet
- 3.1.nash Equilibrium.1.0Document13 pages3.1.nash Equilibrium.1.0007wasrNo ratings yet
- Holt - Pnas 2004 - Nash EquilibriumDocument12 pagesHolt - Pnas 2004 - Nash EquilibriumAresh VedaeeNo ratings yet
- Nash EquilibriumDocument11 pagesNash EquilibriumJFFNo ratings yet
- Lec7 Part2Document3 pagesLec7 Part2anon-377241No ratings yet
- Game Theory - Thomas S. FergusonDocument8 pagesGame Theory - Thomas S. FergusonKenneth TanNo ratings yet
- (Ferguson T.S.) Game TheoryDocument212 pages(Ferguson T.S.) Game TheoryAbhishekChatterjeeNo ratings yet
- Game Theory Solution Concept Non-Cooperative Game: Equilibrium StrategiesDocument8 pagesGame Theory Solution Concept Non-Cooperative Game: Equilibrium StrategiesAmaury Guillermo BaezNo ratings yet
- Cooperative Games: Core and Shapley Value: Roberto SerranoDocument24 pagesCooperative Games: Core and Shapley Value: Roberto SerranoPaula T. LimaNo ratings yet
- Game Theory Is "The Study ofDocument32 pagesGame Theory Is "The Study ofndmudhosiNo ratings yet
- What Is 2018 Game TheoryDocument5 pagesWhat Is 2018 Game Theorycursofisica paratodosNo ratings yet
- Game Theory: Lecture Notes by Y. NarahariDocument5 pagesGame Theory: Lecture Notes by Y. NarahariMahesh YadaNo ratings yet
- Game Theory: Class Notes For Math 167, Fall 2000 Thomas S. FergusonDocument7 pagesGame Theory: Class Notes For Math 167, Fall 2000 Thomas S. Fergusonccasas80No ratings yet
- Bargaining, Reputation and Equilibrium Selection in Repeated GamesDocument26 pagesBargaining, Reputation and Equilibrium Selection in Repeated GamesAnonymous a6UCbaJNo ratings yet
- Ch5 Tadelis PDFDocument25 pagesCh5 Tadelis PDFRajaramreddy VennamNo ratings yet
- 01.GTBL Bologna 2018 CarbonaraDocument44 pages01.GTBL Bologna 2018 CarbonaraEliana Ayelen CaiatiNo ratings yet
- Choosing A Strategy SetDocument3 pagesChoosing A Strategy SetLance Aaron LapuzNo ratings yet
- Calibrated Learning and Correlated EquilibriumDocument24 pagesCalibrated Learning and Correlated EquilibriumJoel Rubalcava GonzalezNo ratings yet
- GameDefinition StenrosDocument13 pagesGameDefinition Stenrosmaniaruna1923No ratings yet
- Nash EquilibriumDocument156 pagesNash EquilibriumfuriouNo ratings yet
- Economics ProjectDocument11 pagesEconomics ProjectpriyaNo ratings yet
- Module 2 Lecture 5Document5 pagesModule 2 Lecture 5Swapan Kumar SahaNo ratings yet
- 2 3 BoS ComputationDocument7 pages2 3 BoS ComputationTanoy DewanjeeNo ratings yet
- Chap 5-Extensive Form Games PDFDocument13 pagesChap 5-Extensive Form Games PDFFayçal SinaceurNo ratings yet
- Nash - Proc Natl Acad Sci USA, 36, 48 (1950)Document6 pagesNash - Proc Natl Acad Sci USA, 36, 48 (1950)Audy EstevesNo ratings yet
- Coursera ReadingDocument11 pagesCoursera Readinghyun P.No ratings yet
- A Short Introduction To Game TheoryDocument22 pagesA Short Introduction To Game TheoryDeepansh TyagiNo ratings yet
- History As A Coordination DeviceDocument15 pagesHistory As A Coordination DeviceMichele BoldrinNo ratings yet
- Duffy JennyDocument37 pagesDuffy JennyMK IslamNo ratings yet
- Unit 24Document28 pagesUnit 24Mais OmerNo ratings yet
- An Introduction To Game TheoryDocument45 pagesAn Introduction To Game TheoryUluberia CollegeNo ratings yet
- Breton The Contribution of ShapleyDocument11 pagesBreton The Contribution of ShapleyecrcauNo ratings yet
- A Strategic Perspective On If GamesDocument16 pagesA Strategic Perspective On If GamesHernando Hernández DavidNo ratings yet
- Extensive Form Games: ECON2112Document38 pagesExtensive Form Games: ECON2112leobe89No ratings yet
- Mixed Strategies and Nash Equilibrium: Game Theory Course: Jackson, Leyton-Brown & ShohamDocument10 pagesMixed Strategies and Nash Equilibrium: Game Theory Course: Jackson, Leyton-Brown & ShohamTanoy DewanjeeNo ratings yet
- Game TheoryDocument21 pagesGame TheoryJoan Albet SerraNo ratings yet
- Game Theory Overview Presentation by Scott Corwon of IMPACTSDocument33 pagesGame Theory Overview Presentation by Scott Corwon of IMPACTSStanfordEcon100% (8)
- Nash Equilibrium - Chapter 9Document12 pagesNash Equilibrium - Chapter 9Laiba Gohar AliNo ratings yet
