You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Electrical Engineering Hand BookDocument22 pagesElectrical Engineering Hand Bookjicksonjohn100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual Do Automation Studio - ProfissionalDocument20 pagesManual Do Automation Studio - Profissionalmarcelocrqr100% (2)
- Answer: Q1Document46 pagesAnswer: Q1amar2k904100% (3)
- Clock Gating MethodologyDocument71 pagesClock Gating MethodologyGirish BabuNo ratings yet
- MR-96A Service Manual V3.0 enDocument57 pagesMR-96A Service Manual V3.0 enHussain Amir Ali0% (1)
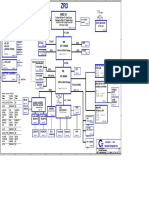
- Acer Aspire 3050, 5050 Quanta ZR3 DA0ZR3MB6E0 DA0ZR3MB6C1Document31 pagesAcer Aspire 3050, 5050 Quanta ZR3 DA0ZR3MB6E0 DA0ZR3MB6C1essemirNo ratings yet
- Microprocessors 1: The 8051 Instruction SetDocument28 pagesMicroprocessors 1: The 8051 Instruction SetnagasaikiranNo ratings yet
- DCK 255Document27 pagesDCK 255Opris ManuelNo ratings yet
- 15A04802 Low Power VLSI Circuits & SystemsDocument1 page15A04802 Low Power VLSI Circuits & SystemsContent for all CreatorNo ratings yet
- Ut163 Usb ControllerDocument32 pagesUt163 Usb Controllerelcomandante100% (8)
- Ateml AT90USB162 DatasheetDocument306 pagesAteml AT90USB162 DatasheetComputer GuruNo ratings yet
- Cadence Tutorial PDFDocument61 pagesCadence Tutorial PDFJinesh Kb100% (1)
- Flash Stock Rom No LG K5 - Ultimate GuideDocument9 pagesFlash Stock Rom No LG K5 - Ultimate GuideCristóvão RodriguesNo ratings yet
- BiosDocument27 pagesBiosDrift GeeNo ratings yet
- Use of Digital Technologies in EducationDocument5 pagesUse of Digital Technologies in EducationOpen Access JournalNo ratings yet
- Computer Hardwares and Its FunctionDocument5 pagesComputer Hardwares and Its FunctionAmirul ShamNo ratings yet
- Simulation Set 2Document4 pagesSimulation Set 2Harsh ThakurNo ratings yet
- Types of Computers Based On Principles of OperationDocument6 pagesTypes of Computers Based On Principles of OperationMayank Jain NeerNo ratings yet
- IHI0024C Amba Apb Protocol SpecDocument28 pagesIHI0024C Amba Apb Protocol SpecAnil KumarNo ratings yet
- What Is A Computer BHS enDocument2 pagesWhat Is A Computer BHS enCrimson SilverNo ratings yet
- CJ2 - Basic Prog - PPT (Compatibility Mode)Document85 pagesCJ2 - Basic Prog - PPT (Compatibility Mode)Choirull HidayatNo ratings yet
- Clock Generator 8284Document14 pagesClock Generator 8284Faiz Ahmed100% (1)
- What Is Video RAMDocument2 pagesWhat Is Video RAMrks12345No ratings yet
- Implementation of 1-Bit Full Adder Circuit Using Pass Transistor LogicDocument11 pagesImplementation of 1-Bit Full Adder Circuit Using Pass Transistor LogicIJRASETPublicationsNo ratings yet
- Input Output OrganizationDocument30 pagesInput Output OrganizationGiri Saranu100% (22)
- Experiment 1Document7 pagesExperiment 1ydsrajuNo ratings yet
- The CMOS Inverter ExplainedDocument4 pagesThe CMOS Inverter ExplainedVidhya DsNo ratings yet
- Laboratory Manual: Digital System DesignDocument37 pagesLaboratory Manual: Digital System DesignArshad RasheedNo ratings yet
- Datasheet 74HCT04 PDFDocument4 pagesDatasheet 74HCT04 PDFCarlos RamirezNo ratings yet
- YBM 1200 ManualDocument31 pagesYBM 1200 Manualmartinaleguzzo100% (1)