You might also like
- R/Rpad Reference Card: Slicing and Extracting DataDocument5 pagesR/Rpad Reference Card: Slicing and Extracting Datanikhil4tpNo ratings yet
- Calculus Maple PDFDocument328 pagesCalculus Maple PDFruslanagNo ratings yet
- ML - Lab - Classifiers BLANK PDFDocument68 pagesML - Lab - Classifiers BLANK PDFAndy willNo ratings yet
- Bayesian ProgrammingDocument208 pagesBayesian Programmingkenshi nitooNo ratings yet
- Ordinal and Multinomial ModelsDocument58 pagesOrdinal and Multinomial ModelsSuhel Ahmad100% (1)
- Probability TheoryDocument68 pagesProbability TheoryRohit AroraNo ratings yet
- R Markdown: The Definitive Guide: Yihui Xie, J. J. Allaire, Garrett GrolemundDocument123 pagesR Markdown: The Definitive Guide: Yihui Xie, J. J. Allaire, Garrett GrolemundVishnu RaghavanNo ratings yet
- Generating Permutations From Factoradic NumbersDocument6 pagesGenerating Permutations From Factoradic NumbersJoel GuilhermeNo ratings yet
- Propagation of Transient Elastic Waves in Stratified Anisotropic MediaFrom EverandPropagation of Transient Elastic Waves in Stratified Anisotropic MediaNo ratings yet
- Order Statistics & Inference: Estimation MethodsFrom EverandOrder Statistics & Inference: Estimation MethodsNo ratings yet
- Universiteit Hasselt Concepts in Bayesian Inference Exam June 2015Document8 pagesUniversiteit Hasselt Concepts in Bayesian Inference Exam June 2015Nina MorgensternNo ratings yet
- App.A - Detection and Estimation in Additive Gaussian Noise PDFDocument55 pagesApp.A - Detection and Estimation in Additive Gaussian Noise PDFLê Dương LongNo ratings yet
- Survival Analysis: Ani KatchovaDocument10 pagesSurvival Analysis: Ani KatchovaShahabuddin ProdhanNo ratings yet
- Peter Dueben: Royal Society University Research Fellow & ECMWF's Coordinator For Machine Learning and AI ActivitiesDocument33 pagesPeter Dueben: Royal Society University Research Fellow & ECMWF's Coordinator For Machine Learning and AI ActivitiesRizky Hamdani Sakti100% (1)
- On Measures of Entropy and InformationDocument18 pagesOn Measures of Entropy and Informationyounge994No ratings yet
- RELU and OthersDocument19 pagesRELU and OthersPRATIK GANGAPURWALANo ratings yet
- Bioinformatics Exercises PrintDocument6 pagesBioinformatics Exercises Printalem010No ratings yet
- 1 Lyapunov Stability TheoryDocument11 pages1 Lyapunov Stability TheoryajmaltkNo ratings yet
- Stata 4dummiesDocument12 pagesStata 4dummiesPablo CostillaNo ratings yet
- Basic Iterative Methods For Solving Linear Systems PDFDocument33 pagesBasic Iterative Methods For Solving Linear Systems PDFradoevNo ratings yet
- BayesforbeginnersDocument21 pagesBayesforbeginnersapi-284811969No ratings yet
- An Overview of Toxicogenomics: Curr. Issues Mol. Biol. (2002) 4: 45-56Document12 pagesAn Overview of Toxicogenomics: Curr. Issues Mol. Biol. (2002) 4: 45-56Kumar SwamyNo ratings yet
- Bioinformatics F& M 20100722 BujakDocument27 pagesBioinformatics F& M 20100722 BujakEdward Bujak100% (1)
- SAS Programming For Data Mining: AUC Calculation Using Wilcoxon Rank Sum TestDocument8 pagesSAS Programming For Data Mining: AUC Calculation Using Wilcoxon Rank Sum TestJennifer ParkerNo ratings yet
- Likelihood Ratio TestDocument6 pagesLikelihood Ratio TestBernard OkpeNo ratings yet
