You might also like
- SFD API RP 2a WSD 22ndDocument19 pagesSFD API RP 2a WSD 22ndRoberto Andrés Fernández DomínguezNo ratings yet
- GL 007Document19 pagesGL 007444462No ratings yet
- Psi SACS PDFDocument210 pagesPsi SACS PDFNabigh NabiylNo ratings yet
- Technical Information HSL3Document10 pagesTechnical Information HSL3William VillamizarNo ratings yet
- SACS Modelling EseminarDocument3 pagesSACS Modelling EseminarBolarinwaNo ratings yet
- ABS Fatigue Life Assessment 2014Document1 pageABS Fatigue Life Assessment 2014Fandy SipataNo ratings yet
- API WSD Punch CodeCheckDocument7 pagesAPI WSD Punch CodeCheckKhải TrươngNo ratings yet
- Materials For JointsDocument25 pagesMaterials For Jointshariharanoilgas100% (1)
- Offshore Seismic Analysis Using SACSDocument24 pagesOffshore Seismic Analysis Using SACSLinda Cendekia Suprobo100% (1)
- A3 GeniE Tubular JointDocument60 pagesA3 GeniE Tubular JointFabio OkamotoNo ratings yet
- Section A: 2.1. Sling Design Load and SelectionDocument30 pagesSection A: 2.1. Sling Design Load and SelectionThomas StephenNo ratings yet
- USD T BeamDocument10 pagesUSD T BeammanowarNo ratings yet
- DNV Os C102Document133 pagesDNV Os C102Wilson Barreta JuniorNo ratings yet
- API RP 2A 21st 2007 - Joint OnlyDocument20 pagesAPI RP 2A 21st 2007 - Joint Onlythongchai_0070% (1)
- Design and Analysis of High Pressure Door With Stiffened PlateDocument12 pagesDesign and Analysis of High Pressure Door With Stiffened PlateSyed Faiz Quadri100% (1)
- Wu-Performance of LS-DYNA Concrete Constitutive ModelsDocument14 pagesWu-Performance of LS-DYNA Concrete Constitutive ModelsaktcNo ratings yet
- For Buildings and Other Structures For Wind LoadsDocument28 pagesFor Buildings and Other Structures For Wind LoadsMarinos Giannoukakis100% (1)
- Mathcad - Sandy SoilDocument1 pageMathcad - Sandy SoillsatchithananthanNo ratings yet
- Design Concrete and Steel For Oil and Gas-Online Course - Rev5Document4 pagesDesign Concrete and Steel For Oil and Gas-Online Course - Rev5elreedymanNo ratings yet
- A Comparison of Frame Stability Analysis Methods in ANSI/AISC 360-05Document12 pagesA Comparison of Frame Stability Analysis Methods in ANSI/AISC 360-05MugamputhagamNo ratings yet
- Offshore Platform Fatigue Reliability AnalysisDocument8 pagesOffshore Platform Fatigue Reliability AnalysisAlexis LopezNo ratings yet
- Offshore Structure Loads, Design & Pile ConsiderationsDocument2 pagesOffshore Structure Loads, Design & Pile Considerationsjiokoijiko100% (1)
- Welding of Hollow Structural Sections PDFDocument5 pagesWelding of Hollow Structural Sections PDFKooroshNo ratings yet
- Modeling Topside Structures in SACSDocument11 pagesModeling Topside Structures in SACSnazeer_mohdNo ratings yet
- 39-29computational Buckling Analysis of Wind Loaded5-1-PBDocument9 pages39-29computational Buckling Analysis of Wind Loaded5-1-PBzaneliuNo ratings yet
- Offshore Platform Tutorial: Introduction to SACS Finite Element Analysis SoftwareDocument13 pagesOffshore Platform Tutorial: Introduction to SACS Finite Element Analysis Softwarenazeer_mohd100% (2)
- CH 3 Design of Bolts in ConnectionsPartADocument22 pagesCH 3 Design of Bolts in ConnectionsPartAJakesNo ratings yet
