You might also like
- Ch1 - Laplace Transform L.T. - 26 Pgs PDFDocument26 pagesCh1 - Laplace Transform L.T. - 26 Pgs PDFMohamad Duhoki100% (1)
- FR-8x Editor Eng01 WDocument8 pagesFR-8x Editor Eng01 WRadulian Daniel100% (1)
- BD+ CD+ XD+ - tcm833-3534072Document20 pagesBD+ CD+ XD+ - tcm833-3534072MisterMMNo ratings yet
- Transmicion de CF 500, CF 600 PDFDocument337 pagesTransmicion de CF 500, CF 600 PDFgusspeSNo ratings yet
- High Integrity Aluminum (GENERAL)Document140 pagesHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- BKLT DeaeratorDocument24 pagesBKLT Deaeratormalikgaurav01No ratings yet
- Methods of Tube Expansion in Tube To TubDocument19 pagesMethods of Tube Expansion in Tube To Tubkurcek100% (1)
- ZF CAT EBook Oil-Filters-Construction-Agricultural-Machinery-Transmissions 50114 201806 V02 IN PDFDocument142 pagesZF CAT EBook Oil-Filters-Construction-Agricultural-Machinery-Transmissions 50114 201806 V02 IN PDFdeisy ortegaNo ratings yet
- Engine Maintenance PartsDocument13 pagesEngine Maintenance PartsSerkanAl100% (1)
- Skytrain Avia Services: Emergency Procedures ManualDocument32 pagesSkytrain Avia Services: Emergency Procedures ManualEndro RastadiNo ratings yet
- ELEN3012 Quizz 3 SolutionDocument5 pagesELEN3012 Quizz 3 SolutionBongani MofokengNo ratings yet
- Experiment 3Document12 pagesExperiment 3Sayaf KhanNo ratings yet
- EEC325 Chapter 1 1 1Document13 pagesEEC325 Chapter 1 1 1Bashir Abubakar AlkasimNo ratings yet
- Sinais e Sistemas - UFLA Atividade Remota 3Document4 pagesSinais e Sistemas - UFLA Atividade Remota 3MarcosNo ratings yet
- Chapter 14 Complex IntegrationDocument26 pagesChapter 14 Complex Integrationayewinko143No ratings yet
- ELEN3012 Quizz 2 SolutionDocument3 pagesELEN3012 Quizz 2 SolutionBongani MofokengNo ratings yet
- SalazarA-J ELEG631 Assignment1Document7 pagesSalazarA-J ELEG631 Assignment1alexsg5No ratings yet
- Solution - Assignment 1 Q#1Document4 pagesSolution - Assignment 1 Q#1Fahad SiddiqNo ratings yet
- MODULE 4 - Laplace TransformsDocument6 pagesMODULE 4 - Laplace TransformsIrene HugoNo ratings yet
- Learning Material 3 - Laplace TransformationDocument13 pagesLearning Material 3 - Laplace TransformationJade GurtizaNo ratings yet
- Clas 3Document1 pageClas 3CURSOS MENDOZANo ratings yet
- Transformada de LaplaceDocument3 pagesTransformada de LaplaceSantiago Arias MedinaNo ratings yet
- EjemploDocument5 pagesEjemploAngel Martinez NavaNo ratings yet
- Logarithmic DecrementDocument2 pagesLogarithmic DecrementnakulNo ratings yet
- Tutorial 4 Sol S21920Document5 pagesTutorial 4 Sol S21920Zhenjie YueNo ratings yet
- Laplace TransformDocument28 pagesLaplace TransformaliNo ratings yet
- ACTL30004 AssignmentDocument15 pagesACTL30004 AssignmentKeshavNo ratings yet
- EE 301 Signals & Systems Homework 2 Solutions: Problem 1Document12 pagesEE 301 Signals & Systems Homework 2 Solutions: Problem 1Cankan ÇelikNo ratings yet
- Carga Escalonada DinamicaDocument3 pagesCarga Escalonada DinamicaRicardo Carpio JaramilloNo ratings yet
- Econ107 Assignment 1 Answer Key: Question 1 (50 Marks)Document4 pagesEcon107 Assignment 1 Answer Key: Question 1 (50 Marks)Ives LeeNo ratings yet
- Formula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Document4 pagesFormula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Zain AhmedNo ratings yet
- Problems On DTFT DFT and IDTFTDocument3 pagesProblems On DTFT DFT and IDTFTSalsabill Hamed64No ratings yet
- Differentiation: Rule If F (X) Then F' (X) BasicDocument2 pagesDifferentiation: Rule If F (X) Then F' (X) BasicJo-LieAngNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- Sheet (2) (Laplace Transform)Document3 pagesSheet (2) (Laplace Transform)mostafa nasserNo ratings yet
- Chapter 2 - Solution To Worked ExamplesDocument6 pagesChapter 2 - Solution To Worked ExamplesJack LinesNo ratings yet