- Stata PresentacionDocument109 pagesStata PresentacionJoab Dan Valdivia CoriaNo ratings yet
- CHAPTER 01 - Basics of Coding TheoryDocument36 pagesCHAPTER 01 - Basics of Coding TheorySundui BatbayarNo ratings yet
- Bayes Estimation: January 20, 2006Document7 pagesBayes Estimation: January 20, 2006edson alvarezNo ratings yet
- Course Notes Math 146Document10 pagesCourse Notes Math 146user2357No ratings yet
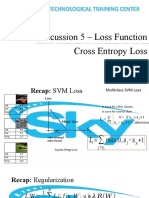
- Discussion 5 - Cross Entropy Loss - AnnotatedDocument10 pagesDiscussion 5 - Cross Entropy Loss - AnnotatedThinkers InstituteNo ratings yet
- J. P. Lasalle - Paper Original - An Invariance Principle in The Theory of Stability (1966)Document20 pagesJ. P. Lasalle - Paper Original - An Invariance Principle in The Theory of Stability (1966)Ruben HdzNo ratings yet
- Measures On Metric Spaces and Their Weak ConvergenceDocument17 pagesMeasures On Metric Spaces and Their Weak ConvergencepieropieruNo ratings yet
- Compositional Analysis of Spider SilkDocument60 pagesCompositional Analysis of Spider SilkrajrudrapaaNo ratings yet
- CDS NW Synthesis and Characterization.12Document22 pagesCDS NW Synthesis and Characterization.12ebujak100% (1)
- 04 Notes 6250 f13Document16 pages04 Notes 6250 f13uranub27870% (1)
- Clojure For Machine Learning: Chapter No. 1 "Working With Matrices"Document38 pagesClojure For Machine Learning: Chapter No. 1 "Working With Matrices"Packt PublishingNo ratings yet
- Neural Networks in Data MiningDocument5 pagesNeural Networks in Data MiningBoobalan RNo ratings yet
- Isochronous PotentialsDocument11 pagesIsochronous Potentialsdertweasr100% (1)
- Doob, The Development of Rigor in Mathematical Probability (1900-1950) PDFDocument11 pagesDoob, The Development of Rigor in Mathematical Probability (1900-1950) PDFFardadPouranNo ratings yet
- Neural Networks EconomicsDocument27 pagesNeural Networks EconomicskodecelNo ratings yet
- A Beginner's Notes On Bayesian Econometrics (Art)Document21 pagesA Beginner's Notes On Bayesian Econometrics (Art)amerdNo ratings yet
- Abstract Booklet - Undergraduate ConferenceDocument40 pagesAbstract Booklet - Undergraduate ConferenceRobertNo ratings yet
- Handbook Bio StatDocument305 pagesHandbook Bio StatADWINDT100% (1)
- Comparison of Id3, Fuzzy Id3 and Probabilistic Id3 Algorithms in The Evaluation of Learning AchievementsDocument5 pagesComparison of Id3, Fuzzy Id3 and Probabilistic Id3 Algorithms in The Evaluation of Learning AchievementsJournal of Computing100% (1)
- TensorFlow With RDocument46 pagesTensorFlow With RbiondimiNo ratings yet
- OrdinalexampleR PDFDocument9 pagesOrdinalexampleR PDFDamon CopelandNo ratings yet
- Deep Learning Mysteries - Aravind AriharasudhanDocument129 pagesDeep Learning Mysteries - Aravind AriharasudhanAravind AriharasudhanNo ratings yet
- STAT501 Complex SurveyDocument104 pagesSTAT501 Complex SurveyPercy Soto BecerraNo ratings yet
- The Histone Code HypothesisDocument5 pagesThe Histone Code HypothesisBrian D. StrahlNo ratings yet
- A Tutorial On Principal Component AnalysisDocument29 pagesA Tutorial On Principal Component AnalysisrigastiNo ratings yet
- Planet Orbits in PythonDocument7 pagesPlanet Orbits in PythonAlankarDuttaNo ratings yet
