You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Research Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemDocument14 pagesResearch Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemArrow96No ratings yet
- Understanding the Ziegler–Nichols Tuning Method for PID Speed Control of a DC MotorDocument13 pagesUnderstanding the Ziegler–Nichols Tuning Method for PID Speed Control of a DC MotorSaran SelvanNo ratings yet
- Particle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterDocument5 pagesParticle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterjamesNo ratings yet
- Taking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridDocument21 pagesTaking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridJIGAR SURA100% (3)
- Disturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesDocument5 pagesDisturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesStefania OliveiraNo ratings yet
- Analysis of Electro-Hydraulic Proportional Speed CDocument9 pagesAnalysis of Electro-Hydraulic Proportional Speed CEduardo RibeiroNo ratings yet
- Icieeimt 2017 8116868Document5 pagesIcieeimt 2017 8116868godspower brunoNo ratings yet
- Pitch Control of Large Scale Wind Turbine Based On Expert PID ControlDocument4 pagesPitch Control of Large Scale Wind Turbine Based On Expert PID ControlDuyên Nguyễn NgọcNo ratings yet
- Control Design and Dynamic Performance Analysis of A Wind TurbinDocument5 pagesControl Design and Dynamic Performance Analysis of A Wind TurbinMdzayd EL FahimeNo ratings yet
- Direct Torque Control of PMSM Using Fuzz PDFDocument7 pagesDirect Torque Control of PMSM Using Fuzz PDFImam Muhammad HakimNo ratings yet
- 1 PBDocument10 pages1 PBaasfklNo ratings yet
- New Capacity Modulation Algorithm For Linear CompressorDocument7 pagesNew Capacity Modulation Algorithm For Linear CompressorFADI MalkawiNo ratings yet
- An IRFOC Drive Scheme For A SEIG Wind TuDocument6 pagesAn IRFOC Drive Scheme For A SEIG Wind TunouhailaNo ratings yet
- DTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedDocument6 pagesDTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedJevin ZackNo ratings yet
- G - Simulation Analysis of CSTR With Anti Integral WindupDocument7 pagesG - Simulation Analysis of CSTR With Anti Integral Windupkritikagre27No ratings yet
- 164 T494 PDFDocument6 pages164 T494 PDFSaksham PathrolNo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Jeas 0408 94Document7 pagesJeas 0408 94Jun Chee LimNo ratings yet
- A Novel Control Approach For A Thrust Vector System With An Electromechanical ActuatorDocument9 pagesA Novel Control Approach For A Thrust Vector System With An Electromechanical ActuatorVũ Kiên CNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Efectosde Los Harmonicos en MPPT 2016Document8 pagesEfectosde Los Harmonicos en MPPT 2016Taborda ErickNo ratings yet
- The Simulation and Experimental Results of Dynamic Behaviour of Torque Motor Having Permanent MagnetsDocument7 pagesThe Simulation and Experimental Results of Dynamic Behaviour of Torque Motor Having Permanent MagnetsessameldinNo ratings yet
- Comparative Analysis of PID, Cascade and Fuzzy Logic Control For The Efficient Temperature Control in CSTRDocument6 pagesComparative Analysis of PID, Cascade and Fuzzy Logic Control For The Efficient Temperature Control in CSTRVictoria Carrillo de AlbaNo ratings yet
- Paper 1Document7 pagesPaper 1Oscar Ruiz SerranoNo ratings yet
