You might also like
- Caso HonacysDocument2 pagesCaso HonacysDavid Carabali100% (1)
- Articulo La Importancia Del Uso de Diagramas en La EnsenanzaDocument6 pagesArticulo La Importancia Del Uso de Diagramas en La EnsenanzaCarmen GalarzaNo ratings yet
- Capitulo 4 de It EssentialsDocument6 pagesCapitulo 4 de It EssentialsChristian FajardoNo ratings yet
- Qué Es Un ProyectoDocument1 pageQué Es Un ProyectoDavid CarabaliNo ratings yet
- Proyecto Final Sistemas Inalambricos I 2018Document5 pagesProyecto Final Sistemas Inalambricos I 2018David CarabaliNo ratings yet
- TornoDocument3 pagesTornoDavid CarabaliNo ratings yet
- Qué Es Un ProyectoDocument1 pageQué Es Un ProyectoDavid CarabaliNo ratings yet
- Informe de ProyectoDocument11 pagesInforme de ProyectoDavid CarabaliNo ratings yet
- INNOVACIÓNDocument25 pagesINNOVACIÓNDavid CarabaliNo ratings yet
- Informe Fisica MCUDocument3 pagesInforme Fisica MCUDavid CarabaliNo ratings yet
- Coleccion Problem As CA 3Document134 pagesColeccion Problem As CA 3Ronny RamírezNo ratings yet
- Repaso MatlabDocument4 pagesRepaso MatlabDavid CarabaliNo ratings yet
- Ley de Atraccion y Repulsion de CargasDocument9 pagesLey de Atraccion y Repulsion de CargasDavid CarabaliNo ratings yet
- Informe FisicaDocument2 pagesInforme FisicaDavid CarabaliNo ratings yet
- Cromar Metales PDFDocument5 pagesCromar Metales PDFMija MendozaNo ratings yet
- B-Diseno de Productos ElectronicosDocument25 pagesB-Diseno de Productos ElectronicosDavid CarabaliNo ratings yet
- Programas para Sociedad de JóvenesDocument89 pagesProgramas para Sociedad de JóvenesJoel JmcNo ratings yet
- A-Diseño de Sistemas ElectronicosDocument28 pagesA-Diseño de Sistemas ElectronicosDavid CarabaliNo ratings yet
- Programacion Orientada A ObjetosDocument3 pagesProgramacion Orientada A ObjetosDavid CarabaliNo ratings yet
- Informe PLDs y HDLDocument3 pagesInforme PLDs y HDLDavid CarabaliNo ratings yet
- Proyecto de Grado 2Document79 pagesProyecto de Grado 2David CarabaliNo ratings yet
- Construcción e Interpretación Del Diagrama de Caja y BrazosDocument5 pagesConstrucción e Interpretación Del Diagrama de Caja y BrazosAndres GuevaraNo ratings yet
- Tarea 6 Inv Op 2019 2020Document4 pagesTarea 6 Inv Op 2019 2020Bryan TorresNo ratings yet
- Perfil de Proyecto AnalisisDocument34 pagesPerfil de Proyecto AnalisisOscar Emir VelardeNo ratings yet
- Curso Basico de Argis Semana IDocument28 pagesCurso Basico de Argis Semana ILuis HuamaniNo ratings yet
- Seguridad Operacional en El Area de InformaticaDocument22 pagesSeguridad Operacional en El Area de InformaticaTekikNo ratings yet
- Taller 2 de Rendimiento de ComputadoresDocument3 pagesTaller 2 de Rendimiento de Computadoresjesus consuegraNo ratings yet
- Rmi (Remote Method Invocation)Document31 pagesRmi (Remote Method Invocation)Oscar de la ManchaNo ratings yet
- Mapa Conceptual CreatividadDocument3 pagesMapa Conceptual CreatividadMaigreth ContrerasNo ratings yet
- Familia de Protocolos de InternetDocument73 pagesFamilia de Protocolos de InternetHéctor BocNo ratings yet
- Scolari - 5 Leyes de Las InterfacesDocument9 pagesScolari - 5 Leyes de Las InterfacesOctavio Mercado100% (2)
- Matriz de ConsitenciaDocument8 pagesMatriz de ConsitenciaSimon Laurente SaenzNo ratings yet
- Introduccion A IODocument13 pagesIntroduccion A IOToño RivasNo ratings yet
- Sockets y Procesadores Intel y AMDDocument21 pagesSockets y Procesadores Intel y AMDJuan67% (3)
- Prc3a1ctica SQL 3Document3 pagesPrc3a1ctica SQL 3StevenWilliamsCastilloAbrilNo ratings yet
- Displays de Cristal Líquido (LCD) para CaracteresDocument22 pagesDisplays de Cristal Líquido (LCD) para CaracteresJairo Josué SierraNo ratings yet
- Programa Lógica y Estructuras Discretas Uned 2017Document6 pagesPrograma Lógica y Estructuras Discretas Uned 2017Francisco Medina GarcíaNo ratings yet
- Manual Canaima PDFDocument6 pagesManual Canaima PDFluis mendezNo ratings yet
- Manual de Diseño, Creación, Modificación y Eliminación de Los Documentos Del S.G.C.Document10 pagesManual de Diseño, Creación, Modificación y Eliminación de Los Documentos Del S.G.C.Yamile Rivero Bohorquez100% (1)
- Egm 2008 WGS 84Document6 pagesEgm 2008 WGS 84Johana TruffeNo ratings yet
- Ansipot t04Document2 pagesAnsipot t04Bryan Josue Mejia LazoNo ratings yet
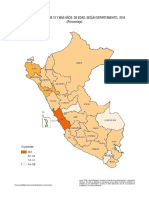
- POTENCIALIDADES DEL PERU (Mapa)Document10 pagesPOTENCIALIDADES DEL PERU (Mapa)Vladimir CruzNo ratings yet
- 1 INTRODUCCIÓN A TCP IP - Parcial II PDFDocument59 pages1 INTRODUCCIÓN A TCP IP - Parcial II PDFDayana Farinango RomeroNo ratings yet
- Curso de Ajax - AjaxyaDocument93 pagesCurso de Ajax - AjaxyaMauro CastroNo ratings yet
- Actividad 3Document4 pagesActividad 3Jennifer MonteroNo ratings yet
- Instrumento para Evaluar SilaboDocument10 pagesInstrumento para Evaluar SilaboJoel Ninanya Rojas100% (2)
- Jessica Escobar - ScribdDocument10 pagesJessica Escobar - ScribdJessy EscobarNo ratings yet
- Foda SacrpDocument2 pagesFoda SacrpDaniel Morán YepesNo ratings yet
- Simulaciòn de MontecarloDocument19 pagesSimulaciòn de MontecarloSat0No ratings yet