- The Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderDocument12 pagesThe Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderdadNo ratings yet
- Reportoorebeek PDFDocument190 pagesReportoorebeek PDFKing1971No ratings yet
- Dynamic Buckling of Cylindrical Storage PDFDocument14 pagesDynamic Buckling of Cylindrical Storage PDFamar alicheNo ratings yet
- 1.d. Overall Damping For Piled Offshore Support StructuresDocument4 pages1.d. Overall Damping For Piled Offshore Support StructuresShokoofeAlaviNo ratings yet
- CssDocument2 pagesCssgoprhasetyoNo ratings yet
- 6 - CE 511 - Base Plate Design PDFDocument33 pages6 - CE 511 - Base Plate Design PDFJayson RamosNo ratings yet
- Finite Element Simplified Fatigue AnalysisDocument4 pagesFinite Element Simplified Fatigue AnalysisJin Hwan KimNo ratings yet
- Grating Type Din 24537Document7 pagesGrating Type Din 24537Kresimir SimeonNo ratings yet
- Simple Procedure For Seismic Analysis of Liquid Storage TanksDocument5 pagesSimple Procedure For Seismic Analysis of Liquid Storage Tankscisco100% (1)
- Anchor Bolt Chair Design ParametersDocument2 pagesAnchor Bolt Chair Design ParametersAnonymous p0iwBoNo ratings yet
- Module 1c - Analysis of Offshore StructruesDocument147 pagesModule 1c - Analysis of Offshore Structruesyash.nth19No ratings yet
- Lateral Loading of Suction Pile in 3D 1488918612Document35 pagesLateral Loading of Suction Pile in 3D 1488918612mohamed magdyNo ratings yet
- Mathcad - Grout Connection HSE RulesDocument3 pagesMathcad - Grout Connection HSE RulesRayodcNo ratings yet
- Skew Load Lift AnalysisDocument3 pagesSkew Load Lift AnalysisBolarinwadeNo ratings yet
- Accidental Limit State Design of Offshore StructuresDocument49 pagesAccidental Limit State Design of Offshore StructuresMukhlas SabaraNo ratings yet
- Fatigue-Mat 4-DeterministicDocument35 pagesFatigue-Mat 4-Deterministicfahmi rajziNo ratings yet
- Example 4Document4 pagesExample 4dane05No ratings yet
- Buckling Fatigue AnalysisDocument55 pagesBuckling Fatigue AnalysisHarshit Garg100% (2)
- GeniE Code Checking BeamsDocument38 pagesGeniE Code Checking BeamsajayNo ratings yet
- Norsok Standard Structural DesignDocument19 pagesNorsok Standard Structural Designsamprof4vwNo ratings yet
- Buckling CheckDocument61 pagesBuckling CheckOlanrewaju OkunolaNo ratings yet
- Transmission Line Design and Steel Pole StructuresDocument27 pagesTransmission Line Design and Steel Pole StructuresDanNo ratings yet
- Manual SACS - SeastateDocument7 pagesManual SACS - SeastatevenacavainferiorNo ratings yet
- Fatigue Life Calculation of WeldDocument15 pagesFatigue Life Calculation of WeldSaut Maruli Tua SamosirNo ratings yet
- Sesam Feature DescriptionDocument207 pagesSesam Feature DescriptionYoungtae KimNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- SFD API RP 2A WSD 21stDocument23 pagesSFD API RP 2A WSD 21stputra wiraNo ratings yet
- SFD API RP 2A WSD 22ndDocument19 pagesSFD API RP 2A WSD 22ndputra wiraNo ratings yet
- SFD N004 2013 PDFDocument21 pagesSFD N004 2013 PDFMohamed Abo-ZaidNo ratings yet
- Calculation Sheet: Title: Structure Design Location: Rev.: BDocument1 pageCalculation Sheet: Title: Structure Design Location: Rev.: Biwanguna71No ratings yet
- Calculation Sheet: 6.2. Support ReactionsDocument1 pageCalculation Sheet: 6.2. Support Reactionsiwanguna71No ratings yet