- Artificial Intelligence Driven Drug Repurpos - 2021 - Current Research in PharmaDocument10 pagesArtificial Intelligence Driven Drug Repurpos - 2021 - Current Research in PharmaZac IngNo ratings yet
- Data Extraction & Exploration With SPARQL & The Talis PlatformDocument49 pagesData Extraction & Exploration With SPARQL & The Talis PlatformSurabhi SinghNo ratings yet
- ECC - Cyclic Group Cryptography With EllipticDocument21 pagesECC - Cyclic Group Cryptography With EllipticMkumNo ratings yet
- Tutorial For StataDocument57 pagesTutorial For StatasuchitjackNo ratings yet
- Deep Learning Tutorial Release 0.1Document173 pagesDeep Learning Tutorial Release 0.1lerhlerhNo ratings yet
- Quantum Neural Networks Versus Conventional Feedforward Neural NDocument10 pagesQuantum Neural Networks Versus Conventional Feedforward Neural NNavneet KumarNo ratings yet
- Grbook PDFDocument997 pagesGrbook PDFAleksandërNo ratings yet
- Predicting Clinical Outcomes From Genomics Deep Learning ModelsDocument11 pagesPredicting Clinical Outcomes From Genomics Deep Learning ModelsVenkat KunaNo ratings yet
- Copula StatisticsDocument8 pagesCopula StatisticsUmadineNo ratings yet
- VHDL Made EasyDocument424 pagesVHDL Made EasyAjayChandrakarNo ratings yet
- Unsupervised LearningDocument3 pagesUnsupervised LearningAjayChandrakarNo ratings yet
- Clade: Clade: Clade: Clade:: Rosa RubiginosaDocument9 pagesClade: Clade: Clade: Clade:: Rosa RubiginosaAjayChandrakarNo ratings yet
- Durg DistrictDocument2 pagesDurg DistrictAjayChandrakarNo ratings yet
- Ee) Is A Knowledge Base Website On Which Users: (Listen)Document13 pagesEe) Is A Knowledge Base Website On Which Users: (Listen)AjayChandrakarNo ratings yet
- Pattern RecognitionDocument9 pagesPattern RecognitionAjayChandrakarNo ratings yet
- Human Rights Act 1998Document10 pagesHuman Rights Act 1998AjayChandrakarNo ratings yet
- Single CellingDocument1 pageSingle CellingAjayChandrakarNo ratings yet
- Minimum Spanning TreeDocument11 pagesMinimum Spanning TreeAjayChandrakarNo ratings yet
- Prison CellDocument2 pagesPrison CellAjayChandrakarNo ratings yet
- DNA (Japanese: D: 1 Plot 2 Release 3 Anime Adaptation 4 References 5 External LinksDocument7 pagesDNA (Japanese: D: 1 Plot 2 Release 3 Anime Adaptation 4 References 5 External LinksAjayChandrakarNo ratings yet
- Case Western Reserve University PDFDocument20 pagesCase Western Reserve University PDFAjayChandrakarNo ratings yet
- RNA InterferenceDocument26 pagesRNA InterferenceAjayChandrakarNo ratings yet
- From Wikipedia, The Free EncyclopediaDocument6 pagesFrom Wikipedia, The Free EncyclopediaAjayChandrakarNo ratings yet
- Donald KnuthDocument11 pagesDonald KnuthAjayChandrakarNo ratings yet
- Mentor GraphicsDocument4 pagesMentor GraphicsAjayChandrakarNo ratings yet
- Japanese Martial ArtsDocument13 pagesJapanese Martial ArtsAjayChandrakarNo ratings yet
- D82167GC10-Practices For Lesson 8Document36 pagesD82167GC10-Practices For Lesson 8ChristianQuirozPlefkeNo ratings yet
- Powernel1500 TDS EN 02152006Document1 pagePowernel1500 TDS EN 02152006Magoge NgoashengNo ratings yet
- Water Cooled Chiller (SHUBAILY GRAND MALL)Document40 pagesWater Cooled Chiller (SHUBAILY GRAND MALL)kdpmansiNo ratings yet
- 17-File Utama Naskah-96-1-10-20210301Document8 pages17-File Utama Naskah-96-1-10-20210301Angga DwNo ratings yet
