You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Aggreko - 100kW User Manual PDFDocument103 pagesAggreko - 100kW User Manual PDFrosemberg_trujillo100% (1)
- Std-I EvsDocument9 pagesStd-I EvsAnonymous QIuAGIadXmNo ratings yet
- Std-I EvsDocument9 pagesStd-I EvsAnonymous QIuAGIadXmNo ratings yet
- Periyar Centenary Memorial Matric Higher Secondary School-Trichy-21 STD: Iii Sub: ScienceDocument9 pagesPeriyar Centenary Memorial Matric Higher Secondary School-Trichy-21 STD: Iii Sub: ScienceAnonymous QIuAGIadXmNo ratings yet
- Linux User ManualDocument19 pagesLinux User ManualAnonymous QIuAGIadXmNo ratings yet
- USE Master GO Alter Database SET GO: BPO EmergencyDocument2 pagesUSE Master GO Alter Database SET GO: BPO EmergencyAnonymous QIuAGIadXmNo ratings yet
- Density-based traffic light control using ArduinoDocument2 pagesDensity-based traffic light control using ArduinoAnonymous QIuAGIadXmNo ratings yet
- Periyar Centenary Memorial Matric Higher Secondary School-Trichy-21 STD: Iii Sub: ScienceDocument9 pagesPeriyar Centenary Memorial Matric Higher Secondary School-Trichy-21 STD: Iii Sub: ScienceAnonymous QIuAGIadXmNo ratings yet
- 3rd STD Science Guide - Term 2 - EM - SampleDocument8 pages3rd STD Science Guide - Term 2 - EM - SampleAnonymous QIuAGIadXmNo ratings yet
- 7867827677Document12 pages7867827677Anonymous QIuAGIadXmNo ratings yet
- AbstractDocument12 pagesAbstractAnonymous QIuAGIadXmNo ratings yet
- VR Mount1Document102 pagesVR Mount1Anonymous QIuAGIadXmNo ratings yet
- Table of ContentDocument49 pagesTable of ContentAnonymous QIuAGIadXmNo ratings yet
- Car SCRNDocument3 pagesCar SCRNAnonymous QIuAGIadXmNo ratings yet
- SensorsDocument34 pagesSensorsAnonymous QIuAGIadXmNo ratings yet
- Hawthorne TheoryDocument10 pagesHawthorne Theoryssmame100% (1)
- 2015 - 2016 Ieee Bulk Project TitlesDocument5 pages2015 - 2016 Ieee Bulk Project TitlesAnonymous QIuAGIadXmNo ratings yet
- Forest2.mcppi CallertableDocument2 pagesForest2.mcppi CallertableAnonymous QIuAGIadXmNo ratings yet
- 123Document60 pages123Anonymous QIuAGIadXmNo ratings yet
- IncludeDocument4 pagesIncludeAnonymous QIuAGIadXmNo ratings yet
- AbstractDocument2 pagesAbstractAnonymous QIuAGIadXmNo ratings yet
- Ece Dept: (Decade Resistance Box) - 1Document1 pageEce Dept: (Decade Resistance Box) - 1Anonymous QIuAGIadXmNo ratings yet
- ProgramDocument25 pagesProgramMohit KumarNo ratings yet
- Matlab TutorialDocument243 pagesMatlab TutorialPinaki Mishra100% (4)
- First Robotic SPECT For Minimally Invasive Sentinel Lymph Node MappingDocument3 pagesFirst Robotic SPECT For Minimally Invasive Sentinel Lymph Node MappingAnonymous QIuAGIadXmNo ratings yet
- LifiDocument21 pagesLifiAnonymous QIuAGIadXmNo ratings yet
- NameDocument89 pagesNameAnonymous QIuAGIadXmNo ratings yet
- Junior ScientistDocument2 pagesJunior ScientistAnonymous QIuAGIadXmNo ratings yet
- Manually Operated Aerobic Rice Drum SeederDocument3 pagesManually Operated Aerobic Rice Drum SeederAnonymous QIuAGIadXmNo ratings yet
- Android SyllabusDocument2 pagesAndroid SyllabusAnonymous QIuAGIadXmNo ratings yet
- Ae 9000 BM - Engy Users Manual - 26.8.2015Document15 pagesAe 9000 BM - Engy Users Manual - 26.8.2015Chirag ChawdaNo ratings yet
- Siemens Technical Education Program STEP - Basics of ElectricityDocument56 pagesSiemens Technical Education Program STEP - Basics of ElectricityFábio Carvalho Furtado100% (2)
