You might also like
- Automatic Railway Gate Control SystemDocument4 pagesAutomatic Railway Gate Control SystemyeshanbelmitikieNo ratings yet
- Auto Pilot Security System For Railway Gates Using LabviewDocument4 pagesAuto Pilot Security System For Railway Gates Using LabviewPrudhvi BarmaNo ratings yet
- Automatic Railway Gate ControlDocument14 pagesAutomatic Railway Gate Controlapi-26871643100% (23)
- ServoDocument7 pagesServohaaenNo ratings yet
- Automatic Railway Gate Control System Is A Simple But Very Useful ProjectDocument6 pagesAutomatic Railway Gate Control System Is A Simple But Very Useful ProjectAditya WardhaNo ratings yet
- Design Document1Document9 pagesDesign Document1Osama YahyaNo ratings yet
- Construction and Output Video Principle of OperationDocument13 pagesConstruction and Output Video Principle of OperationswaarnNo ratings yet
- Automatic Control of Railway Gate & ControlDocument88 pagesAutomatic Control of Railway Gate & Controlyogananda93% (14)
- AUTOMATIC RAILWAY GATE & TRACK SWITCH CONTROLDocument5 pagesAUTOMATIC RAILWAY GATE & TRACK SWITCH CONTROLGaurav AaryaNo ratings yet
- PLC Railways Accident Avoiding SystemDocument4 pagesPLC Railways Accident Avoiding SystemNivedhan Gandhi100% (2)
- Automatic Railway Gate ControllerDocument10 pagesAutomatic Railway Gate ControllerKoushik MaityNo ratings yet
- Assignment 1 Technology SensorDocument12 pagesAssignment 1 Technology SensorMuhammad Sufi MustafaNo ratings yet
- Automatic Railway Gate Controller by Using AT89C51Document7 pagesAutomatic Railway Gate Controller by Using AT89C51archerselevatorsNo ratings yet
- DC Motor Control Using Arduino: 1) IntroductionDocument10 pagesDC Motor Control Using Arduino: 1) IntroductionSoeAyeNo ratings yet
- Report For ProjectDocument8 pagesReport For ProjectE.GIRIJESHNo ratings yet
- Railway Gate Control SystemDocument3 pagesRailway Gate Control Systemnaveen patangayNo ratings yet
- Automatic Railway Gate ControllerDocument32 pagesAutomatic Railway Gate ControllerKaos Polos NakiraNo ratings yet
- This BlogDocument6 pagesThis BlogRifad PradhanNo ratings yet
- Rail Track Safety MonitoringDocument7 pagesRail Track Safety MonitoringNarayan PradhanNo ratings yet
- Penggerak Servo Untuk CCTVDocument5 pagesPenggerak Servo Untuk CCTVDoniNo ratings yet
- Sem 7 Conference PaperDocument4 pagesSem 7 Conference PaperAmey SawantNo ratings yet
- Automatic Gate ControlDocument13 pagesAutomatic Gate ControlMonik MishraNo ratings yet
- Automatic railway gate control using PLCDocument5 pagesAutomatic railway gate control using PLCS.m. Salahuddin100% (1)
- Servomechanism: Application of Servo MechanismDocument6 pagesServomechanism: Application of Servo MechanismJawad SandhuNo ratings yet
- RF Seeker Stabilisation AntenneDocument4 pagesRF Seeker Stabilisation AntennetttNo ratings yet
- Train Collision Avoidance Using Sensors & PLCDocument4 pagesTrain Collision Avoidance Using Sensors & PLCLovey SalujaNo ratings yet
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaNo ratings yet
- Chapter 3 Position, Speed and Acceleration MeasurementDocument18 pagesChapter 3 Position, Speed and Acceleration MeasurementMohamed ZahranNo ratings yet
- Automatic Railway Gate ControlDocument4 pagesAutomatic Railway Gate Controlallam rajenderNo ratings yet
- How Servo Motors Work to Rotate Objects PreciselyDocument1 pageHow Servo Motors Work to Rotate Objects PreciselyMilanNo ratings yet
