You might also like
- Traitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection SignalDocument48 pagesTraitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection Signaldjeddi mabrouk100% (1)
- La Sismique RéfractionDocument10 pagesLa Sismique RéfractionFatima-ezzahra laitiNo ratings yet
- Correction StatiquesDocument26 pagesCorrection StatiquesalphaidedjibrillaNo ratings yet
- Elements de Sismique II Master GC 2009Document43 pagesElements de Sismique II Master GC 2009TouriaBenKhouyaNo ratings yet
- 2018-BTS2-Diagraphie SJP ExoDocument40 pages2018-BTS2-Diagraphie SJP ExoBrigitte Aboya100% (1)
- Site PSV Chapitre 3Document15 pagesSite PSV Chapitre 3djeddimabrouk100% (4)
- Cours PDF2Document45 pagesCours PDF2api-371810067% (3)
- Corrigée Type Examen Exploration Des HydrocarburesDocument4 pagesCorrigée Type Examen Exploration Des HydrocarburesDiderNo ratings yet
- Impédance Acoustique en Sismique (Pseudo-Log D'impédance Acoustique)Document5 pagesImpédance Acoustique en Sismique (Pseudo-Log D'impédance Acoustique)djeddimabrouk67% (3)
- Electrique Chouteau 2005 PDFDocument82 pagesElectrique Chouteau 2005 PDFRakotomalala AndryNo ratings yet
- La Polarisation Spontanee (PS)Document5 pagesLa Polarisation Spontanee (PS)Kader BakourNo ratings yet
- Sismique RefractionDocument15 pagesSismique RefractionBala SowNo ratings yet
- TD N 2 Aquisition Et Traitement SismiqueDocument1 pageTD N 2 Aquisition Et Traitement SismiqueLounes RababNo ratings yet
- SupportDocument115 pagesSupportAmina OtsNo ratings yet
- Equipements SismiqueDocument16 pagesEquipements SismiquengaeNo ratings yet
- Module Geologie Pour L - IngénieurDocument135 pagesModule Geologie Pour L - IngénieurjustinoNo ratings yet
- DiagraphiesDocument2 pagesDiagraphiesGadhoumiWalid100% (2)
- Les Attributs SismiquesDocument5 pagesLes Attributs SismiquesJethro KagamaNo ratings yet
- Ondes Sismiques Enregistrees en PSVDocument6 pagesOndes Sismiques Enregistrees en PSVdjeddimabrouk50% (2)
- Tecto en RampeDocument19 pagesTecto en RampeAhmed AbdelmoumenNo ratings yet
- Acquisition Des Données Sismiques en Profil Sismique Vertical (PSV)Document5 pagesAcquisition Des Données Sismiques en Profil Sismique Vertical (PSV)djeddimabrouk83% (6)
- IMAGERIE SISMIQUE REFRACTION Fondements Théoriques, Acquisition, Traitement Et InterprétationDocument48 pagesIMAGERIE SISMIQUE REFRACTION Fondements Théoriques, Acquisition, Traitement Et Interprétationamine djeddi100% (2)
- DiagraphieDocument22 pagesDiagraphieصلاح الدين100% (1)
- DiagraphieDocument50 pagesDiagraphieMalam KadaiNo ratings yet
- Lejri Rapport SocoDocument22 pagesLejri Rapport SocoBAKALA IGNANGA VANESSANo ratings yet
- Aperçu Sur Les Diagraphies DifféréesDocument21 pagesAperçu Sur Les Diagraphies DifféréesMehdi Selmane100% (1)
- Divergence Spherique Et Absorption Des Ondes SismiquesDocument11 pagesDivergence Spherique Et Absorption Des Ondes Sismiquesdjeddimabrouk100% (5)
- Résumé Bael 2015Document4 pagesRésumé Bael 2015Mustafa MostafaNo ratings yet
- Acquisition Et Traitement de Profils SismiquesDocument9 pagesAcquisition Et Traitement de Profils SismiquesNadjm Eddine BenbouzidNo ratings yet
- ENPA - Cours PDFDocument109 pagesENPA - Cours PDFBlack JiadaNo ratings yet
- Rapport Terrain Béjà Bni MtirDocument38 pagesRapport Terrain Béjà Bni Mtirjalel78No ratings yet
- Diagraphies Aquifères 2019Document48 pagesDiagraphies Aquifères 2019fethi aissa ouissiNo ratings yet
- Cours N°2 - GéophysiqueDocument69 pagesCours N°2 - GéophysiquearachidNo ratings yet
- TP Log PS Module DiagraphieDocument9 pagesTP Log PS Module DiagraphieAdel DokmaNo ratings yet
- Aperçu Sur Les Diagraphies Différées PDFDocument21 pagesAperçu Sur Les Diagraphies Différées PDFMehdi SelmaneNo ratings yet
- KrigeageDocument46 pagesKrigeageAlice BubléNo ratings yet
- Cours Geologie Du Reservoir Iet I IDocument133 pagesCours Geologie Du Reservoir Iet I Icoco100% (4)
- Etude Gravimetrique de La Metidja OrientaleDocument93 pagesEtude Gravimetrique de La Metidja Orientalekarim yaiciNo ratings yet
