You might also like
- Metacentric Height Apparatus: User ManualDocument8 pagesMetacentric Height Apparatus: User ManualSuleman Azhar100% (1)
- Metacentric Height of Ship ModelDocument4 pagesMetacentric Height of Ship ModelmitulkindNo ratings yet
- Lab Report Metacentric Height Latest PDFDocument9 pagesLab Report Metacentric Height Latest PDFSharip MaxwellNo ratings yet
- Metacentric Height of A Floating BodyDocument4 pagesMetacentric Height of A Floating BodyAdil Javed Chaudhary100% (4)
- Metacentric Height Apparatus ManualDocument11 pagesMetacentric Height Apparatus ManualmariyamsattarNo ratings yet
- Metacentric HeightDocument26 pagesMetacentric Heightlindzay100% (1)
- Experiment 8 - Falling Sphere Viscometer ExperimentDocument5 pagesExperiment 8 - Falling Sphere Viscometer ExperimentAhmed NabilNo ratings yet
- Forced Vortex FlowDocument12 pagesForced Vortex FlowSaravin SelhvaduraiNo ratings yet
- CM SQA Stability Past PapersDocument36 pagesCM SQA Stability Past Papersdrupway.demoNo ratings yet
- Metacentric Height PPT 3Document19 pagesMetacentric Height PPT 3Ashok Kumar RajanavarNo ratings yet
- Stability of A Floating BodyDocument11 pagesStability of A Floating BodyDember Paul100% (1)
- 1 - Viscosity Measurement by Falling Sphere - Ver2012Document6 pages1 - Viscosity Measurement by Falling Sphere - Ver2012James Nevin GoNo ratings yet
- Throttling CalorimeterDocument6 pagesThrottling CalorimeterBoby MainroNo ratings yet
- Metacentre and Metacentric HeightDocument4 pagesMetacentre and Metacentric HeightleonNo ratings yet
- Fluid Flow Measurement PDFDocument25 pagesFluid Flow Measurement PDFMohamedNo ratings yet
- Hydrostatic Pressure Plane SurfaceDocument5 pagesHydrostatic Pressure Plane SurfaceAmmir HakimNo ratings yet
- Experiment Instructions: HM150.06 Stability of A Floating BodyDocument12 pagesExperiment Instructions: HM150.06 Stability of A Floating Bodys_nimalanNo ratings yet
- Metacentric HeightDocument6 pagesMetacentric HeightdonprofaghatiseNo ratings yet
- Lab ReportDocument5 pagesLab ReportParveen LatherNo ratings yet
- Stress and StrainDocument7 pagesStress and StrainAnonymous mXicTi8hBNo ratings yet
- NAME 157: Hydrostatics & StabilityDocument28 pagesNAME 157: Hydrostatics & StabilityM HASIN ISHMAM JEETNo ratings yet
- Dead Weight GaugecalibrationDocument3 pagesDead Weight Gaugecalibrationusman_uet08No ratings yet
- 2 Metacentric HeightDocument4 pages2 Metacentric HeightAshlin Augusty100% (1)
- Experiment 3 Hydraulics LabDocument12 pagesExperiment 3 Hydraulics LabMatt NashrudinNo ratings yet
- Chapter 2 Buoyancy StabilityDocument18 pagesChapter 2 Buoyancy StabilitykohNo ratings yet
- Hydrostatic Force On A Submerged SurfaceDocument11 pagesHydrostatic Force On A Submerged Surfaceum4alltravel100% (1)
- Gravity Dam ForcesDocument46 pagesGravity Dam ForcesChella ChithiraveluNo ratings yet
- ME2134-1 Lab Manual (Stability of Floating Body)Document11 pagesME2134-1 Lab Manual (Stability of Floating Body)dasdasNo ratings yet
- Stability of Floating Body: Department of Mechanical Engineering National University of SingaporeDocument6 pagesStability of Floating Body: Department of Mechanical Engineering National University of SingaporeHaoran AndyNo ratings yet
- Lab 4 Impact of Jet Sem 2 20202021Document11 pagesLab 4 Impact of Jet Sem 2 20202021gorillaz incNo ratings yet
- Experiment 2 - Hydrostatic BenchDocument10 pagesExperiment 2 - Hydrostatic BenchUb Usoro100% (1)
- Exp 1-Hele ShawDocument1 pageExp 1-Hele Shawadityain2003No ratings yet
- Lec. 2 Stability and Determinacy of StructuresDocument53 pagesLec. 2 Stability and Determinacy of Structuresahmed 312No ratings yet
- Civil Engineering Lab 2: Faculty of Engineering and Built EnvironmentDocument7 pagesCivil Engineering Lab 2: Faculty of Engineering and Built EnvironmentAdel MoflhiNo ratings yet
- Exp 3 WeirsDocument11 pagesExp 3 WeirsAshrafNamamuTeratas100% (1)
- Lecture 4 - Fluid FlowDocument34 pagesLecture 4 - Fluid Flowisrael moizo dintsiNo ratings yet