- Automatic Control System of Speed of Synchronous Motor: SciencedirectDocument6 pagesAutomatic Control System of Speed of Synchronous Motor: SciencedirectRedkit ofFootHillNo ratings yet
- Control Induction Motor: StrategyDocument8 pagesControl Induction Motor: StrategyMohan MatliNo ratings yet
- An Improved Method Damping Generator Oscillations: of ofDocument6 pagesAn Improved Method Damping Generator Oscillations: of ofPrasanna DharmapriyaNo ratings yet
- Application of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorDocument5 pagesApplication of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorChetan GhatageNo ratings yet
- THREE-PHASE INDUCTION MOTOR DIRECT TORQUE CONTROLDocument7 pagesTHREE-PHASE INDUCTION MOTOR DIRECT TORQUE CONTROLMuhamad AsbiNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- Step-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterDocument6 pagesStep-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterAMIR SOHAILNo ratings yet
- HVDC Link Fault Impacts Turbine GeneratorDocument8 pagesHVDC Link Fault Impacts Turbine GeneratorMuhammad ArifinNo ratings yet
- Paris, FranceICSTEM (2019)Document6 pagesParis, FranceICSTEM (2019)Dr. D. V. KamathNo ratings yet
- 1 s2.0 S1876610213012162 MainDocument11 pages1 s2.0 S1876610213012162 MainMohamed AlNo ratings yet
- Ce 2 PDFDocument72 pagesCe 2 PDFDivya RajanNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- Sliding ControllerDocument15 pagesSliding ControllerAkshay ArksaliNo ratings yet
- Zhangxingyuan 2010Document3 pagesZhangxingyuan 2010satish lukkaNo ratings yet
- Neuro-Fuzzy DTC for DFIM Reactive Power ControlDocument7 pagesNeuro-Fuzzy DTC for DFIM Reactive Power ControlAves de Herveo - TolimaNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Closed Loop Control Design of Two Inductor Current-Fed Isolated DC-DC Converter For Fuel Cells To Utility Interface ApplicationDocument8 pagesClosed Loop Control Design of Two Inductor Current-Fed Isolated DC-DC Converter For Fuel Cells To Utility Interface ApplicationNagababuMutyalaNo ratings yet
- Malah Et Al. - 2020 - Backstepping Controllers Design For A Grid Connected Wind-Photovoltaic Hybrid Power System-AnnotatedDocument6 pagesMalah Et Al. - 2020 - Backstepping Controllers Design For A Grid Connected Wind-Photovoltaic Hybrid Power System-AnnotatedMohamed Riyad BoudallaaNo ratings yet
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 pagesA D-Q Synchronous Frame Controller For Single Phase InvertershanNo ratings yet
- Dc-Link Voltage Control of A Single-Phase (Imp)Document6 pagesDc-Link Voltage Control of A Single-Phase (Imp)Roshan PradhanNo ratings yet
- Advances in Vector Control Ofac Motor Drives A Review PDFDocument24 pagesAdvances in Vector Control Ofac Motor Drives A Review PDFBook4AllNo ratings yet
- Check Fig 5Document7 pagesCheck Fig 5Sureshkumar AlagarsamyNo ratings yet
- Hinf Controller Design For A Variable Wind SpeedDocument7 pagesHinf Controller Design For A Variable Wind SpeedDiego Fernando Sanchez FlorezNo ratings yet
- Paper 2 PDFDocument4 pagesPaper 2 PDFJose MedinaNo ratings yet
- An Introduction to Proportional-Integral-Derivative (PID) ControllersDocument47 pagesAn Introduction to Proportional-Integral-Derivative (PID) ControllersAmar BeheraNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- Fuzzy logic improves direct torque and flux control of induction machinesDocument6 pagesFuzzy logic improves direct torque and flux control of induction machinesAbdesslam LokritiNo ratings yet
