You might also like
- IR Remote Controlled CarDocument36 pagesIR Remote Controlled CarHabib Ur RehmanNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Engine Timing Belt Replacement Guide for 1.6L EcoBoost C-MAX 2011-2012Document11 pagesEngine Timing Belt Replacement Guide for 1.6L EcoBoost C-MAX 2011-2012SenaMecánicaElectrónica100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Wiring Diagram FH PC04 July 2013Document300 pagesWiring Diagram FH PC04 July 2013Izz Bahar100% (3)
- Infineon - Brochure - Motor ControlDocument42 pagesInfineon - Brochure - Motor ControlRyan AngelesNo ratings yet
- Gravimetric FeederDocument47 pagesGravimetric FeederYousuf Ali67% (3)
- Toyota 5.7L-346ci-V8 Torque Specifications - TorkSpec - Knowledge For The MotorheadDocument16 pagesToyota 5.7L-346ci-V8 Torque Specifications - TorkSpec - Knowledge For The MotorheadBilly PageNo ratings yet
- Same Engines Spare PartsDocument98 pagesSame Engines Spare PartsAdrian Macaya100% (1)
- Cat C32 ACERT Spec Sheet - CommercialDocument12 pagesCat C32 ACERT Spec Sheet - Commercialzzsq3550% (2)
- Kalmar DRF 450 EngineDocument32 pagesKalmar DRF 450 Enginetuấn anh nguyễn100% (1)
- Development of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsDocument8 pagesDevelopment of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsK. JayarajanNo ratings yet
- Porsche Boston Matrix AnalysisDocument27 pagesPorsche Boston Matrix AnalysisArun KumarNo ratings yet
- Microcontroller Traffic Light Controller Project ReportDocument26 pagesMicrocontroller Traffic Light Controller Project ReportRahul Sharma100% (1)
- Motor Control: High-Voltage: V & I SenseDocument5 pagesMotor Control: High-Voltage: V & I Sensenjc6151No ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Wireless DC Motor Speed and Direction Control Using RFDocument3 pagesWireless DC Motor Speed and Direction Control Using RFNidhin MnNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- "An Era of Esteem": Indus Motor Company LTDDocument39 pages"An Era of Esteem": Indus Motor Company LTDhaidershahtirmizi67% (3)
- Object Detection ReportDocument48 pagesObject Detection ReportAnonymous 1aqlkZNo ratings yet
- Industrial Motor ControlDocument12 pagesIndustrial Motor Controlganesh madhav kendreNo ratings yet
- ROMET 2022 Catalog - KatalógusDocument280 pagesROMET 2022 Catalog - KatalógusROMET KerékpárNo ratings yet
- Schema Fonctionnel PDFDocument2 pagesSchema Fonctionnel PDFTiago RomeroNo ratings yet
- Military RadarDocument25 pagesMilitary Radar9611117426No ratings yet
- Main PPT Speed Control System With Rfid Equipped VehicleDocument27 pagesMain PPT Speed Control System With Rfid Equipped VehicleSujatha GoliNo ratings yet
- Solid State Circuit Breaker PDFDocument7 pagesSolid State Circuit Breaker PDFifmatosNo ratings yet
- Brushless DC Motor Control Using The LPC2141Document18 pagesBrushless DC Motor Control Using The LPC2141Deepa DevarajNo ratings yet
- Brake by Wire1Document21 pagesBrake by Wire1AdilNo ratings yet
- Electrical Systems & Traction Alternator DesignDocument11 pagesElectrical Systems & Traction Alternator DesignVangara HarshuNo ratings yet
- 10th International Symposium on Electrical and Power EngineeringDocument4 pages10th International Symposium on Electrical and Power EngineeringMarkoMarkovicNo ratings yet
- BAMOCAR Motor ControllerDocument46 pagesBAMOCAR Motor ControllerShehzer100% (1)
- Speed Control with RFID TagsDocument27 pagesSpeed Control with RFID TagsAnonymous L9fB0XUNo ratings yet
- Brake by Wire1Document21 pagesBrake by Wire1Srikanth HunterNo ratings yet
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocument17 pagesSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123No ratings yet
- Density Based Traffic Control System + Strate Light + Destance MeterDocument21 pagesDensity Based Traffic Control System + Strate Light + Destance MeterAmita RakhitNo ratings yet
- Simplified Sensorless Control For BLDC MDocument12 pagesSimplified Sensorless Control For BLDC MAlg DimasNo ratings yet
- Current Source InvertersDocument3 pagesCurrent Source InvertersgghussainNo ratings yet
- Paris, FranceICSTEM (2019)Document6 pagesParis, FranceICSTEM (2019)Dr. D. V. KamathNo ratings yet
- The Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunDocument9 pagesThe Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunMarco LisiNo ratings yet
- Krest EEE Mini ProjectsDocument6 pagesKrest EEE Mini ProjectsAtul KumarNo ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- DC Drive Using P WM Techniques For TreadmillDocument5 pagesDC Drive Using P WM Techniques For Treadmillyosi kopretNo ratings yet
- Wireless DC Motor Speed Control System Using IgbtDocument5 pagesWireless DC Motor Speed Control System Using Igbtparasuraman535No ratings yet
