You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Pedro's Journal Writing PromptsDocument1 pagePedro's Journal Writing PromptsElizabeth Jackson QueirozNo ratings yet
- The Mystery of The Bermuda Triangle: by Tushar JindalDocument30 pagesThe Mystery of The Bermuda Triangle: by Tushar JindalTusharNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
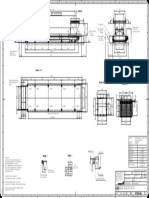
- Belt Drive LH: Projectionsmeth.1 ISO5456-2Document1 pageBelt Drive LH: Projectionsmeth.1 ISO5456-2Traian SerbanNo ratings yet
- 01 Rig List January 2016Document17 pages01 Rig List January 2016ifebrianNo ratings yet
- Economical Design of An Extra Dosed Bridge On 2Document16 pagesEconomical Design of An Extra Dosed Bridge On 2Ashok AgarwalNo ratings yet
- Installation and Maintenance: Part Number: 4240 en - 2017.08 / CDocument28 pagesInstallation and Maintenance: Part Number: 4240 en - 2017.08 / CTraian SerbanNo ratings yet
- Imfinity 3-Phase Induction Motors: Ie2 High Efficiency & Ie3 Premium Efficiency and Ie4 Super Premium Efficiency MotorsDocument156 pagesImfinity 3-Phase Induction Motors: Ie2 High Efficiency & Ie3 Premium Efficiency and Ie4 Super Premium Efficiency MotorsTraian SerbanNo ratings yet
- Whitepaper EarthingDocument25 pagesWhitepaper EarthingTraian SerbanNo ratings yet
- AN0321 Obtaining The Greater or Lesser of Two SignalsDocument5 pagesAN0321 Obtaining The Greater or Lesser of Two SignalsTraian SerbanNo ratings yet
- Nidec CPLS MotorsDocument68 pagesNidec CPLS MotorsTraian SerbanNo ratings yet
- AN0127 Guidlines For Common Bus ConnectionDocument8 pagesAN0127 Guidlines For Common Bus ConnectionTraian SerbanNo ratings yet
- AN0355 Commander SK CTSoft BackupDocument11 pagesAN0355 Commander SK CTSoft BackupTraian SerbanNo ratings yet
- Commander General Purpose AC Variable Speed Drives BrochureDocument28 pagesCommander General Purpose AC Variable Speed Drives BrochureTraian SerbanNo ratings yet
- Pump Drive F600 User Guide Issue 1Document463 pagesPump Drive F600 User Guide Issue 1Traian SerbanNo ratings yet
- F600 Frame 3 To 11 Step by Step Guide Issue 3Document46 pagesF600 Frame 3 To 11 Step by Step Guide Issue 3Traian SerbanNo ratings yet
- Control Techniques F600Document24 pagesControl Techniques F600Traian SerbanNo ratings yet
- Unidrive General Purpose Drives m200 m300 Brochure DownloadDocument20 pagesUnidrive General Purpose Drives m200 m300 Brochure DownloadTraian SerbanNo ratings yet
- IND Converting WP Tension Control Center WindersDocument13 pagesIND Converting WP Tension Control Center WindersTraian SerbanNo ratings yet
- Electric Project Documentation: . +A PROJECT 2507 1. Information PLUG-SPRAY2507Document5 pagesElectric Project Documentation: . +A PROJECT 2507 1. Information PLUG-SPRAY2507Traian SerbanNo ratings yet
- Commander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCDocument2 pagesCommander C200 AC Drives: Enhance Throughput With Machine Safety, Communications, and Built-In PLCTraian SerbanNo ratings yet
- Eplan Manual 03Document10 pagesEplan Manual 03Traian SerbanNo ratings yet