- Calculation Sheet: D B F VDocument1 pageCalculation Sheet: D B F Viwanguna71No ratings yet
- Calculation Sheet: B F F A A ADocument1 pageCalculation Sheet: B F F A A Aiwanguna71No ratings yet
- 44Document1 page44iwanguna71No ratings yet
- Calculation Sheet: F A A B F F A A ADocument1 pageCalculation Sheet: F A A B F F A A Aiwanguna71No ratings yet
- Calculation Sheet: 5. Penulangan Pilecap: STA 0+975 STA 1+175Document1 pageCalculation Sheet: 5. Penulangan Pilecap: STA 0+975 STA 1+175iwanguna71No ratings yet
- Calculation Sheet: Min - Max Rebar Check: Min RebarDocument1 pageCalculation Sheet: Min - Max Rebar Check: Min Rebariwanguna71No ratings yet
- SEO-OPTIMIZED TITLE FOR WIKA PC SPUN PILE SPECIFICATIONDocument3 pagesSEO-OPTIMIZED TITLE FOR WIKA PC SPUN PILE SPECIFICATIONiwanguna71No ratings yet
- sm1 4 WWWDocument21 pagessm1 4 WWWAnonymous D5s00DdUNo ratings yet
- SKorea Seoul Map KoreaENGDocument1 pageSKorea Seoul Map KoreaENGiwanguna71No ratings yet
- Solutions Looking For Problems... : BeamsDocument16 pagesSolutions Looking For Problems... : BeamslifeadventureNo ratings yet
- Spun Pile Wika-Tp 800&1000Document3 pagesSpun Pile Wika-Tp 800&1000iwanguna71100% (1)
- Calculation Sheet: 1.4 Pilehead ReinforcementDocument1 pageCalculation Sheet: 1.4 Pilehead Reinforcementiwanguna71No ratings yet
- Basic Definitions of Soils PDFDocument7 pagesBasic Definitions of Soils PDFAntónio FontesNo ratings yet
- CTT Elastomeric BearingsDocument20 pagesCTT Elastomeric Bearingsjajaytt100% (1)
- Laboratory study of Marshall properties and durability of asphalt concreteDocument84 pagesLaboratory study of Marshall properties and durability of asphalt concreteNana SupriatnaNo ratings yet
- ASCE ASD Load CombinationsDocument2 pagesASCE ASD Load Combinationsrodriguez.gaytanNo ratings yet
- (Idn) Wjqt-140117-01 Aerial Cable 12 - 24fDocument1 page(Idn) Wjqt-140117-01 Aerial Cable 12 - 24fiwanguna71No ratings yet
- BRidge Rating MEthod PDFDocument22 pagesBRidge Rating MEthod PDFiwanguna71No ratings yet
- Standard Tightening TorqueDocument1 pageStandard Tightening TorquebalramkinageNo ratings yet
- CrossDocument1 pageCrossiwanguna71No ratings yet
- BRidge Rating MEthodDocument22 pagesBRidge Rating MEthodiwanguna71No ratings yet
- CTT Elastomeric BearingsDocument20 pagesCTT Elastomeric Bearingsjajaytt100% (1)
- Key To Test DataDocument1 pageKey To Test DataRheymar Dela Rosa DiwaNo ratings yet
- Bolt Tightening ForceDocument1 pageBolt Tightening Forceiwanguna71No ratings yet
- Belt Conveyor PDFDocument33 pagesBelt Conveyor PDFiwanguna71100% (1)
- Especificaciones Tanques de AceroDocument6 pagesEspecificaciones Tanques de AcerojhobanybernalNo ratings yet
- Machine Component Design QuestionsDocument6 pagesMachine Component Design Questionssuneel kumar rathoreNo ratings yet
- Agricultural Sprayer Vehicle With Router Weeder and Seed Sower-19592 PDFDocument14 pagesAgricultural Sprayer Vehicle With Router Weeder and Seed Sower-19592 PDFchinnababuNo ratings yet
- Paper-1 Test-1Document65 pagesPaper-1 Test-1Sri100% (1)
- CmechDocument10 pagesCmechdaskhagoNo ratings yet
- Indian Standard: Code of Practice For Calculation of Settlement of FoundationsDocument23 pagesIndian Standard: Code of Practice For Calculation of Settlement of FoundationsSuraj KumarNo ratings yet
