You might also like
- Air Flow Optimization of Venturi Type Intake RestrictorDocument7 pagesAir Flow Optimization of Venturi Type Intake RestrictorAlfredo GomezNo ratings yet
- UNIT 1 Lesson 2 Case Study IridiumDocument2 pagesUNIT 1 Lesson 2 Case Study IridiumNrk100% (1)
- Coiled TubingDocument20 pagesCoiled Tubingapi-3707212100% (3)
- PM4DEV The Project ConstraintsDocument6 pagesPM4DEV The Project ConstraintsAnky Sambyal100% (1)
- Topic 06 Activity On Node ApproachDocument29 pagesTopic 06 Activity On Node ApproachDanialNo ratings yet
- Project CharterDocument2 pagesProject CharterAhsan ShahidNo ratings yet
- Risk management exam prep: 17 inputs for risk analysisDocument4 pagesRisk management exam prep: 17 inputs for risk analysisVishnuu Kumar SinghNo ratings yet
- Project Management WPDocument13 pagesProject Management WPnirceuNo ratings yet
- LO3 - Operations and Project Management LO3Document49 pagesLO3 - Operations and Project Management LO3Diana Elena ChiribasaNo ratings yet
- Design of Slow Sand Filter FinalDocument11 pagesDesign of Slow Sand Filter FinalHemant SonawadekarNo ratings yet
- Septic Tank Design ComputationDocument1 pageSeptic Tank Design ComputationEngilbert AragonNo ratings yet
- Design Checklist PLDocument3 pagesDesign Checklist PLSiva KumarNo ratings yet
- TOP PROJECT MANAGEMENT TOOLSDocument6 pagesTOP PROJECT MANAGEMENT TOOLSrajkamalturns19No ratings yet
- Introduction to underbalanced drilling techniquesDocument21 pagesIntroduction to underbalanced drilling techniquesMohamed Abd El-Moniem67% (6)
- Chapter 7 Permeability Hydraulic ConductivityDocument73 pagesChapter 7 Permeability Hydraulic Conductivityjoemer cabayaoNo ratings yet
- Fundamentals of Project Management.Document11 pagesFundamentals of Project Management.javeria zahidNo ratings yet
- MCOM Project Implementation ProcessDocument16 pagesMCOM Project Implementation ProcessPreeti100% (1)
- P6 Databases Level 1Document14 pagesP6 Databases Level 1Nemesio Mandac IINo ratings yet
- PODS Conceptual Model-FINAL-v1-1 PDFDocument1 pagePODS Conceptual Model-FINAL-v1-1 PDFHector GarciaNo ratings yet
- Project Request and Approval Process.v1.6 Final 02202015Document22 pagesProject Request and Approval Process.v1.6 Final 02202015Saud ChaudharyNo ratings yet
- Evolution of ConceptDocument23 pagesEvolution of ConceptAndra NeculaNo ratings yet
- T MBBR and MBR PDFDocument117 pagesT MBBR and MBR PDFSwaminathan ThayumanavanNo ratings yet
- Course-01 Project ManagementDocument54 pagesCourse-01 Project Managementrufus. sNo ratings yet
- 1st Assignment of P.MDocument41 pages1st Assignment of P.Masim_mbaNo ratings yet
- Working With Project Steering CommitteesDocument3 pagesWorking With Project Steering Committeesfakhro100% (3)
- Scope Management Plan: Group 16 Western Sydney AirportDocument11 pagesScope Management Plan: Group 16 Western Sydney AirportZoe TanNo ratings yet
- Guide To Developing The Programme Business CaseDocument108 pagesGuide To Developing The Programme Business CaseMoukoko Loic100% (1)
- 1.1 General: Chabahil Road in Kathmandu District, BagmatiDocument25 pages1.1 General: Chabahil Road in Kathmandu District, Bagmatienlacer009No ratings yet
- Project Management Paper On RisksDocument30 pagesProject Management Paper On RisksBradley SusserNo ratings yet
- Question Two (MS Project - 30 Marks) : Task No Task Duration Predecessor Resources 1 Project ScopeDocument2 pagesQuestion Two (MS Project - 30 Marks) : Task No Task Duration Predecessor Resources 1 Project ScopeReagan SsebbaaleNo ratings yet
- 2014-Project Services CoordinatorDocument2 pages2014-Project Services CoordinatorSalman HussainNo ratings yet
- Lower Completion - Juan Tovar PDFDocument77 pagesLower Completion - Juan Tovar PDFMahmoud Ahmed Ali AbdelrazikNo ratings yet
- Case StudyDocument5 pagesCase StudySamuel NderituNo ratings yet
- Project Management and PanningDocument28 pagesProject Management and PanningronalsNo ratings yet