- Schema Electrica Masina Prelucrare Tamburi CabluDocument68 pagesSchema Electrica Masina Prelucrare Tamburi CabluTraian SerbanNo ratings yet
- Setpoint & Actual Value Source SelectionsDocument35 pagesSetpoint & Actual Value Source SelectionsTraian SerbanNo ratings yet
- Se History Brands March2005 PDFDocument32 pagesSe History Brands March2005 PDFTraian SerbanNo ratings yet
- Revised Guidelines On Industry Transport DisciplineDocument12 pagesRevised Guidelines On Industry Transport DisciplinearunenggNo ratings yet
- CV Ahmad Yani PDFDocument3 pagesCV Ahmad Yani PDFAhmad YaniNo ratings yet
- Mackenzie Bus TimetableDocument4 pagesMackenzie Bus TimetableSarah LauNo ratings yet
- MS Holdings Offer Document PDFDocument217 pagesMS Holdings Offer Document PDFInvest StockNo ratings yet
- Peugeot Partner Tepee HandbookDocument14 pagesPeugeot Partner Tepee HandbookcucumucuNo ratings yet
- Aircraft ECSDocument31 pagesAircraft ECSevelyn jayaNo ratings yet
- 6B Advanced Gas Path (AGP) : Output, Efficiency, and Availability SolutionDocument1 page6B Advanced Gas Path (AGP) : Output, Efficiency, and Availability SolutionMahesh MishraNo ratings yet
- ResearchgatepreprintDocument12 pagesResearchgatepreprintBhavik MehtaNo ratings yet
- International LawDocument4 pagesInternational Lawaa teohNo ratings yet
- Volkswagen TransporterDocument3 pagesVolkswagen TransporterTasawar ShahNo ratings yet
- 2012 Epic Racing Sponsorship ProposalDocument3 pages2012 Epic Racing Sponsorship ProposalTroy HopwoodNo ratings yet
- 3 CervantesDocument1 page3 CervantesLuis CervantesNo ratings yet
- LamborghiniDocument14 pagesLamborghiniRichard AustinNo ratings yet
- System PracticesDocument27 pagesSystem PracticesMechanicalNo ratings yet
- Electronic Slot Booking SlipDocument2 pagesElectronic Slot Booking SlipVishwanathSrinivasNo ratings yet
- Charting: Doc 8168: VOL II Part I Section 4 Chapter 9Document24 pagesCharting: Doc 8168: VOL II Part I Section 4 Chapter 9SufiNo ratings yet
- Elevated Causeway System (ELCAS)Document4 pagesElevated Causeway System (ELCAS)伊善强No ratings yet
- Mov Tanker To Storage TankDocument555 pagesMov Tanker To Storage Tankabi ridwan davidsNo ratings yet
- Engine Core Arr GPDocument3 pagesEngine Core Arr GPERIC ERICNo ratings yet
- Advisory Circular: U.S. Department of TransportationDocument129 pagesAdvisory Circular: U.S. Department of TransportationMohammed AlsbeayNo ratings yet
- Prestwick TRN 1K 1L Standard Departure Chart - Instrument (Sid) - IcaoDocument14 pagesPrestwick TRN 1K 1L Standard Departure Chart - Instrument (Sid) - IcaoCarlos DomingosNo ratings yet
- Wireless Sensor Networks For Civil Infrastructure MonitoringDocument22 pagesWireless Sensor Networks For Civil Infrastructure MonitoringTruc PhanNo ratings yet
- Bahasa Inggris BAB VIDocument4 pagesBahasa Inggris BAB VIAgus SulistionoNo ratings yet
- Soal Latihan Pas Gasal XiDocument5 pagesSoal Latihan Pas Gasal Xikunyuk muriNo ratings yet
- 11 - Heavy Truck Rollover Crashworthiness Utilizing Sled Impact TestingDocument15 pages11 - Heavy Truck Rollover Crashworthiness Utilizing Sled Impact TestingClaudio RodriguesNo ratings yet
- Fiat SDocument27 pagesFiat SAzizul AnwarNo ratings yet