- Lecture 12 - Advanced ST SysDocument73 pagesLecture 12 - Advanced ST SysAmgad Aly FahmyNo ratings yet
- Weld Strength and Design PDFDocument47 pagesWeld Strength and Design PDFkhairulNo ratings yet
- Opti StructDocument109 pagesOpti StructBalram PurnaaNo ratings yet
- Insrt PlateDocument2 pagesInsrt PlatearjunNo ratings yet
- Ballistic Performance of Unidirectional Glass Fiber Laminated Composite Plate Under Normal and Oblique ImpactDocument8 pagesBallistic Performance of Unidirectional Glass Fiber Laminated Composite Plate Under Normal and Oblique ImpactVeeturiVarunNo ratings yet
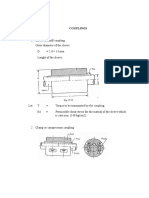
- CouplingsDocument15 pagesCouplingshudaperistesNo ratings yet
- Torsion 03 PDFDocument17 pagesTorsion 03 PDFAnonymous yyjpEsydasNo ratings yet
- Knee Connection at HaunchDocument27 pagesKnee Connection at HaunchvinothsurendranNo ratings yet
- Structural ExDocument14 pagesStructural ExSheryll de Guzman0% (1)
- Case Study: Unsaturated Embankment Failure On Soft SoilsDocument10 pagesCase Study: Unsaturated Embankment Failure On Soft Soilsdbsurbf frhbsuvrNo ratings yet
- Entropy Based Fatigue Fracture Failure Prediction and Structural Health MonitoringDocument240 pagesEntropy Based Fatigue Fracture Failure Prediction and Structural Health MonitoringNoushad Bin Jamal Structural EngineerNo ratings yet
- Stress Wave Propgation-Theory PDFDocument16 pagesStress Wave Propgation-Theory PDFAnkit KumarNo ratings yet
- Jayam College of Engineering & Technology Fluid Mechanics & Machinery Me1202Document17 pagesJayam College of Engineering & Technology Fluid Mechanics & Machinery Me1202Muthuvel MNo ratings yet
- Shear Design From Air DeckDocument4 pagesShear Design From Air Deckmjnasar khan jamalNo ratings yet
- Advanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesDocument23 pagesAdvanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesgulinNo ratings yet
- Design of Process Vessels and Pipes BC BhattacharyaDocument12 pagesDesign of Process Vessels and Pipes BC BhattacharyaRADHE GRAPHICSNo ratings yet
- Car Door Opening Geometry For Enhanced EntryDocument70 pagesCar Door Opening Geometry For Enhanced Entry김병곤No ratings yet
- Analysing The Mechanical Behaviour of TH e Glass Fibre and Ipn ReinDocument9 pagesAnalysing The Mechanical Behaviour of TH e Glass Fibre and Ipn ReinfrindgeNo ratings yet
- A Methodology For Flexibility Analysis of Process Piping-2017Document10 pagesA Methodology For Flexibility Analysis of Process Piping-2017Vishal SoniNo ratings yet
- High Strength CGSTDocument15 pagesHigh Strength CGSTLeonardoNo ratings yet
- Structural & Stress Analysis 3 09-10Document6 pagesStructural & Stress Analysis 3 09-10Isuru Udayanga NanayakkaraNo ratings yet
- MOM Notes Mod1, Mod2, Mod3, Mod4 & Mod5 Updated On 23-03-2021Document293 pagesMOM Notes Mod1, Mod2, Mod3, Mod4 & Mod5 Updated On 23-03-2021hareesh sNo ratings yet
- Machine Design and Shop Practice (ELEMENTS)Document5 pagesMachine Design and Shop Practice (ELEMENTS)Gold BlandoNo ratings yet
- DTA Guidelines For Antenna InstallationsDocument60 pagesDTA Guidelines For Antenna InstallationsivanfernandorodriguezNo ratings yet
- Meyer Peter Muller (1948)Document14 pagesMeyer Peter Muller (1948)Andre Prakoso100% (1)