- Q3 Reviewer Computer9Document9 pagesQ3 Reviewer Computer9ThesNo ratings yet
- Brief Guide to RC ServosDocument7 pagesBrief Guide to RC ServosRodrigo OrtizNo ratings yet
- Rain Sensing Automatic Car Wiper: Block DiagramDocument5 pagesRain Sensing Automatic Car Wiper: Block DiagramKavinNo ratings yet
- Accelerometers Versus Velocity Sensors - What's The Difference 2Document1 pageAccelerometers Versus Velocity Sensors - What's The Difference 2Nelson Arul NathanNo ratings yet
- Evolution of Railway Track Crack Detection System: Abstract - in This Paper, We Have Established IntoDocument6 pagesEvolution of Railway Track Crack Detection System: Abstract - in This Paper, We Have Established IntoAnusha AnuNo ratings yet
- 5 +alDocument8 pages5 +alyupitaa00No ratings yet
- Smart Automation in Railway System: Arundas M H, Nikhil Babu T S, Lijo K JDocument5 pagesSmart Automation in Railway System: Arundas M H, Nikhil Babu T S, Lijo K JerodeiframeNo ratings yet
- Vehicle Speed Sensors Types of VSSDocument5 pagesVehicle Speed Sensors Types of VSSKumar Saket100% (1)
- Rotate servo motor according to X, Y coordinatesDocument3 pagesRotate servo motor according to X, Y coordinatespradnya sadigaleNo ratings yet
- Rotate servo motor according to X, Y coordinatesDocument3 pagesRotate servo motor according to X, Y coordinatespradnya sadigaleNo ratings yet
- Vobot-Micro Servo ArmDocument17 pagesVobot-Micro Servo ArmAnonymous YvtvLWNNo ratings yet
- Railway ProjectDocument35 pagesRailway ProjectsingamNo ratings yet
- A Review - Automatic Railway Gate Control System: Shubham Shrirao, Dinesh RojatkarDocument4 pagesA Review - Automatic Railway Gate Control System: Shubham Shrirao, Dinesh RojatkarJohnsonNo ratings yet
- Automatic Speed Control and Accident Avoidance of Vehicle UsingDocument34 pagesAutomatic Speed Control and Accident Avoidance of Vehicle UsingK HariNo ratings yet
- Automatic Railway Gate Control and Track Switching: Rajat Kumar Singh, Tanu SachdevaDocument6 pagesAutomatic Railway Gate Control and Track Switching: Rajat Kumar Singh, Tanu SachdevaAastiNo ratings yet
- PLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceDocument3 pagesPLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceAliNo ratings yet
- Servo Motor WorkDocument3 pagesServo Motor WorkNaveedNo ratings yet
- ServomechanismDocument4 pagesServomechanismJermaine StrachanNo ratings yet
- Line Follower Robot Mini ProjectDocument39 pagesLine Follower Robot Mini ProjectPrem KumarNo ratings yet
- Robotic Arm: Team MembersDocument9 pagesRobotic Arm: Team MembersShubham KaushikNo ratings yet
- AmbulanceDocument6 pagesAmbulanceRitzz GuptaNo ratings yet
- International Journal of Chemtech ResearchDocument8 pagesInternational Journal of Chemtech ResearchSONUNo ratings yet
- Project Report On Automatic Railway GateDocument11 pagesProject Report On Automatic Railway Gatemohitsaha61974No ratings yet
- Automatic Railway Gate Control Using IR SensorsDocument11 pagesAutomatic Railway Gate Control Using IR SensorsSrijan AgrawalNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Amateur Radio Electronics on Your MobileFrom EverandAmateur Radio Electronics on Your MobileRating: 5 out of 5 stars5/5 (1)
- Godwin Okebaram Uwah - Pirandellism and Samuel Beckett's Plays (Scripta Humanistica, Volume 48) (1989)Document147 pagesGodwin Okebaram Uwah - Pirandellism and Samuel Beckett's Plays (Scripta Humanistica, Volume 48) (1989)AniNo ratings yet