- Laminar Flow Table: Name: Animesh Phatowali Roll No: 17AE30005 Group: 6 Experiment:7Document7 pagesLaminar Flow Table: Name: Animesh Phatowali Roll No: 17AE30005 Group: 6 Experiment:7Animesh PhatowaliNo ratings yet
- Loading Compartment Terms: Filled TrimmedDocument17 pagesLoading Compartment Terms: Filled TrimmedNyan Min HtetNo ratings yet
- AM2530 Tutorial3Document2 pagesAM2530 Tutorial3Ashok YadavNo ratings yet
- Tutorial 2 (B)Document2 pagesTutorial 2 (B)Ahmad Sabree Abdul BasitNo ratings yet
- Specific Energy Hydraulic Jumps WeirsDocument23 pagesSpecific Energy Hydraulic Jumps WeirsHaris jugnooNo ratings yet
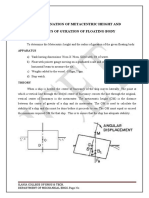
- Experiment No: Date: Determination of Metacentric Height and Radius of Gyration of Floating BodyDocument6 pagesExperiment No: Date: Determination of Metacentric Height and Radius of Gyration of Floating Bodykanavan monNo ratings yet
- Coventry UniversityDocument20 pagesCoventry UniversityDuncoh DunNo ratings yet
- 09-NAC-Numerical Integration Method (171229) - Student PDFDocument41 pages09-NAC-Numerical Integration Method (171229) - Student PDFMehedi Hossain MithilNo ratings yet
- Metacentric HeightDocument4 pagesMetacentric HeightVrushiket PatilNo ratings yet
- Cvs 348: Engineering HydrologyDocument11 pagesCvs 348: Engineering Hydrologysalt2009No ratings yet
- Resistance and Power CalculationDocument23 pagesResistance and Power CalculationgksahaNo ratings yet
- Beams-Shear and Moment 2Document28 pagesBeams-Shear and Moment 2ZdenkoNo ratings yet
- 4 - Buoyancy and Floatation - Tutorial Solution PDFDocument18 pages4 - Buoyancy and Floatation - Tutorial Solution PDFGary TanatoNo ratings yet
- Fluid Mechanics 1 NotesDocument127 pagesFluid Mechanics 1 NotesParas Thakur100% (2)
- Orifice and Free Jet FlowDocument4 pagesOrifice and Free Jet FlowAzooNo ratings yet
- Uscg Ship Construction Some QuestionsDocument4 pagesUscg Ship Construction Some QuestionsmhrbzkrtNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Lab Seesion No 7Document11 pagesLab Seesion No 7m.sheraz malikNo ratings yet
- LX7 - Metacentric HeightDocument8 pagesLX7 - Metacentric Heightsweet mondayNo ratings yet
- Experiment 9Document2 pagesExperiment 92022me112No ratings yet
- MI EDIT (1) Floating BodyDocument14 pagesMI EDIT (1) Floating BodydanielseleyNo ratings yet
- Stability of Floating Bodies: Hydraulic Lab Practical - 2Document7 pagesStability of Floating Bodies: Hydraulic Lab Practical - 2tarumNo ratings yet
- Experiment 4 - CATALONIA, KIMBERLY EVEDocument11 pagesExperiment 4 - CATALONIA, KIMBERLY EVEKimberly CataloniaNo ratings yet
- Laboratory 3 in HydraulicsDocument8 pagesLaboratory 3 in HydraulicsKimkate GeronimoNo ratings yet
- Cad PreschoolDocument3 pagesCad PreschoolcheskaNo ratings yet
- Philosophy of EducationDocument68 pagesPhilosophy of EducationcheskaNo ratings yet
- Philosophy of EducationDocument68 pagesPhilosophy of EducationcheskaNo ratings yet
- Management of InstructionDocument30 pagesManagement of InstructioncheskaNo ratings yet
- Plane TrigonometryDocument2 pagesPlane Trigonometrycheska100% (3)
- If A Child Lives With CriticismDocument16 pagesIf A Child Lives With Criticismcheska100% (1)
- Higher Surveying ADocument3 pagesHigher Surveying AcheskaNo ratings yet
- Monday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogDocument5 pagesMonday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogcheskaNo ratings yet
- TranspoDocument3 pagesTranspocheskaNo ratings yet
- AlgebDocument2 pagesAlgebcheskaNo ratings yet
- ELEMENTS OF A CONTRACT - WordDocument3 pagesELEMENTS OF A CONTRACT - WordcheskaNo ratings yet
- AlgebDocument2 pagesAlgebcheskaNo ratings yet
- Ce Correl Algebra (A)Document2 pagesCe Correl Algebra (A)cheskaNo ratings yet
- Simplified Construction Estimate by Max FajardoDocument5 pagesSimplified Construction Estimate by Max FajardocheskaNo ratings yet
- Elements of A Contract - WordDocument3 pagesElements of A Contract - WordcheskaNo ratings yet