- 3 - Project Scheduling & ControllingDocument17 pages3 - Project Scheduling & ControllingOLA BAJABANo ratings yet
- Spreadsheet - Gas Blanketed Tanks - Inbreathing Process Calculations & Control Valve Sizing - Rev2Document26 pagesSpreadsheet - Gas Blanketed Tanks - Inbreathing Process Calculations & Control Valve Sizing - Rev2venkatesh801No ratings yet
- 02 - Project Management and IT Context (Online Class)Document40 pages02 - Project Management and IT Context (Online Class)Geofisika UINo ratings yet
- FreshEr+ water reusage system pitchDocument2 pagesFreshEr+ water reusage system pitchamanda natasiaNo ratings yet
- A Conceptual Framework For Tackling Knowable Unknown Unknowns in Project Management 2014 Journal of Operations ManagementDocument15 pagesA Conceptual Framework For Tackling Knowable Unknown Unknowns in Project Management 2014 Journal of Operations ManagementUmang SoniNo ratings yet
- Project Charter: Academic Toolbox Renewal ProjectDocument19 pagesProject Charter: Academic Toolbox Renewal ProjectharshaNo ratings yet
- Diving Decompression Chambers - Not Fit For Purpose - Risk of Injury To Personnel and Multiple FatalitiesDocument3 pagesDiving Decompression Chambers - Not Fit For Purpose - Risk of Injury To Personnel and Multiple FatalitiesDivers AssociationNo ratings yet
- Case Study-Project CharterDocument1 pageCase Study-Project CharterAref WanuNo ratings yet
- Draft LP Local Plan September 2016Document301 pagesDraft LP Local Plan September 2016Papa1No ratings yet
- 01 - 03 - Comparison of Portfolios Programs ProjectsDocument1 page01 - 03 - Comparison of Portfolios Programs ProjectsSatish Raghupathi100% (1)
- Leadership in Megaprojects and Production Management Lessons From The T5 Project CID Report No1Document19 pagesLeadership in Megaprojects and Production Management Lessons From The T5 Project CID Report No1LTE002No ratings yet
- Industrial Park Development - An Overview and Case Study of MylesDocument128 pagesIndustrial Park Development - An Overview and Case Study of MylesSalman KharalNo ratings yet
- Itaipu Project CharterDocument7 pagesItaipu Project Chartersubaashk100% (1)
- Issues during Project scoping and planningDocument7 pagesIssues during Project scoping and planningmichael100% (1)
- Individual Assignment1 231019Document3 pagesIndividual Assignment1 231019nevermoreNo ratings yet
- PPM 641A2Sample1Document12 pagesPPM 641A2Sample1Alison BennettNo ratings yet
- Morris & Jamieson (2004) Translating Corporate Strategy Into Project StrategyDocument119 pagesMorris & Jamieson (2004) Translating Corporate Strategy Into Project StrategyricardoronchettiNo ratings yet
- SPM AND ITS NEED: HOW PROJECT MANAGEMENT DELIVERS RESULTSDocument3 pagesSPM AND ITS NEED: HOW PROJECT MANAGEMENT DELIVERS RESULTSranydi0% (2)
- Agile Project Management - Agilism Versus Traditional ApproachesDocument9 pagesAgile Project Management - Agilism Versus Traditional ApproachesTayba AwanNo ratings yet
- Literature StudyDocument12 pagesLiterature StudyDileep GNo ratings yet
- Linking Procurement Systems To Project Priorities: Mohan M. Kumaraswamy and Sunil M. DissanayakaDocument16 pagesLinking Procurement Systems To Project Priorities: Mohan M. Kumaraswamy and Sunil M. DissanayakaJoonAstrianaNiluhNo ratings yet
- Project Management Final ProjectDocument39 pagesProject Management Final Projectapi-546503298No ratings yet
- Project Manager in TelecommunicationsDocument2 pagesProject Manager in Telecommunicationsapi-79112020No ratings yet
- Project Charter Specific Instructions Required Number of PagesDocument3 pagesProject Charter Specific Instructions Required Number of PagesJessaryn VicenteNo ratings yet
- Panama Canal PresentationDocument14 pagesPanama Canal Presentationwordsinpages0% (1)
- 4D Scheduling – A Case Study Visualizes Construction Phases and TimelinesDocument6 pages4D Scheduling – A Case Study Visualizes Construction Phases and TimelinesPeterHesselbjergNo ratings yet