- Backstepping Control of Wind Energy System With Multilevel InverterDocument6 pagesBackstepping Control of Wind Energy System With Multilevel InvertermahaNo ratings yet
- Alberto Soto Lock Edison R. Da Silva Malik E. Elbuluk Darlan A. FernandesDocument7 pagesAlberto Soto Lock Edison R. Da Silva Malik E. Elbuluk Darlan A. FernandesOnur CanNo ratings yet
- Simulation of A Prototype Electrically Powered Integrated Actuator For Civil AircraftDocument14 pagesSimulation of A Prototype Electrically Powered Integrated Actuator For Civil AircraftdavpaffNo ratings yet
- Adrc IetDocument6 pagesAdrc IetDileep VarmaNo ratings yet
- Banko: Transfer Function Analysis of Strain G GESDocument38 pagesBanko: Transfer Function Analysis of Strain G GESMikaelNo ratings yet
- Modeling and Simulation of Single Phase CycloconvertorDocument3 pagesModeling and Simulation of Single Phase CycloconvertorijeteeditorNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Callister - Fundamentals of Materials Science and Engineering 5e HQDocument2 pagesCallister - Fundamentals of Materials Science and Engineering 5e HQsathwikNo ratings yet
- Signal Processor Scientist (G11) - DRDA SS70 - DRDA SS90 - 220707Document5 pagesSignal Processor Scientist (G11) - DRDA SS70 - DRDA SS90 - 220707ArgaardNo ratings yet
- Hydraunycoil FH 2: Synthetic Hydraulic FluidDocument1 pageHydraunycoil FH 2: Synthetic Hydraulic FluidArgaardNo ratings yet
- Aalco Metals LTD Aluminium Alloy 6082 T6T651 Sheet 335Document2 pagesAalco Metals LTD Aluminium Alloy 6082 T6T651 Sheet 335ArgaardNo ratings yet
- Aalco Metals LTD Aluminium Alloy 6082 T6T651 Sheet 335Document2 pagesAalco Metals LTD Aluminium Alloy 6082 T6T651 Sheet 335ArgaardNo ratings yet
- Range: Keeping The World FlowingDocument52 pagesRange: Keeping The World FlowingArgaardNo ratings yet
- (Not So) Legendary ActionsDocument4 pages(Not So) Legendary ActionsKevinShields0% (1)
- Hobbitus Ille The Latin HobbitDocument2 pagesHobbitus Ille The Latin HobbitArgaard0% (2)
- PID Studies On Position Tracking Control of An Electro-Hydraulic ActuatorDocument7 pagesPID Studies On Position Tracking Control of An Electro-Hydraulic ActuatorArgaardNo ratings yet
- Higher Order Sliding Mode Controllers With Optimal Reaching: Francesco Dinuzzo, Antonella Ferrara, Senior MemberDocument11 pagesHigher Order Sliding Mode Controllers With Optimal Reaching: Francesco Dinuzzo, Antonella Ferrara, Senior MemberArgaardNo ratings yet
- PID Controller Optimization by GA and Its Performances On The Electro-Hydraulic Servo Control SystemDocument7 pagesPID Controller Optimization by GA and Its Performances On The Electro-Hydraulic Servo Control SystemArgaardNo ratings yet
- Higher Order Sliding Mode Controllers With Optimal Reaching: Francesco Dinuzzo, Antonella Ferrara, Senior MemberDocument11 pagesHigher Order Sliding Mode Controllers With Optimal Reaching: Francesco Dinuzzo, Antonella Ferrara, Senior MemberArgaardNo ratings yet
- 22 OraniDocument145 pages22 OraniArgaardNo ratings yet
- 13 PisanoDocument124 pages13 PisanoArgaardNo ratings yet
- Some Fancy Fonts Some Fancy Fonts Some Fancy Fonts S: Test WordDocument1 pageSome Fancy Fonts Some Fancy Fonts Some Fancy Fonts S: Test Wordhooho443No ratings yet
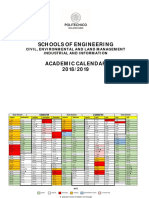
- ING Calendario Per Polimi - ENGLISH PDFDocument3 pagesING Calendario Per Polimi - ENGLISH PDFArgaardNo ratings yet
- Cat Sos 793&793b TrucksDocument7 pagesCat Sos 793&793b TrucksmkNo ratings yet