- Sedimento Stratification Terminologie PDFDocument27 pagesSedimento Stratification Terminologie PDFAli BoubeniaNo ratings yet
- Sismique de PuitDocument43 pagesSismique de Puitharouna souley hegaNo ratings yet
- Réservoir GréseuxDocument54 pagesRéservoir Gréseuxmoussa mrzgNo ratings yet
- Geot1s7 Le GisementDocument19 pagesGeot1s7 Le GisementabdouNo ratings yet
- Perméabilité CoursDocument17 pagesPerméabilité CoursMohamed DiopNo ratings yet
- La Cartographie SismiqueDocument17 pagesLa Cartographie Sismiquejonathan ndam100% (1)
- Methode Sondage Electrique - 2Document4 pagesMethode Sondage Electrique - 2aliloukh1986No ratings yet
- Chapitre Iv: Piezometrie Des NappesDocument7 pagesChapitre Iv: Piezometrie Des NappesSabri NaNo ratings yet
- Gravi Isostasie 2017Document36 pagesGravi Isostasie 2017houdaNo ratings yet
- Support Gravimetrie STU S5 2020-2021 - CopieDocument28 pagesSupport Gravimetrie STU S5 2020-2021 - Copiemohammed LautfiNo ratings yet
- Cours Geologie Pour L'ingenieur Ensam 2019Document41 pagesCours Geologie Pour L'ingenieur Ensam 2019Abdelali Bouassal100% (1)
- Traitement Numerique Du Signal Sismique Reflexion Partie IIDocument71 pagesTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukNo ratings yet
- Guide Methodes Geophysiques Detection Objets Sites Pollues 2017Document129 pagesGuide Methodes Geophysiques Detection Objets Sites Pollues 2017Hind HindouNo ratings yet
- 2-2 Methode Sismique Refraction: PrincipeDocument5 pages2-2 Methode Sismique Refraction: PrincipeYoucef AzzouziNo ratings yet
- Exercices Krigeage PDFDocument9 pagesExercices Krigeage PDFlepro brunelNo ratings yet
- Prospection Géophysique Principe PDFDocument14 pagesProspection Géophysique Principe PDFYohann Offant100% (4)
- Études sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneFrom EverandÉtudes sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneNo ratings yet
- La Terre, sa formation et sa constitution actuelleFrom EverandLa Terre, sa formation et sa constitution actuelleNo ratings yet
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueFrom EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueNo ratings yet
- Évolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteFrom EverandÉvolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteNo ratings yet
- Traitement Numerique Du Signal Sismique Reflexion Partie IIDocument71 pagesTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukNo ratings yet
- Diagraphies Différées Et InterprétationDocument48 pagesDiagraphies Différées Et Interprétationdjeddi mabrouk100% (2)
- Traitement Numerique Du Signal Sismique Reflexion Partie IIDocument71 pagesTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukNo ratings yet
- Propagation Des Ondes SismiquesDocument19 pagesPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- Traitement Numerique Du Signal Sismique Reflexion Partie IIDocument71 pagesTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukNo ratings yet
- Sismique Reflexion Et Refraction: Les Principes de BaseDocument47 pagesSismique Reflexion Et Refraction: Les Principes de Basedjeddi mabrouk86% (7)
- Sismique Réflexion: FondementsDocument43 pagesSismique Réflexion: Fondementsdjeddi mabrouk100% (10)
- Methodes Sismiques. Comportement Élastique Des RochesDocument15 pagesMethodes Sismiques. Comportement Élastique Des Rochesdjeddi mabrouk88% (8)
- Les Principes Fondamentaux de Propagation Des Ondes SismiquesDocument26 pagesLes Principes Fondamentaux de Propagation Des Ondes Sismiquesdjeddi mabrouk100% (5)
- Principe Des Methodes ElectromagnetiquesDocument7 pagesPrincipe Des Methodes Electromagnetiquesdjeddi mabrouk92% (12)
- Méthode Electromagnétique SlingramDocument10 pagesMéthode Electromagnétique Slingramdjeddi mabrouk100% (4)
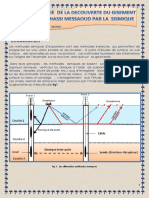
- Bref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La SismiqueDocument8 pagesBref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La Sismiquedjeddi mabrouk100% (3)
