You might also like
- Transparencias Bloque EngranajesDocument15 pagesTransparencias Bloque EngranajesmarkotronicNo ratings yet
- Display PDFDocument1 pageDisplay PDFLeinad RialdaNo ratings yet
- Evolucion de Las Estructuras PDFDocument9 pagesEvolucion de Las Estructuras PDFJaime San Martín AmadorNo ratings yet
- Manual MotocultorDocument29 pagesManual MotocultorLeinad Rialda50% (2)
- ReporteDocument2 pagesReporteLeinad RialdaNo ratings yet
- Presentación P.L.C.Document16 pagesPresentación P.L.C.Bryam JHNo ratings yet
- Catalogo de Rodamientos NSKDocument551 pagesCatalogo de Rodamientos NSKFabricio Roldan Erazo100% (10)
- Reporte Maxi y Mini PDFDocument1 pageReporte Maxi y Mini PDFLeinad RialdaNo ratings yet
- Programa Dos PistonesDocument3 pagesPrograma Dos PistonesLeinad RialdaNo ratings yet
- Line FollDocument1 pageLine FollLeinad RialdaNo ratings yet
- Escribe El Siguiente Código en Un Fichero Llamado Regcor.cDocument1 pageEscribe El Siguiente Código en Un Fichero Llamado Regcor.cLeinad RialdaNo ratings yet
- Mapa de 5Document2 pagesMapa de 5Leinad RialdaNo ratings yet
- Selección y Montaje de RodamientosDocument21 pagesSelección y Montaje de RodamientosLeinad RialdaNo ratings yet
- Dos PistonesDocument3 pagesDos PistonesLeinad RialdaNo ratings yet
- Rodamientos-Daniel Ariza PDFDocument11 pagesRodamientos-Daniel Ariza PDFLeinad RialdaNo ratings yet
- Selección y Montaje de RodamientosDocument21 pagesSelección y Montaje de RodamientosLeinad RialdaNo ratings yet
- Instrumentos Medicion Vibraciones-Daniel ArizaDocument23 pagesInstrumentos Medicion Vibraciones-Daniel ArizaLeinad RialdaNo ratings yet
- Actividad Final VibracionesDocument8 pagesActividad Final VibracionesLeinad RialdaNo ratings yet
- Desarrollo de Un Plan de MantenimientoDocument10 pagesDesarrollo de Un Plan de MantenimientoLeinad RialdaNo ratings yet
- MovilidadDocument3 pagesMovilidadLeinad Rialda100% (2)
- Contact OresDocument3 pagesContact OresLeinad RialdaNo ratings yet
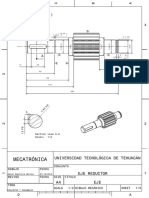
- Eje Reductor Sheet 1Document1 pageEje Reductor Sheet 1Leinad RialdaNo ratings yet
- Auto Estim ADocument4 pagesAuto Estim ALeinad RialdaNo ratings yet
- Ejercicios Sheet 1Document1 pageEjercicios Sheet 1Leinad RialdaNo ratings yet
- Diagramas de Cuerpo Libre y Movilidad-DanielDocument8 pagesDiagramas de Cuerpo Libre y Movilidad-DanielLeinad RialdaNo ratings yet
- Libro 1Document3 pagesLibro 1Leinad RialdaNo ratings yet
- Robót Ica: Estructura Cristalina de Los Materiales SemiconductoresDocument1 pageRobót Ica: Estructura Cristalina de Los Materiales SemiconductoresLeinad RialdaNo ratings yet
- WinccDocument2 pagesWinccLeinad RialdaNo ratings yet
- Que Es GHZDocument7 pagesQue Es GHZgustavo8812No ratings yet
- Polaridad de Transformadores - Lab. Maquinas ElectricasDocument19 pagesPolaridad de Transformadores - Lab. Maquinas ElectricasOswaldo Giraldo Campos100% (1)
- Memoria DescriptivaDocument12 pagesMemoria DescriptivaCarlos Junior Nole IzquierdoNo ratings yet
- Potencia ElectricaDocument12 pagesPotencia ElectricaEKANo ratings yet
- Memoria de Instalaciones ElectricasDocument21 pagesMemoria de Instalaciones ElectricasLincoln Esteban EstebanNo ratings yet
- Manual de Sonidos Pedalera Boss gt1bDocument29 pagesManual de Sonidos Pedalera Boss gt1bAmérica Benítez100% (2)
- Lógica Cableada PDFDocument32 pagesLógica Cableada PDFAlvaro Loken DomeNo ratings yet
- Lab 6 F.-C.E.IDocument9 pagesLab 6 F.-C.E.IJesus QVasquezNo ratings yet
- TV DigitalDocument55 pagesTV Digitalfabricioriveraos1983No ratings yet
- Informe Previo SimulacionesDocument27 pagesInforme Previo SimulacionesLUIS KEVIN ZORIA TACILLANo ratings yet
- Calculo ElectricoDocument7 pagesCalculo Electricoaquispefa100% (1)
- Fundiple Son Unos TruchosDocument1 pageFundiple Son Unos Truchoscharly36No ratings yet
- Diapositivas PONDocument23 pagesDiapositivas PONAlejo CrowNo ratings yet
- MGM-Boliviana de AviacionDocument130 pagesMGM-Boliviana de AviacionAlex Higuita100% (1)
- Movimiento Armonico SimpleDocument5 pagesMovimiento Armonico SimpleCesar Gaspar ChavezNo ratings yet
- Informe Corto-Vacio-CargaDocument6 pagesInforme Corto-Vacio-Cargadavid alejandro muñozNo ratings yet
- INSTRUCCIONES DE OPERACION Durastar 4300 PDFDocument9 pagesINSTRUCCIONES DE OPERACION Durastar 4300 PDFjuan100% (1)
- B-FDC-L060-IN-10.003.003 Instructivo Balanza Mettler ToledoDocument6 pagesB-FDC-L060-IN-10.003.003 Instructivo Balanza Mettler ToledoJose Luis RodriguezNo ratings yet
- Diseño de Circuitos ImpresosDocument13 pagesDiseño de Circuitos ImpresosjosejulianNo ratings yet
- Informe de Luces Variables TerminadoDocument7 pagesInforme de Luces Variables TerminadoGustavo QCondezo100% (1)
- Cuadro Comparativo Neumática y ElectroneumáticaDocument3 pagesCuadro Comparativo Neumática y ElectroneumáticaFatima NaborNo ratings yet
- Ruth Rueda Aporte Analisis ComplejoDocument3 pagesRuth Rueda Aporte Analisis ComplejoFerni_3rNo ratings yet
- TAllerDocument6 pagesTAllerJose Manuel Betancourt100% (4)
- 15046-21 Adquisicion Laboratorio SerologiaDocument7 pages15046-21 Adquisicion Laboratorio SerologiaCALIDAD DIAGNOVETNo ratings yet
- Agentes NucleantesDocument4 pagesAgentes NucleantesR Daniela TorrealbaNo ratings yet
- Qué Es Un Sistema Operativo PDFDocument14 pagesQué Es Un Sistema Operativo PDFpao_beiap97No ratings yet
- 9S 75 Mercedes - 1308050189 - EsDocument39 pages9S 75 Mercedes - 1308050189 - Escampollano14100% (3)
- Estanca Hermética - PhilipsDocument2 pagesEstanca Hermética - PhilipsBryan C. Olaechea SaavedraNo ratings yet
- Principios Físicos de Sensores PDFDocument40 pagesPrincipios Físicos de Sensores PDFrimce77100% (3)