- Audio Transformers Chapter PDFDocument30 pagesAudio Transformers Chapter PDFstion100% (1)
- Smith ChartDocument14 pagesSmith ChartEmiaj LabampaNo ratings yet
- 3D153 - Volume 2Document208 pages3D153 - Volume 2T HurtNo ratings yet
- IFR En Route Charts Guide PilotsDocument28 pagesIFR En Route Charts Guide PilotsNick Tsang100% (1)
- 19J M100 19J M100S, 19J M150 CJ19M10,20J M100, CJ20M10 20MJ10Document29 pages19J M100 19J M100S, 19J M150 CJ19M10,20J M100, CJ20M10 20MJ10Marco VegaNo ratings yet
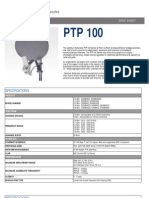
- Cambium Networks PTP 100 SpecificationDocument2 pagesCambium Networks PTP 100 SpecificationMuliawan HenochNo ratings yet
- YAMAHA YAS-62 ManualDocument12 pagesYAMAHA YAS-62 ManualTimikiti JaronitiNo ratings yet
- E! For The YAMAHA DX7II SeriesDocument62 pagesE! For The YAMAHA DX7II SeriesCristobalzqNo ratings yet
- Shout Out to My ExDocument3 pagesShout Out to My ExgeneNo ratings yet
- Song The Show Must Go On Queen Activities With Music Songs Nursery Rhymes Video M - 4781Document2 pagesSong The Show Must Go On Queen Activities With Music Songs Nursery Rhymes Video M - 4781miriamNo ratings yet
- Jazz - ArticulationDocument1 pageJazz - ArticulationPaola di santoNo ratings yet
- History: Torakusu YamahaDocument4 pagesHistory: Torakusu Yamahaxicecec166No ratings yet
- Project Report - On Videocon d2hDocument71 pagesProject Report - On Videocon d2hvarunkatara33% (3)
- Ganesh Automobiles price list and order formDocument13 pagesGanesh Automobiles price list and order formSiddharth HandaNo ratings yet
- Kiev City Guide Online Travel Guide To Kyiv Ipaper Download PDFDocument56 pagesKiev City Guide Online Travel Guide To Kyiv Ipaper Download PDFChris Sk100% (1)
- Aqu4518r21 PDFDocument2 pagesAqu4518r21 PDFBian HardiyantoNo ratings yet
- Line Coding TechniquesDocument14 pagesLine Coding TechniquesAkshita GuptaNo ratings yet
- Fate Index Sorted by Subject Then Year Then MonthDocument794 pagesFate Index Sorted by Subject Then Year Then MonthDharmaMaya Chandrahas100% (1)
- Ams DMX 15-80 S ManualDocument16 pagesAms DMX 15-80 S ManualPaul MestreNo ratings yet
- Interfacing GPS With Graphic LCD Using 8051 MicrocontrollerDocument49 pagesInterfacing GPS With Graphic LCD Using 8051 MicrocontrollerManoj KavediaNo ratings yet
- PianoFiles Sheet Music CollectionDocument13 pagesPianoFiles Sheet Music CollectionChris Ruggere33% (3)
- Academy Travel Tour Program January To December 2020Document100 pagesAcademy Travel Tour Program January To December 2020dieschnelleNo ratings yet
- Revision For The First 1 English 8Document6 pagesRevision For The First 1 English 8hiidaxneee urrrmNo ratings yet
- ALR Compact Repeater - Installation and Service Manual - 044 - 05252 Rev A February 2007Document54 pagesALR Compact Repeater - Installation and Service Manual - 044 - 05252 Rev A February 2007Virgil PeiulescuNo ratings yet
- Vivaldi's Gloria RV 589 ScoreDocument80 pagesVivaldi's Gloria RV 589 ScoreDenis costaNo ratings yet
- LC 26d4uDocument108 pagesLC 26d4ujdskes100% (1)
- Anthology of Harmonica TuningsDocument68 pagesAnthology of Harmonica TuningsGodwin AriwodoNo ratings yet
- Peabody Piano Repertoire List PDFDocument10 pagesPeabody Piano Repertoire List PDFClement Acevedo100% (2)
- Chai Tapri - Office Ke Saamne Set Up Harish - Dinesh Sonu - PawanDocument8 pagesChai Tapri - Office Ke Saamne Set Up Harish - Dinesh Sonu - PawanBibhanshu RaiNo ratings yet