- Simplified Construction Estimate by Max FajardoDocument3 pagesSimplified Construction Estimate by Max FajardoYen L50% (10)
- Discharge of ContractsDocument3 pagesDischarge of ContractscheskaNo ratings yet
- Transpo 2Document2 pagesTranspo 2cheskaNo ratings yet
- Metacentric HeightDocument18 pagesMetacentric HeightcheskaNo ratings yet
- Metacentric HeightDocument18 pagesMetacentric HeightcheskaNo ratings yet
- NotationsDocument176 pagesNotationscheskaNo ratings yet
- Wall PanelDocument27 pagesWall Panelcheska100% (1)
- 2018 - 14 Sept - Matlit Hymns - Exaltation Holy CrossDocument16 pages2018 - 14 Sept - Matlit Hymns - Exaltation Holy CrossMarguerite PaizisNo ratings yet
- Literature ReviewDocument5 pagesLiterature ReviewRochelle CampbellNo ratings yet
- Zambian Open University: School of Social Science and HumanitiesDocument9 pagesZambian Open University: School of Social Science and HumanitiesEvangelist Kabaso SydneyNo ratings yet
- 2006 Consensus Agreement On The Design and Conduct of Clinical Studies With Low-Level Laser Therapy and Light Therapy For Musculoskeletal Pain and DisordersDocument2 pages2006 Consensus Agreement On The Design and Conduct of Clinical Studies With Low-Level Laser Therapy and Light Therapy For Musculoskeletal Pain and DisordersDetian WangNo ratings yet
- WC 500029819Document23 pagesWC 500029819nsk79in@gmail.comNo ratings yet
- Detailed Lesson Plan in English I. ObjectivesDocument3 pagesDetailed Lesson Plan in English I. ObjectivesJenefer Tunares100% (1)
- Hitler. in Argentina. But No "Teutonic Conspiracy of 1000 Years". - E76Document328 pagesHitler. in Argentina. But No "Teutonic Conspiracy of 1000 Years". - E76Bruno Antonio BuikeNo ratings yet
- Jurnal Teori Pertukaran SosialDocument11 pagesJurnal Teori Pertukaran SosialRhama PutraNo ratings yet
- Rocketology ProjectDocument6 pagesRocketology ProjectJosue Grana0% (1)
- Language and Linguistics Solved MCQs (Set-1)Document6 pagesLanguage and Linguistics Solved MCQs (Set-1)Rai Zia Ur RahmanNo ratings yet
- Total English Placement TestDocument6 pagesTotal English Placement TestKaterina PapakonstantinouNo ratings yet
- SanamahismDocument7 pagesSanamahismReachingScholarsNo ratings yet
- Facebook MotionDocument24 pagesFacebook MotionDealBookNo ratings yet
- Reading Comprehension TextsDocument15 pagesReading Comprehension TextsCMRotaruNo ratings yet
- Ecdis-24 01Document4 pagesEcdis-24 01Leandro PintoNo ratings yet
- The Importance of Instructional MaterialDocument3 pagesThe Importance of Instructional MaterialJheramae SegoviaNo ratings yet
- People Vs AbellaDocument32 pagesPeople Vs AbellaKanraMendozaNo ratings yet
- FACIAL NERVE ParalysisDocument35 pagesFACIAL NERVE ParalysisIgnasNo ratings yet
- Katehi Grievance LetterDocument12 pagesKatehi Grievance LetterSacramento BeeNo ratings yet
- What Is The Delphi Method?Document2 pagesWhat Is The Delphi Method?Dunia Miqdad100% (1)
- The Best WayDocument58 pagesThe Best Wayshiela manalaysayNo ratings yet
- Deluxe SolutionDocument6 pagesDeluxe SolutionR K Patham100% (1)
- Business Statistics For Contemporary Decision Making 9th Edition Black Solutions ManualDocument25 pagesBusiness Statistics For Contemporary Decision Making 9th Edition Black Solutions ManualKevinSandovalitreNo ratings yet
- Preliminary Basic Definitions Definition: 1 GraphDocument27 pagesPreliminary Basic Definitions Definition: 1 GraphramNo ratings yet
- Behind The Scrubs: Monica Velarde Saint Mary's College December 09, 2008Document21 pagesBehind The Scrubs: Monica Velarde Saint Mary's College December 09, 2008EthanNo ratings yet
- Find and Replace in Ms WordDocument4 pagesFind and Replace in Ms WordMahroof YounasNo ratings yet
- DECLAMATIONDocument19 pagesDECLAMATIONJohn Carlos Wee67% (3)
- Prose: Jooprencess E. PonoDocument11 pagesProse: Jooprencess E. Ponoaye plazaNo ratings yet
- Supply Chain Assignment Retail SupermarketDocument20 pagesSupply Chain Assignment Retail SupermarketBNthangeniNo ratings yet
- Stetment 10 PDFDocument4 pagesStetment 10 PDFvaraprasadNo ratings yet