- POWER COMPUTATIONS FOR NONSINUSOIDAL WAVEFORMSDocument43 pagesPOWER COMPUTATIONS FOR NONSINUSOIDAL WAVEFORMSSyed AfzalNo ratings yet
- Group 1 Compilation of Quizes and ReviewerDocument40 pagesGroup 1 Compilation of Quizes and ReviewerCatherine PalarcaNo ratings yet
- Power & Data Logging Instrumentation: Omnicontrols, IncDocument11 pagesPower & Data Logging Instrumentation: Omnicontrols, IncZul AtfiNo ratings yet
- Virtual Synchronous MachineDocument6 pagesVirtual Synchronous MachineAndyNo ratings yet
- BTT TestDocument47 pagesBTT TestArun BirlaNo ratings yet
- Traction Metering Comprehensive PDFDocument16 pagesTraction Metering Comprehensive PDFnamitaNo ratings yet
- Ena Lab 6 PDF (Modify) 2Document6 pagesEna Lab 6 PDF (Modify) 2Mudasser ZiaNo ratings yet
- Steady State Single Phase AC Circuit AnalysisDocument85 pagesSteady State Single Phase AC Circuit AnalysisHenok DerejeNo ratings yet
- Acuvim II Multifunction Power Energy Meter Brochure DatasheetDocument18 pagesAcuvim II Multifunction Power Energy Meter Brochure DatasheetKonan ClovisNo ratings yet
- Be & Ca PDFDocument45 pagesBe & Ca PDFRonimack Trajano de SouzaNo ratings yet
- Coordinated AVR and Tap Changing Control For An Autonomous Industrial Power SystemDocument7 pagesCoordinated AVR and Tap Changing Control For An Autonomous Industrial Power SystemWakdol LahNo ratings yet
- On Control Schemes For Grid-Forming InvertersDocument7 pagesOn Control Schemes For Grid-Forming InvertersjigsaiNo ratings yet
- 2015 PVMRW 129 HuqueDocument13 pages2015 PVMRW 129 Huqueسيد الخواتمNo ratings yet
- VAMP 210: Generator Protection RelayDocument320 pagesVAMP 210: Generator Protection RelayharisNo ratings yet
- 1030709222496Document184 pages1030709222496medidas012100% (1)
- Investigation of reverse power flow requirements of high penetrations of small-scale embedded generationDocument7 pagesInvestigation of reverse power flow requirements of high penetrations of small-scale embedded generationengkankwNo ratings yet
- WWW - Manaresults.Co - In: Set No. 1Document8 pagesWWW - Manaresults.Co - In: Set No. 1S.BASKARNo ratings yet
- Power Factor Correction CalculatorDocument33 pagesPower Factor Correction CalculatormetadelNo ratings yet
- Control of Power Converters in AC Microgrids PDFDocument16 pagesControl of Power Converters in AC Microgrids PDFkrishna ReddyNo ratings yet
- Control Loops in power systemsDocument22 pagesControl Loops in power systemsMuntadher AbbasNo ratings yet
- Formulas For Predicting The Dynamic Performance ofROCOF Relays For Embedded Generation ApplicationsDocument9 pagesFormulas For Predicting The Dynamic Performance ofROCOF Relays For Embedded Generation Applicationsrafik1995No ratings yet
- AC CIRCUIT Power AnalysisDocument48 pagesAC CIRCUIT Power AnalysisFerrer Francia Nel SabasNo ratings yet
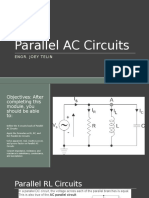
- Parallel AC Circuits SPLPDocument47 pagesParallel AC Circuits SPLPJoey TelinNo ratings yet
- REDD: A Public Data Set For Energy Disaggregation Research: J. Zico Kolter Matthew J. JohnsonDocument6 pagesREDD: A Public Data Set For Energy Disaggregation Research: J. Zico Kolter Matthew J. JohnsonshamimshawonNo ratings yet
- 825 pp011 - en PDocument8 pages825 pp011 - en PPedroMirandaCarmoNo ratings yet
- 7SR11 and 7SR12 Argus: Answers For EnergyDocument20 pages7SR11 and 7SR12 Argus: Answers For EnergyRafael GonçalvesNo ratings yet