- Time Series Formula orDocument4 pagesTime Series Formula or2B Dai Ko DUPLICATENo ratings yet
- Laplace 3Document9 pagesLaplace 3bananaboooooootNo ratings yet
- MODULE 7 - Laplace Transforms of IntegralsDocument4 pagesMODULE 7 - Laplace Transforms of IntegralsIrene HugoNo ratings yet
- EEE 147 ReviewerDocument4 pagesEEE 147 Reviewerfrancojieo27No ratings yet
- Formulario Undad 3Document5 pagesFormulario Undad 3SERGIO FALCON CASIANONo ratings yet
- Find The Nyquist Plot of The Given Transfer Function 1. ( ) 2. ( ) 3. ( ) T 2, T 3Document6 pagesFind The Nyquist Plot of The Given Transfer Function 1. ( ) 2. ( ) 3. ( ) T 2, T 3Jayant MohantyNo ratings yet
- Formulario CalculoVectorialDocument2 pagesFormulario CalculoVectorialClaymohrNo ratings yet
- Formulario Calculo VerctorialDocument2 pagesFormulario Calculo VerctorialKEILA MERCADO MARTINEZNo ratings yet
- ELE8311 - Module 2 - The Z-TransformDocument19 pagesELE8311 - Module 2 - The Z-TransformUmarSaboBabaDoguwaNo ratings yet
- 02 Stage Process Models20-5802-16310280714100Document28 pages02 Stage Process Models20-5802-16310280714100Tle SupawidNo ratings yet
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- 05 NNDocument31 pages05 NNDebashish DekaNo ratings yet
- Laplce PDFDocument194 pagesLaplce PDFRama ThombareNo ratings yet
- ELEN3012 Quizz 1 SolutionDocument3 pagesELEN3012 Quizz 1 SolutionBongani MofokengNo ratings yet
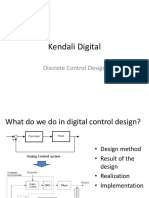
- Kendali Digital-4 - Discrete Control DesignDocument17 pagesKendali Digital-4 - Discrete Control DesignChinta WulandariNo ratings yet
- Chapterwise Formula-1Document3 pagesChapterwise Formula-1tunio.bscsf21No ratings yet
- A Rectangular Boundary Field For A New Euler-Riemanmn Zeta Function Interpretation (F.delplace)Document13 pagesA Rectangular Boundary Field For A New Euler-Riemanmn Zeta Function Interpretation (F.delplace)Miguel Ángel Acebo VisanzayNo ratings yet
- Lecture Chapter 3.1 (Time Response - Lecturer)Document13 pagesLecture Chapter 3.1 (Time Response - Lecturer)super junlinNo ratings yet
- Laplace Transform: Solution of Ordinary Differential EquationDocument17 pagesLaplace Transform: Solution of Ordinary Differential EquationArtika SeptianiNo ratings yet
- EE 301 Signals and Systems I Homework 4: (Due Dec. 15, 2019)Document10 pagesEE 301 Signals and Systems I Homework 4: (Due Dec. 15, 2019)Cankan ÇelikNo ratings yet
- Chap 04 Solutions Ex 4 2 CalculusDocument9 pagesChap 04 Solutions Ex 4 2 Calculusasghar786023No ratings yet
- Beta Gamma Function Unit IDocument16 pagesBeta Gamma Function Unit IDhiren PanditNo ratings yet
- Numerical - Method-PPT Final 1Document92 pagesNumerical - Method-PPT Final 1Md.Hasibur RahmanNo ratings yet
- Transfer Processes in Food Engineering-FT207 Assignment: Name: Ayan Bhattacharjee Roll No.: FPB15009Document8 pagesTransfer Processes in Food Engineering-FT207 Assignment: Name: Ayan Bhattacharjee Roll No.: FPB15009pratik sinhaNo ratings yet
- ISE521 Project ReportDocument10 pagesISE521 Project ReportDidik HariadiNo ratings yet
- Formulario Mate IV - M. PatlánDocument2 pagesFormulario Mate IV - M. PatlánKaren CardonaNo ratings yet
- Formula RioDocument1 pageFormula RioSer BlancNo ratings yet
- 5 Maks Qs - Ans II PU MathematicsDocument27 pages5 Maks Qs - Ans II PU MathematicsMirza SabeelNo ratings yet
- Formula Rio PotenciaDocument2 pagesFormula Rio PotenciaKELY PILCONo ratings yet
- Introduction To Digital Communications 1st Edition Grami Solutions ManualDocument8 pagesIntroduction To Digital Communications 1st Edition Grami Solutions Manualpeery.brutadwbjy100% (20)
- Module - Laplace TransformDocument12 pagesModule - Laplace TransformlanzNo ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- CSP RecruitmentFlyer WHA 2018Document1 pageCSP RecruitmentFlyer WHA 2018Solayman Salindato MasoNo ratings yet
