You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- My Home-Made Bob Beck Electromagnetic PulserDocument15 pagesMy Home-Made Bob Beck Electromagnetic Pulserrosfinxxx938367% (3)
- Air PurgingDocument14 pagesAir PurgingjgdberizoNo ratings yet
- Module 5Document47 pagesModule 5dnes9999No ratings yet
- Manage bank account statementDocument6 pagesManage bank account statementYATINDER DAHIYANo ratings yet
- Aeroplane Aerodynamics, Structures & SystemsDocument389 pagesAeroplane Aerodynamics, Structures & Systemsadityarana531No ratings yet
- Business Intelligence PDFDocument215 pagesBusiness Intelligence PDFBernardo CastilloNo ratings yet
- Zone and ATA Chapter PDFDocument25 pagesZone and ATA Chapter PDFdnes9999No ratings yet
- Tutorials 2Document3 pagesTutorials 2dnes9999No ratings yet
- Installing Bind in UbuntuDocument4 pagesInstalling Bind in Ubuntudnes9999No ratings yet
- Linux 102 ExaminationDocument236 pagesLinux 102 Examinationjesuscalixto1No ratings yet
- Symbolic links, archives, compression and package managementDocument4 pagesSymbolic links, archives, compression and package managementdnes9999No ratings yet
- Junior MCC Controller: Duties and ResponsibilitiesDocument1 pageJunior MCC Controller: Duties and Responsibilitiesdnes9999No ratings yet
- Example Runge KuttaDocument11 pagesExample Runge Kuttadnes9999No ratings yet
- Release Notes For Airn@V Associated DataDocument4 pagesRelease Notes For Airn@V Associated Datadnes9999No ratings yet
- Mil HDBK 274a PDFDocument61 pagesMil HDBK 274a PDFGeoffrey AlleyneNo ratings yet
- MatLab Dev For Civil EngDocument182 pagesMatLab Dev For Civil EngRyan SooknarineNo ratings yet
- W ('I14/I1Flcf 14'4 01: FCNFRDocument5 pagesW ('I14/I1Flcf 14'4 01: FCNFRdnes9999No ratings yet
- Solutions 3: Adaptive Quadrature Rule ExamplesDocument7 pagesSolutions 3: Adaptive Quadrature Rule Examplesdnes9999No ratings yet
- Runge KuttaDocument2 pagesRunge KuttaMichael Calizo PacisNo ratings yet
- D2i I5 PDFDocument47 pagesD2i I5 PDFPathy AmeNo ratings yet
- ARINC 429 StudyDocument28 pagesARINC 429 Studysatyams222No ratings yet
- 5Document96 pages5dnes9999No ratings yet
- Module 07 MCQDocument120 pagesModule 07 MCQdnes9999No ratings yet
- Syllabus1 PDFDocument3 pagesSyllabus1 PDFdnes9999No ratings yet
- 5.15 Typical Aircraft Instrument SystemsDocument44 pages5.15 Typical Aircraft Instrument Systemsdnes9999No ratings yet
- Vertical Speed Air Speed Mach Number Pitot Static Pressure Electromechanical Computers F-111 F-14Document1 pageVertical Speed Air Speed Mach Number Pitot Static Pressure Electromechanical Computers F-111 F-14dnes9999No ratings yet
- 4 Analog PDFDocument34 pages4 Analog PDFAditya VyasNo ratings yet
- Module 01 MathematicsDocument78 pagesModule 01 MathematicsBen JaafarNo ratings yet
- How restricting cell phone use affects student social interactionDocument1 pageHow restricting cell phone use affects student social interactiondnes9999No ratings yet
- Mod5 PDFDocument82 pagesMod5 PDFammarNo ratings yet
- Module 02 PhysicsDocument82 pagesModule 02 PhysicsSohaib Aslam ChaudharyNo ratings yet
- Me Rosh Are FormDocument2 pagesMe Rosh Are Formanon_15744721No ratings yet
- Audit FindingDocument1 pageAudit Findingdnes9999No ratings yet
- Open Findings MDDocument1 pageOpen Findings MDdnes9999No ratings yet
