You might also like
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- A Study of Synchronous Motor Drive Using SFCDocument4 pagesA Study of Synchronous Motor Drive Using SFCBrian GuevaraNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Decoupling Network of Field-Oriented Control in Variable-Frequency DrivesDocument5 pagesDecoupling Network of Field-Oriented Control in Variable-Frequency DrivesJoseph NoumbissieNo ratings yet
- Modeling, Simulation and Implementation of Brushed DC Motor Speed Control Using Optical Incremental Encoder FeedbackDocument10 pagesModeling, Simulation and Implementation of Brushed DC Motor Speed Control Using Optical Incremental Encoder Feedbackindahrahmawati8No ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- A Feedback Linearizing Control Scheme For ADocument8 pagesA Feedback Linearizing Control Scheme For AFatih BurakNo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- Industrial Electronics CbcgsDocument28 pagesIndustrial Electronics Cbcgshadesg895No ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- A New Topology For Unipolar Brushless DC Motor DriveDocument55 pagesA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06No ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Simulation DC Motor Speed Control System by Using PID ControllerDocument6 pagesSimulation DC Motor Speed Control System by Using PID ControllerEditor IJTSRDNo ratings yet
- Vsi Fed 3ph ImDocument13 pagesVsi Fed 3ph ImWisemin LinsNo ratings yet
- An Improved Approach of Control For A Battery Charger Based Forward Converter and SEPICDocument6 pagesAn Improved Approach of Control For A Battery Charger Based Forward Converter and SEPICPablo PulacheNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument5 pagesControl BLDC Motor Speed Using PID ControllerAbhay JangirNo ratings yet
- 1.1 Voltage Source Converters (VSC) : TH THDocument12 pages1.1 Voltage Source Converters (VSC) : TH THSherif M. DabourNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Dumitrache 2017Document6 pagesDumitrache 20171 Mech Tejas JapeNo ratings yet
- June 03 El 5Document6 pagesJune 03 El 5Mithun KumarNo ratings yet
- CanonicalDocument7 pagesCanonicalTechnos_IncNo ratings yet
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocument6 pagesReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Mahdipour 2015Document14 pagesMahdipour 2015Yustinus PadmundanaNo ratings yet
- MPC Rizado TorqueDocument6 pagesMPC Rizado TorquesebastianG1995No ratings yet
- Performance Analysis of Fuzzy Logic Cont PDFDocument6 pagesPerformance Analysis of Fuzzy Logic Cont PDFMuruganandam MasilamaniNo ratings yet
- A Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesDocument8 pagesA Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesishtiyqueNo ratings yet
- Control VectorialDocument6 pagesControl VectorialdanipedoNo ratings yet
- ProjectDocument30 pagesProjectmitesh goyal100% (1)
- IJETR2166Document8 pagesIJETR2166anil kasotNo ratings yet
- Four Switch Three Phase Inverter Control of BLDC MotorDocument6 pagesFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNo ratings yet
- Simulation of Novel Technique For DC Drive For Crane ApplicationDocument5 pagesSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareDocument7 pagesMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumNo ratings yet
- CIRED2011 0535 FinalDocument4 pagesCIRED2011 0535 FinalUsman RasheedNo ratings yet
- Assignment Elecrical DriveDocument7 pagesAssignment Elecrical DriveTaufik AdhaNo ratings yet
- 2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMDocument6 pages2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMKiki RamadhanNo ratings yet
- BLDC1Document5 pagesBLDC1elabam39No ratings yet
- Sensorless Field Oriented Control Using An 8-Bit MicrocontrollerDocument3 pagesSensorless Field Oriented Control Using An 8-Bit MicrocontrollerasASasASNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- A Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeDocument10 pagesA Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeTJPRC PublicationsNo ratings yet