- Play, Games, and Sports Contests PDFDocument10 pagesPlay, Games, and Sports Contests PDFAshok BaindhaNo ratings yet
- Pies 4 27 01 PDFDocument52 pagesPies 4 27 01 PDFJuani Rodriguez RottaNo ratings yet
- Sequential Games & Backwards InductionDocument9 pagesSequential Games & Backwards InductionJuani Rodriguez RottaNo ratings yet
- Extensive Form Games: Backward Induction and Imperfect Information GamesDocument35 pagesExtensive Form Games: Backward Induction and Imperfect Information GamesJuani Rodriguez RottaNo ratings yet
- Econ601L10 PDFDocument27 pagesEcon601L10 PDFJuani Rodriguez RottaNo ratings yet
- Concept MapDocument1 pageConcept Mapapi-402935758No ratings yet
- Al Rafay ProfileDocument8 pagesAl Rafay ProfileRana UsmanNo ratings yet
- Metric Conversion WorksheetDocument3 pagesMetric Conversion WorksheetKaiden HughesNo ratings yet
- Tele-Medicine: Presented by Shyam.s.s I Year M.SC NursingDocument12 pagesTele-Medicine: Presented by Shyam.s.s I Year M.SC NursingShyamNo ratings yet
- What Is StevedoringDocument10 pagesWhat Is StevedoringMinhaj KmNo ratings yet
- Admission Prspectus English 2021-2022Document9 pagesAdmission Prspectus English 2021-2022A.B. SiNo ratings yet
- FPI - Study Permit Application GuideDocument9 pagesFPI - Study Permit Application GuideKian Mark DarioNo ratings yet
- Thetford c250 InstallationDocument19 pagesThetford c250 InstallationCatalin Bejan100% (1)
- Arithmetic Mean PDFDocument29 pagesArithmetic Mean PDFDivya Gothi100% (1)
- Calculating Periodic Returns and Compound Annual ReturnsDocument2 pagesCalculating Periodic Returns and Compound Annual ReturnsAlucard77777No ratings yet
- Curriculum Vitae ofDocument4 pagesCurriculum Vitae ofAndrew OlsonNo ratings yet
- Platos Apology SummaryDocument3 pagesPlatos Apology SummaryFMSANo ratings yet
- Final Project Part-3 Marketing PlanDocument8 pagesFinal Project Part-3 Marketing PlanIam TwinStormsNo ratings yet
- Chapter 2 Fluid StaticsDocument26 pagesChapter 2 Fluid StaticsSoban Malik100% (1)
- Glorious Mysteries 1Document5 pagesGlorious Mysteries 1Vincent safariNo ratings yet
- Australia Harvesting Rainwater For Environment, Conservation & Education: Some Australian Case Studies - University of TechnologyDocument8 pagesAustralia Harvesting Rainwater For Environment, Conservation & Education: Some Australian Case Studies - University of TechnologyFree Rain Garden ManualsNo ratings yet
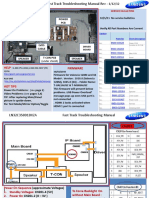
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Document4 pagesSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNo ratings yet
- Another Look at Pistis ChristouDocument17 pagesAnother Look at Pistis Christouakimel100% (1)
- Nur Syamimi - Noor Nasruddin - Presentation - 1002 - 1010 - 1024Document14 pagesNur Syamimi - Noor Nasruddin - Presentation - 1002 - 1010 - 1024abdulhasnalNo ratings yet
- Sector San Juan Guidance For RepoweringDocument12 pagesSector San Juan Guidance For RepoweringTroy IveyNo ratings yet
- THE FIELD SURVEY PARTY ReportDocument3 pagesTHE FIELD SURVEY PARTY ReportMacario estarjerasNo ratings yet
- Kumleben Commission ReportDocument232 pagesKumleben Commission ReportJulian Rademeyer100% (2)
- Data Processing and Management Information System (AvtoBərpaEdilmiş)Document6 pagesData Processing and Management Information System (AvtoBərpaEdilmiş)2304 Abhishek vermaNo ratings yet
- Shaira Narrative Report (Final)Document7 pagesShaira Narrative Report (Final)Sheryll TamangNo ratings yet
- DBL10 - Sapporo X Schematics Document: Compal ConfidentialDocument50 pagesDBL10 - Sapporo X Schematics Document: Compal ConfidentialEvgeniy BaranovskiyNo ratings yet
- Text Ranslation and TradicitonDocument283 pagesText Ranslation and TradicitonSCAF55100% (4)
- Clay and Shale, Robert L VirtaDocument24 pagesClay and Shale, Robert L VirtaRifqi Brilyant AriefNo ratings yet
- Akira 007Document70 pagesAkira 007Ocre OcreNo ratings yet
- RP Poster FinalDocument1 pageRP Poster Finalapi-270795195No ratings yet
- Data Iep Goals and Objectives ExampleDocument4 pagesData Iep Goals and Objectives Exampleapi-455438287100% (2)