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocument5 pagesDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemNo ratings yet
- Nook Jack CatalogDocument212 pagesNook Jack CatalogSakahi SharmaNo ratings yet
- Chapter Three:: Kinetics of Particles: Newton's Second LawDocument44 pagesChapter Three:: Kinetics of Particles: Newton's Second LawSalahadin ShemsuNo ratings yet
- Gravity Sewer Acceptance Testing Results Sheet: Sewer Pipeline Pressure TestDocument1 pageGravity Sewer Acceptance Testing Results Sheet: Sewer Pipeline Pressure TestLulouch Raiz100% (1)
- Body Builders Guide PDFDocument216 pagesBody Builders Guide PDFvo phuongNo ratings yet
- ASTM A153 Guide for Galvanized Hardware & FastenersDocument5 pagesASTM A153 Guide for Galvanized Hardware & FastenersMekhmanNo ratings yet
- January 2009 QP - Unit 1 Edexcel PhysicsDocument19 pagesJanuary 2009 QP - Unit 1 Edexcel PhysicsnaamashirNo ratings yet
- AMP Summer Question Paper (Msbte Study Resources)Document4 pagesAMP Summer Question Paper (Msbte Study Resources)Varad DateNo ratings yet
- Mechanism and Robot Kinematics: Anirvan DasguptaDocument122 pagesMechanism and Robot Kinematics: Anirvan Dasguptaसुमित शर्माNo ratings yet
- Metsec Engineering Forms the FutureDocument24 pagesMetsec Engineering Forms the Futureshashank adigaNo ratings yet
- Your First Day Lifeguarding: How To Vacuum and Backwash A PoolDocument4 pagesYour First Day Lifeguarding: How To Vacuum and Backwash A PoolMattMonroeNo ratings yet
- Dex39 1540 - REV 01Document1 pageDex39 1540 - REV 01Navneet RankNo ratings yet
- Characterization of Hybrid Aluminum Matrix Composites For Advanced Applications - A ReviewDocument11 pagesCharacterization of Hybrid Aluminum Matrix Composites For Advanced Applications - A ReviewMr. K.S. Raghul Asst Prof MECHNo ratings yet
- 3314 Ijmech 11Document8 pages3314 Ijmech 11Burak KoyuncuogluNo ratings yet
- TD302REC: Specifications Standard EquipmentDocument2 pagesTD302REC: Specifications Standard EquipmentfuffinoNo ratings yet
- Basics of Foundation Design PDFDocument433 pagesBasics of Foundation Design PDFGnkdsNo ratings yet
- Group Assignment Q1Document2 pagesGroup Assignment Q1Muhdhadi SajariNo ratings yet
- PEM Economy Gauge 1Document5 pagesPEM Economy Gauge 1kprasannanNo ratings yet
- AM1101 Structures KSDocument62 pagesAM1101 Structures KSKnowledge MiningNo ratings yet
- EMTOP Tools Guide: Affordable Power Tools & Hand ToolsDocument32 pagesEMTOP Tools Guide: Affordable Power Tools & Hand ToolsDIELECTRIC INSTALACIONES S.A.SNo ratings yet
- Autoscan P12 04 16 enDocument12 pagesAutoscan P12 04 16 enCouscoussiere GrandgazNo ratings yet
- BS en 12334-2001Document14 pagesBS en 12334-2001Udit Kumar SarkarNo ratings yet
- Wiring Diagram V7Document1 pageWiring Diagram V7NadeeshNo ratings yet
- Carnot CycleDocument11 pagesCarnot CycleEngr RbNo ratings yet
- AP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98Document4 pagesAP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98LUKASNo ratings yet
- Shubham Gaikwad 163014 Seminar ReportDocument21 pagesShubham Gaikwad 163014 Seminar ReportShubham GaikwadNo ratings yet
- Cressi-Sub Regulator User Manual: 1st Stage ComponentsDocument39 pagesCressi-Sub Regulator User Manual: 1st Stage ComponentsSergio GlezNo ratings yet
- Self-Check 1-1: Submitted by On 3/9/2012 5:21:18 PMDocument219 pagesSelf-Check 1-1: Submitted by On 3/9/2012 5:21:18 PMblue4882No ratings yet