- Thyristor Based Speed Control Techniques of DC Motor: A Comparative AnalysisDocument7 pagesThyristor Based Speed Control Techniques of DC Motor: A Comparative Analysismahendra ANo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Active Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der SuDocument6 pagesActive Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der Su01689373477No ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- Automatic Alternator SynchronisationDocument24 pagesAutomatic Alternator SynchronisationHemant Patel50% (2)
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseDocument6 pagesDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81No ratings yet
- NA011 Manual 10 2009Document72 pagesNA011 Manual 10 2009Brian GuevaraNo ratings yet
- 06 Short Circuit TheoryDocument28 pages06 Short Circuit TheoryJuan CollantesNo ratings yet
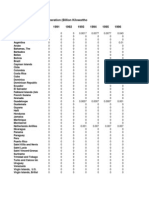
- Table: Wind Electricity Net Generation (Billion Kilowatthours)Document3 pagesTable: Wind Electricity Net Generation (Billion Kilowatthours)Brian GuevaraNo ratings yet
- Basic Design Report - Part 2 Rev 1 Oct 2007 PDFDocument49 pagesBasic Design Report - Part 2 Rev 1 Oct 2007 PDFBrian GuevaraNo ratings yet
- EQ Setting For Sennheiser HD58X Jubilee: SPL Frequency Response With EQ SPL Frequency Response Without EQDocument1 pageEQ Setting For Sennheiser HD58X Jubilee: SPL Frequency Response With EQ SPL Frequency Response Without EQpesut gantengNo ratings yet
- Bose Headset ManualDocument36 pagesBose Headset ManualKevinKadlec100% (1)
- 2023 Radio Ip MozambiqueDocument53 pages2023 Radio Ip MozambiqueCarlosNo ratings yet
- Nokia Ul 64qamDocument7 pagesNokia Ul 64qamAsher TanvirNo ratings yet
- Assignment No. 1Document1 pageAssignment No. 1Sharjeel AhmadNo ratings yet
- 5nm FinFETDocument36 pages5nm FinFETGary Ryan Donovan100% (1)
- Ex29007-Pdf BDDocument155 pagesEx29007-Pdf BDsereptNo ratings yet
- Control DrawingDocument7 pagesControl DrawingYasir SajjadNo ratings yet
- Assignment 3 Tania, 102183029Document18 pagesAssignment 3 Tania, 102183029Tania CENo ratings yet
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocument40 pagesWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanNo ratings yet
- Activities 1 To 6Document13 pagesActivities 1 To 6SubhaNo ratings yet
- 74HCT14 Hex Schmitt Trigger Inverter With LSTTL Compatible InputsDocument8 pages74HCT14 Hex Schmitt Trigger Inverter With LSTTL Compatible InputsEloyNo ratings yet
- Cen-Tech Multimeter Manual PDFDocument12 pagesCen-Tech Multimeter Manual PDFmike davisNo ratings yet
- Ac Spindle DL-SCZDocument96 pagesAc Spindle DL-SCZBa DuyNo ratings yet
- EE-103: Electrical Engineering: Chap:6 (Part I) CapacitorsDocument27 pagesEE-103: Electrical Engineering: Chap:6 (Part I) CapacitorsZarak KhanNo ratings yet
- Document 1 WatanabeDocument58 pagesDocument 1 WatanabeHendrik BastiwNo ratings yet
- MIC101 - Koushik DuttaDocument16 pagesMIC101 - Koushik DuttaKoushik DuttaNo ratings yet
- Caudalimetro Coriolis Kobold HPCDocument6 pagesCaudalimetro Coriolis Kobold HPCBase SistemasNo ratings yet
- Technical Specification Cranefrigor DV Qvo 493Document3 pagesTechnical Specification Cranefrigor DV Qvo 493Jefferson dos Santos XavierNo ratings yet
- Silicon Chip 2008.03Document108 pagesSilicon Chip 2008.03David Elias Flores Escalante100% (4)
- Bipolar Junction TransistorsDocument38 pagesBipolar Junction TransistorsMuhammad AbdullahNo ratings yet
- 2SC3421Document4 pages2SC3421Berenice MárquezNo ratings yet
- Energies: Harmonic Mitigation Using Passive Harmonic Filters: Case Study in A Steel Mill Power SystemDocument16 pagesEnergies: Harmonic Mitigation Using Passive Harmonic Filters: Case Study in A Steel Mill Power SystemNelson ParijósNo ratings yet
- Tadano Aml m1 m2 TR Mkii Connection InstructionsDocument5 pagesTadano Aml m1 m2 TR Mkii Connection Instructionsej ejaz0% (1)
- 1 Introduction To Analog IC DesignDocument41 pages1 Introduction To Analog IC Designnavinkumarrr588No ratings yet
- M 1 (Compresor)Document2 pagesM 1 (Compresor)コロン ベンジャミンNo ratings yet
- NA - Module 4 Question BankDocument3 pagesNA - Module 4 Question Bankdarshan nagarajuNo ratings yet
- CVV65DSX-M (Dualband CommScope)Document6 pagesCVV65DSX-M (Dualband CommScope)Benjamin GilNo ratings yet
- Fuse Bus-Ele-Cat-1007-Flc-2018-Sec-03-ElxDocument16 pagesFuse Bus-Ele-Cat-1007-Flc-2018-Sec-03-ElxM. Arif NurdinNo ratings yet
- 2SB1342 PDFDocument3 pages2SB1342 PDFMarcos Guilherme CunhaNo ratings yet