- HART Communication With GF868, XGM868, XGS868, and XMT868 FlowmetersDocument7 pagesHART Communication With GF868, XGM868, XGS868, and XMT868 FlowmetersEnrique AntonioNo ratings yet
- 24/10/2017. ",, IssnDocument2 pages24/10/2017. ",, IssnMikhailNo ratings yet
- Name: Edwin D. Bagos Jr. Date: Course, Year §ion: BSIT 1-E Rating: Contact Number: 09755276308 Subject: Computer Programming 1-JAVADocument5 pagesName: Edwin D. Bagos Jr. Date: Course, Year §ion: BSIT 1-E Rating: Contact Number: 09755276308 Subject: Computer Programming 1-JAVAMonalyn Señaris100% (2)
- Worksheet Binomial Distribution ProblemsDocument7 pagesWorksheet Binomial Distribution Problemsonek1ed50% (2)
- Computer Shortcut Keys SystemDocument5 pagesComputer Shortcut Keys SystemNo RebelNo ratings yet
- Kyehyun Park - Drawing and Painting Beautiful Flowers - Discover Techniques For Creating Realistic Florals and Plants in Pencil and Watercolor-Quarry Books (2022)Document334 pagesKyehyun Park - Drawing and Painting Beautiful Flowers - Discover Techniques For Creating Realistic Florals and Plants in Pencil and Watercolor-Quarry Books (2022)Krutika Sapkal94% (18)
- Tutorial 4Document3 pagesTutorial 4chinnu rokzNo ratings yet
- Steel Design (Moment and Shear Check) (For Simply Supported)Document8 pagesSteel Design (Moment and Shear Check) (For Simply Supported)aikalessNo ratings yet
- IET DAVV 2014 Com2Document12 pagesIET DAVV 2014 Com2jainam dudeNo ratings yet
- Strion Led HL - SupDocument2 pagesStrion Led HL - SupPatrickNo ratings yet
- Physics Midterm Review PacketDocument6 pagesPhysics Midterm Review PacketJasper SendraNo ratings yet
- Manual Xtable EXCEL LinkDocument7 pagesManual Xtable EXCEL LinkElena Alexandra BeladanNo ratings yet
- Adr141c PDFDocument11 pagesAdr141c PDFNamrata Shetti100% (1)
- Ritual To Use The Seals of SolomonDocument4 pagesRitual To Use The Seals of Solomonrarmandjr8474100% (11)
- Thesis - AN Fertiliser Properties Applic and Safety FinlandDocument256 pagesThesis - AN Fertiliser Properties Applic and Safety FinlandGonzalo O'ortiz Araneda's IIINo ratings yet
- PygmyManual v2 - 31Document67 pagesPygmyManual v2 - 31myplaxisNo ratings yet
- Datasheet Solis 110K 5GDocument2 pagesDatasheet Solis 110K 5GAneeq TahirNo ratings yet
- Dexxum TDocument15 pagesDexxum Tfrancisco mugica quintanaNo ratings yet
- ISO 3384 2005-Stress RelaxationDocument18 pagesISO 3384 2005-Stress RelaxationshashaNo ratings yet
- Math5 Q4 Mod11 OrganizingDataInTabularFormAndPresentingThemInALineGraph V1Document45 pagesMath5 Q4 Mod11 OrganizingDataInTabularFormAndPresentingThemInALineGraph V1ronaldNo ratings yet
- Precision 10 40 Operating InstructionsDocument27 pagesPrecision 10 40 Operating InstructionsDaniel PeluffoNo ratings yet
- Convergence and Divergence of SequencesDocument12 pagesConvergence and Divergence of SequencesUnexpected TheoryNo ratings yet
- Jadual Seminar 1 0910Document24 pagesJadual Seminar 1 0910ScalperNo ratings yet
- U2 Lec4 SizeAdjustmentDocument69 pagesU2 Lec4 SizeAdjustmentVy NguyenNo ratings yet
- 6.report Face RecognitionDocument45 pages6.report Face RecognitionSuresh MgNo ratings yet
- Parametric Modeling A Simple ToolDocument6 pagesParametric Modeling A Simple ToolFatimeh ShahinNo ratings yet