- Digital Storytelling WorkbookDocument18 pagesDigital Storytelling WorkbookSolayman Salindato MasoNo ratings yet
- CoD YLDocument2 pagesCoD YLSolayman Salindato MasoNo ratings yet
- 14.09.20 Shujaaz Inc - Barometer and CompassDocument22 pages14.09.20 Shujaaz Inc - Barometer and CompassSolayman Salindato MasoNo ratings yet
- Alpi Toolkit v2Document19 pagesAlpi Toolkit v2Solayman Salindato MasoNo ratings yet
- Business Leadership CouncilDocument1 pageBusiness Leadership CouncilSolayman Salindato MasoNo ratings yet
- GenDem Charter 2021Document12 pagesGenDem Charter 2021Solayman Salindato MasoNo ratings yet
- Lecture 5 - Power CalculationsDocument21 pagesLecture 5 - Power CalculationsSolayman Salindato MasoNo ratings yet
- Erasmus Mundus Master Course in Sustainable Transportation and Electrical Power Systems Power ElectronicsDocument2 pagesErasmus Mundus Master Course in Sustainable Transportation and Electrical Power Systems Power ElectronicsSolayman Salindato MasoNo ratings yet
- Power Electronics Lecture 4: The MOSFET and The IGBTDocument16 pagesPower Electronics Lecture 4: The MOSFET and The IGBTSolayman Salindato MasoNo ratings yet
- Power Electronics Lecture 7: DC-DC Converters 2Document16 pagesPower Electronics Lecture 7: DC-DC Converters 2Solayman Salindato MasoNo ratings yet
- Techniques For Digital ControlDocument7 pagesTechniques For Digital ControlSolayman Salindato MasoNo ratings yet
- Lecture 3 - ThyristorDocument16 pagesLecture 3 - ThyristorSolayman Salindato MasoNo ratings yet
- Review of Previous LecturesDocument7 pagesReview of Previous LecturesSolayman Salindato MasoNo ratings yet
- Receiving Material Procedure (Done) (Sudah Direvisi)Document8 pagesReceiving Material Procedure (Done) (Sudah Direvisi)Hardika SambilangNo ratings yet
- Meai Mar 2010Document36 pagesMeai Mar 2010Daneshwer VermaNo ratings yet
- Cache MemoryDocument20 pagesCache MemoryKeshav Bharadwaj RNo ratings yet
- U042en PDFDocument12 pagesU042en PDFTatiya TatiyasoponNo ratings yet
- BIOS 203: Free Energy Methods Tom MarklandDocument23 pagesBIOS 203: Free Energy Methods Tom MarklandNemanja ĐokovićNo ratings yet
- BM 81004 MuvDocument52 pagesBM 81004 MuvHamza Abbasi AbbasiNo ratings yet
- David Lowe Thesis PDFDocument201 pagesDavid Lowe Thesis PDFKRISHNA VAMSHINo ratings yet
- Advance Logic Activity On CountersDocument31 pagesAdvance Logic Activity On CountersKrinx BuliganNo ratings yet
- Help - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)Document8 pagesHelp - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)ĐinhĐứcAnhNo ratings yet
- Manual CRM-91H 93H 9SDocument2 pagesManual CRM-91H 93H 9SFilip FilipovicNo ratings yet
- Acceleration GrpahDocument14 pagesAcceleration GrpahRAFAEL TORRESNo ratings yet
- Parallel Port Programming (PART 1) With CDocument13 pagesParallel Port Programming (PART 1) With ChertzoliNo ratings yet
- E 7016 Product-SheetDocument1 pageE 7016 Product-SheetAlireza TakrimiNo ratings yet
- Gathering Network RequirementsDocument30 pagesGathering Network RequirementsAmin ZangetsuNo ratings yet
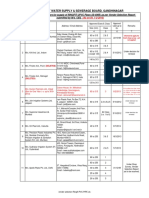
- GWSSB Vendor List 19.11.2013Document18 pagesGWSSB Vendor List 19.11.2013sivesh_rathiNo ratings yet
- Hot Wire Anemometry HandoutDocument4 pagesHot Wire Anemometry HandoutZ-BNo ratings yet
- Schematic Lenovo ThinkPad T410 NOZOMI-1Document99 pagesSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampNo ratings yet
- Psychrometric Chart - Us and Si UnitsDocument1 pagePsychrometric Chart - Us and Si UnitsRaden_Rici_Abi_1914No ratings yet
- Chapter 7 Notes Computer OrganizationDocument20 pagesChapter 7 Notes Computer OrganizationsriNo ratings yet
- Riscv SpecDocument32 pagesRiscv SpeckartimidNo ratings yet