- Management in Complex EnvironmentsDocument266 pagesManagement in Complex EnvironmentsRockasemNo ratings yet
- Managing Scope Creep in Project ManagementDocument4 pagesManaging Scope Creep in Project ManagementMahmoud Abd ElhamiedNo ratings yet
- Whitepaper Future of Project ManagementDocument4 pagesWhitepaper Future of Project Managementluis lopezNo ratings yet
- Town PlanningDocument9 pagesTown PlanningKalyani PatilNo ratings yet
- Digital Integrated Platform Bringing Resilience To Construction EnterpriseDocument9 pagesDigital Integrated Platform Bringing Resilience To Construction EnterpriseJasmine TsoNo ratings yet
- Reflective Report 134Document2 pagesReflective Report 134Radu IonutNo ratings yet
- Soft skills that boost project successDocument17 pagesSoft skills that boost project successGary PitNo ratings yet
- PM Domains PDFDocument44 pagesPM Domains PDFkenshsNo ratings yet
- Migrating 200 PCs Mac to Windows 11Document4 pagesMigrating 200 PCs Mac to Windows 11Bibek SubediNo ratings yet
- Chapter 13 - Project Stakeholder ManagementDocument2 pagesChapter 13 - Project Stakeholder ManagementscribdNo ratings yet
- Talla Cours Si BD 08 09Document37 pagesTalla Cours Si BD 08 09diana nistoranNo ratings yet
- Efeitos Fisicos e Mentais Do TeletrabalhoDocument13 pagesEfeitos Fisicos e Mentais Do TeletrabalhoFrancisco Henrique Rosa MaiaNo ratings yet
- Li_2022_J._Phys.__Conf._Ser._2369_012008Document6 pagesLi_2022_J._Phys.__Conf._Ser._2369_012008diana nistoranNo ratings yet
- Enterprise Modelling: Research Review and Outlook: To Cite This VersionDocument45 pagesEnterprise Modelling: Research Review and Outlook: To Cite This Versiondiana nistoranNo ratings yet
- Stress and Burnout COVID Study Pre-Print 7-6-20Document28 pagesStress and Burnout COVID Study Pre-Print 7-6-20Mahvish F.100% (1)
- Mccormack 2002Document19 pagesMccormack 2002diana nistoranNo ratings yet
- 2012 - James Meyer 2012 CH How Organizational Leader Power Influence Organizational CultureDocument29 pages2012 - James Meyer 2012 CH How Organizational Leader Power Influence Organizational Culturediana nistoranNo ratings yet
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDocument37 pagesDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - Lincolndiana nistoranNo ratings yet
- A Comparison and Analysis of Army Generals and Executives: Adams, Andrew EDocument587 pagesA Comparison and Analysis of Army Generals and Executives: Adams, Andrew Ediana nistoranNo ratings yet
- Strategic Leadership - Shaping Organizational Climate and CultureDocument5 pagesStrategic Leadership - Shaping Organizational Climate and Culturediana nistoranNo ratings yet
- Military Leadership - A Context Specific Review PDFDocument37 pagesMilitary Leadership - A Context Specific Review PDFRashed KamalNo ratings yet
- Managing Work-Related Psychosocial Risks During The COVID-19Document36 pagesManaging Work-Related Psychosocial Risks During The COVID-19villarroyaNo ratings yet
- Comparing Two Instruments of Transformational Leadership: Antek Kasemaa, Reelika SuvisteDocument30 pagesComparing Two Instruments of Transformational Leadership: Antek Kasemaa, Reelika Suvistediana nistoranNo ratings yet
- Matthews 2006Document13 pagesMatthews 2006diana nistoranNo ratings yet
- Future Military Leadership CharacteristicsDocument13 pagesFuture Military Leadership Characteristicsdiana nistoranNo ratings yet
- Knowledge, Skills, and Abilities For Military Leader InfluenceDocument155 pagesKnowledge, Skills, and Abilities For Military Leader InfluenceSa WajiNo ratings yet
- The Psychological Impact of Teleworking: Stress, Emotions and HealthDocument18 pagesThe Psychological Impact of Teleworking: Stress, Emotions and HealthKevin KCHNo ratings yet
- When You Work From Home: Mental Health and WellbeingDocument4 pagesWhen You Work From Home: Mental Health and Wellbeingdiana nistoranNo ratings yet
- Stress: Exam Paper AdviceDocument22 pagesStress: Exam Paper Advicediana nistoranNo ratings yet