- Contexte Geodynamique, Tectonique Et Sismologique Du Nord Oriental de L'algerieDocument63 pagesContexte Geodynamique, Tectonique Et Sismologique Du Nord Oriental de L'algeriedjeddi mabrouk100% (5)
- Prospection Tellurique Et MagnetotelluriqueDocument19 pagesProspection Tellurique Et Magnetotelluriquedjeddi mabrouk100% (5)
- Magnétotellurique: Relation Fondamentale (Formule de Cagniard)Document29 pagesMagnétotellurique: Relation Fondamentale (Formule de Cagniard)djeddi mabrouk91% (11)
- Chapitre I: Diagraphies Sonique Et AcoustiqueDocument13 pagesChapitre I: Diagraphies Sonique Et Acoustiquedjeddimabrouk88% (16)
- Site PSV Chapitre 3Document15 pagesSite PSV Chapitre 3djeddimabrouk100% (4)
- RayonnementDocument29 pagesRayonnementBibliothèque Al-itkanNo ratings yet
- Klubprepa Extrait 4760Document4 pagesKlubprepa Extrait 4760Mimita Lafleur100% (1)
- Cours Convection Iup3Document36 pagesCours Convection Iup3CELASSENo ratings yet
- Chapitre 4 Les Principes de La TD (I)Document36 pagesChapitre 4 Les Principes de La TD (I)Thizmaith LionaNo ratings yet
- Bernou PDFDocument1 pageBernou PDFAbdelwahab.gfNo ratings yet
- Béton PrécontraintDocument81 pagesBéton PrécontraintAbdellahNo ratings yet
- Université Abdelamelk Essâadi Année 2020/20121 Faculté Des Sciences Tétouan Filière Sma Et Smi (S1)Document2 pagesUniversité Abdelamelk Essâadi Année 2020/20121 Faculté Des Sciences Tétouan Filière Sma Et Smi (S1)AYOUB ADILNo ratings yet
- La RésilienceDocument3 pagesLa Résiliencefarhatbaha203No ratings yet
- Rapport tp4Document9 pagesRapport tp4PFENo ratings yet
- Activités Sã©ismes Et Structure Interne Terre Groupe FE SVT 2022 2023Document2 pagesActivités Sã©ismes Et Structure Interne Terre Groupe FE SVT 2022 2023بلا 'لNo ratings yet
- Sf033a FR EuDocument6 pagesSf033a FR EuBeny AbdouNo ratings yet
- Resistance Au Flambement D'un Poteau Bi-Articule Avec Maintiens Lateraux IntermediairesDocument5 pagesResistance Au Flambement D'un Poteau Bi-Articule Avec Maintiens Lateraux IntermediairesmohsenNo ratings yet
- Transport Des Hydrocarbures ch2Document28 pagesTransport Des Hydrocarbures ch2abdouNo ratings yet
- Etude Dimensionnement Pompe Boue Triplex BMPT 1600-Acr-7 5X12Document84 pagesEtude Dimensionnement Pompe Boue Triplex BMPT 1600-Acr-7 5X12cristi.nicolaehotmail.comNo ratings yet
- Cours - Construction Métallique - 1 - Chapitre - 2 - Eléments Comprimés Et TendusDocument32 pagesCours - Construction Métallique - 1 - Chapitre - 2 - Eléments Comprimés Et TendusMezniNo ratings yet
- Exercices - L'énergie CinétiqueDocument6 pagesExercices - L'énergie CinétiqueNana DiakitéNo ratings yet
- BAEL Application Règles Béton Armé États Limites BAEL AC CTTP-BTP-CTTP-1Document110 pagesBAEL Application Règles Béton Armé États Limites BAEL AC CTTP-BTP-CTTP-1Run NerNo ratings yet
- Cours PMC316 - Mecanique Des FluidesDocument94 pagesCours PMC316 - Mecanique Des FluidesMilley's Chacha100% (2)
- Composants Métalliques Fléchis - Assemblages1Document18 pagesComposants Métalliques Fléchis - Assemblages1Said Mansour MohamedNo ratings yet
- Polymf 04Document207 pagesPolymf 04bigmiloud100% (1)
- Notions GéologieDocument5 pagesNotions GéologiehajarNo ratings yet
- MecaCADChap4 (CinematiqueExSup) PDFDocument5 pagesMecaCADChap4 (CinematiqueExSup) PDFhamzaNo ratings yet
- اعطال KCE الجديدDocument196 pagesاعطال KCE الجديدMustapha BandouNo ratings yet
- Cours Thermochime 2022 2023Document59 pagesCours Thermochime 2022 2023Ayoub IchfiNo ratings yet
- Annexeh Relation Pression Vitesse VentDocument3 pagesAnnexeh Relation Pression Vitesse VentmlamourNo ratings yet
- PDM - Table Des MatieresDocument8 pagesPDM - Table Des MatieresdominiqueNo ratings yet
- TD4 ThermoDocument3 pagesTD4 ThermoYoussef BensaidNo ratings yet
- Fiche de Cours Chapitre 1 - Ondes SonoresDocument2 pagesFiche de Cours Chapitre 1 - Ondes Sonoresikram.bchatnia-eNo ratings yet
- Calcul BADocument5 pagesCalcul BAHamouda ZitouniNo ratings yet