- Wii Okami ManualDocument25 pagesWii Okami Manualbeatrizascensao.workNo ratings yet
- Enforcing Microsoft Active Directory Policies Using LDAP Attribute MapsDocument34 pagesEnforcing Microsoft Active Directory Policies Using LDAP Attribute MapsKaddour El HallaouiNo ratings yet
- United States District Court District of MassachusettsDocument16 pagesUnited States District Court District of Massachusettsbarzilay123No ratings yet
- Prototyping Benefits of Paper PrototypesDocument34 pagesPrototyping Benefits of Paper PrototypesDiman IonutNo ratings yet
- Neltec Color MG CDocument34 pagesNeltec Color MG CJavier Manuel IbanezNo ratings yet
- BIOS Configuration Utility User GuideDocument19 pagesBIOS Configuration Utility User GuidecornolioNo ratings yet
- When Will Computer Hardware Match The Human Brain - by Hans MoravecDocument10 pagesWhen Will Computer Hardware Match The Human Brain - by Hans MoravecCamilo Andrés Leiton TocarrunchoNo ratings yet
- What Is Linux Why There Are 100's of Linux OSDocument20 pagesWhat Is Linux Why There Are 100's of Linux OSdizelNo ratings yet
- MM-06 Invoice VerificationDocument23 pagesMM-06 Invoice VerificationRodrigo MadrigalNo ratings yet
- Certified Ethical Hacker: Ceh V10Document10 pagesCertified Ethical Hacker: Ceh V10Pragati sisodiyaNo ratings yet
- Computer PartsDocument36 pagesComputer PartsJed SorollaNo ratings yet
- Panasonic KW1M HDocument11 pagesPanasonic KW1M Hbole90No ratings yet
- SEC Form ICA-RRDocument1 pageSEC Form ICA-RRPatrick HarrisNo ratings yet
- Ht905ta-Al 5B1 5d.dirndlk lh-t778hts DeilamiDocument25 pagesHt905ta-Al 5B1 5d.dirndlk lh-t778hts DeilamifatiNo ratings yet
- Experiment 1: Aim: Configure Diodes and Transistor As Logic Gates and Digital Ics For Verification of Truth TableDocument14 pagesExperiment 1: Aim: Configure Diodes and Transistor As Logic Gates and Digital Ics For Verification of Truth TableManan MehtaNo ratings yet
- Asian Air Lines VisionDocument13 pagesAsian Air Lines VisionMusaab QamarNo ratings yet
- A Self-help App for Syrian Refugees with PTSDDocument51 pagesA Self-help App for Syrian Refugees with PTSDMiguel SobredoNo ratings yet
- AWS Simple-Icons v2.0Document10 pagesAWS Simple-Icons v2.0jonbaerNo ratings yet
- GD&T WikipediaDocument4 pagesGD&T WikipediaJayesh PatilNo ratings yet
- Surpass Hit 7080 PDFDocument2 pagesSurpass Hit 7080 PDFpeterNo ratings yet
- Image Enhancement RestorationDocument74 pagesImage Enhancement RestorationDarsh Singh0% (1)
- M95320 M95320-W M95320-R: 32 Kbit Serial Spi Bus Eeproms With High-Speed ClockDocument44 pagesM95320 M95320-W M95320-R: 32 Kbit Serial Spi Bus Eeproms With High-Speed ClockRobinson PaulinoNo ratings yet
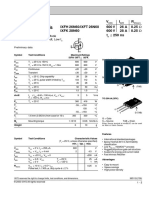
- Hiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsDocument2 pagesHiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsAmirNo ratings yet
- Uml 3 PGDocument114 pagesUml 3 PGGurwinder SinghNo ratings yet
- Client Server Network - Advantages and Disadvantages - I Answer 4 UDocument3 pagesClient Server Network - Advantages and Disadvantages - I Answer 4 UMahmudul HasanNo ratings yet
- OMEN by HP 17 Laptop PC: Maintenance and Service GuideDocument99 pagesOMEN by HP 17 Laptop PC: Maintenance and Service GuideGustavo TorresNo ratings yet