- Depression Theory, AssessmentDocument11 pagesDepression Theory, Assessmentdiana nistoranNo ratings yet
- Workplace Isolation Occurring in Remote WorkersDocument141 pagesWorkplace Isolation Occurring in Remote Workersdiana nistoranNo ratings yet
- Sustainability 12 09804 v3Document14 pagesSustainability 12 09804 v3diana nistoranNo ratings yet
- Stress Generation in DepressionDocument12 pagesStress Generation in Depressiondiana nistoranNo ratings yet
- From Stress To DepressionDocument7 pagesFrom Stress To Depressiondiana nistoranNo ratings yet
- Business Plan For The Creation and Launch of A Fashion Brand For WomenDocument90 pagesBusiness Plan For The Creation and Launch of A Fashion Brand For Womendiana nistoranNo ratings yet
- Empathy Historical ExplorationDocument20 pagesEmpathy Historical Explorationdiana nistoranNo ratings yet
- Africentrism and Gender Role Identification - Exploring The RelationDocument146 pagesAfricentrism and Gender Role Identification - Exploring The Relationdiana nistoranNo ratings yet
- Body Image and Participant Characteristics in Emerging AdultsDocument203 pagesBody Image and Participant Characteristics in Emerging Adultsdiana nistoranNo ratings yet
- Body Image and Participant Characteristics in Emerging AdultsDocument203 pagesBody Image and Participant Characteristics in Emerging Adultsdiana nistoranNo ratings yet
- EU Textile StrategyDocument2 pagesEU Textile Strategydiana nistoranNo ratings yet
- Diagrama HidraulicoDocument4 pagesDiagrama HidraulicoFabrizio GiaimoNo ratings yet
- Dr. Nurul Nadia Adnan Abridged By: DR. AHMAD HASSANDocument27 pagesDr. Nurul Nadia Adnan Abridged By: DR. AHMAD HASSANThalagawali RajagopalNo ratings yet
- An Experiment To Demonstrate How A Catalyst Affects The Rate of A ReactionDocument2 pagesAn Experiment To Demonstrate How A Catalyst Affects The Rate of A ReactionLyre RustyNo ratings yet
- Revised boiler design and supply offerDocument1 pageRevised boiler design and supply offervipul gandhiNo ratings yet
- Nibe Fighter 1240 ManualDocument64 pagesNibe Fighter 1240 ManualTokyoMBNo ratings yet
- HMTDocument37 pagesHMTVaibhav Vithoba NaikNo ratings yet
- Water Hammer Tutorials Attempt The Tutorials and Check Your Answers Against The Solutions GivenDocument3 pagesWater Hammer Tutorials Attempt The Tutorials and Check Your Answers Against The Solutions GivenNickson KomsNo ratings yet
- MISSION Magnum Ultimate XP Centrifugal Pump SpecificationDocument2 pagesMISSION Magnum Ultimate XP Centrifugal Pump SpecificationelverNo ratings yet
- Effect of Head Drive and Air Chamber Volume To Hydraulic Ram Pump PerformanceDocument8 pagesEffect of Head Drive and Air Chamber Volume To Hydraulic Ram Pump PerformanceBang RegarNo ratings yet
- Models - Mph.vacuum DryingDocument16 pagesModels - Mph.vacuum DryingRF ZDavNo ratings yet
- Diffusion Osmosis WSDocument4 pagesDiffusion Osmosis WSCamila ValerioNo ratings yet
- Lect 8 - 12 - Equations of Change - IsothermalDocument29 pagesLect 8 - 12 - Equations of Change - IsothermalSatyajit SamalNo ratings yet
- Aspirated Vs Non AspiratedDocument1 pageAspirated Vs Non AspiratedRoger AklNo ratings yet
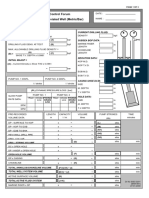
- International Well Control Forum Subsea BOP Kill Sheet - Deviated Well (Metric/Bar)Document3 pagesInternational Well Control Forum Subsea BOP Kill Sheet - Deviated Well (Metric/Bar)Tg TarroNo ratings yet
- Factors Affecting Thermal Insulation Properties of GarmentDocument7 pagesFactors Affecting Thermal Insulation Properties of GarmentravikantNo ratings yet
- Theoretical concepts of plasticity theoryDocument17 pagesTheoretical concepts of plasticity theoryOptimMart InternationaleNo ratings yet
- Convection HMTDocument47 pagesConvection HMTbalakaleesNo ratings yet
- Camfil HepaDocument7 pagesCamfil HepaAbhishek JadhavNo ratings yet
- Micro Project: Title of The ProjectDocument17 pagesMicro Project: Title of The ProjectAbhi BirajdarNo ratings yet