- Tire Pressure Monitoring SystemDocument5 pagesTire Pressure Monitoring SystemaruncidNo ratings yet
- Automatic Clutch and Braking System ControlDocument23 pagesAutomatic Clutch and Braking System ControlStartechnico TechnocratsNo ratings yet
- Design and Implementation of A Novel WPT System For Railway ApplicationsDocument4 pagesDesign and Implementation of A Novel WPT System For Railway Applicationss.selva9566No ratings yet
- Overview of Industrial Motor Control SystemsDocument8 pagesOverview of Industrial Motor Control Systemsiwuo4797No ratings yet
- Pti1000 Esd5100 SeriesDocument2 pagesPti1000 Esd5100 SeriesRamon Thales DomeniconiNo ratings yet
- White Paper: Gate Drive Optocouplers For HEV Electric Motor InvertersDocument3 pagesWhite Paper: Gate Drive Optocouplers For HEV Electric Motor InvertersvishiwizardNo ratings yet
- MR 647681 enDocument512 pagesMR 647681 enISRAEL RAMAL AMAYANo ratings yet
- M XxuywDocument13 pagesM XxuywRenganathan KrishnanNo ratings yet
- Control of Automated Guided Vehicle With PLC Simatic Et200S CpuDocument6 pagesControl of Automated Guided Vehicle With PLC Simatic Et200S CpuHo Van RoiNo ratings yet
- Haptic Feedback Vibration Alerting For Handheld Products - OriginalDocument16 pagesHaptic Feedback Vibration Alerting For Handheld Products - OriginalSriraj G.S.No ratings yet
- Yalla UpgradeDocument10 pagesYalla UpgradeBrett HendricksNo ratings yet
- Line Follower Robot With IntelligenceDocument11 pagesLine Follower Robot With IntelligenceSabhakant Tripathi0% (1)
- ID 610C Carver Intro To Motor ControlDocument46 pagesID 610C Carver Intro To Motor Control조용규No ratings yet
- Hills Train Power Generation Automatic Railway Gate Control 8821 YPf52T0Document10 pagesHills Train Power Generation Automatic Railway Gate Control 8821 YPf52T0BANOTH KUMAR0% (1)
- Digital Protective RelayDocument3 pagesDigital Protective RelayjannumitsNo ratings yet
- LifiDocument21 pagesLifiAnonymous QIuAGIadXmNo ratings yet
- Communication Antenna Switching System Based On Micro ControllerDocument4 pagesCommunication Antenna Switching System Based On Micro ControllerAjay Kumar YadavNo ratings yet
- Control of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerDocument7 pagesControl of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerHarsha VardhanNo ratings yet
- Slyy 027Document7 pagesSlyy 027Tung DaoNo ratings yet
- Paper - 5 Noise MinimizationDocument5 pagesPaper - 5 Noise MinimizationLTE002No ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Leaf Diseases Detection Using Image ProcessingDocument3 pagesLeaf Diseases Detection Using Image ProcessingAnonymous 1aqlkZNo ratings yet
- Dehaze DocxDocument17 pagesDehaze DocxAnonymous 1aqlkZNo ratings yet
- Paddy ReportDocument38 pagesPaddy ReportAnonymous 1aqlkZNo ratings yet
- Fusion Similarity-Based Re-Ranking For Sar Image Retrieval: AbstractDocument1 pageFusion Similarity-Based Re-Ranking For Sar Image Retrieval: AbstractAnonymous 1aqlkZNo ratings yet
- Unsupervised Visual Hashing With Semantic Assistant For Content-Based Image RetrievalDocument1 pageUnsupervised Visual Hashing With Semantic Assistant For Content-Based Image RetrievalAnonymous 1aqlkZNo ratings yet
- Selective Convolutional Descriptor Aggregation For Fine-Grained Image RetrievalDocument1 pageSelective Convolutional Descriptor Aggregation For Fine-Grained Image RetrievalAnonymous 1aqlkZNo ratings yet
- Wavelet-Based Total Variation and Nonlocal Similarity Model For Image DenoisingDocument4 pagesWavelet-Based Total Variation and Nonlocal Similarity Model For Image DenoisingAnonymous 1aqlkZNo ratings yet
- Secure Reversible Image Data Hiding Over Encrypted Domain Via Key ModulationDocument5 pagesSecure Reversible Image Data Hiding Over Encrypted Domain Via Key ModulationAnonymous 1aqlkZNo ratings yet
- Optimized Blind Image Watermarking Method Based On Firefly Algorithm in DWT-QR Transform DomainDocument3 pagesOptimized Blind Image Watermarking Method Based On Firefly Algorithm in DWT-QR Transform DomainAnonymous 1aqlkZNo ratings yet
- Retrieval Compensated Group Structured Sparsity For Image Super-ResolutionDocument2 pagesRetrieval Compensated Group Structured Sparsity For Image Super-ResolutionAnonymous 1aqlkZNo ratings yet
- Semi-Supervised Online Multi-Kernel Similarity Learning CBIRDocument1 pageSemi-Supervised Online Multi-Kernel Similarity Learning CBIRAnonymous 1aqlkZNo ratings yet
- Colour Image Watermarking Based On Wavelet and QR DecompositionDocument4 pagesColour Image Watermarking Based On Wavelet and QR DecompositionAnonymous 1aqlkZNo ratings yet
- Image Cryptography With Secret Data CommunicationDocument4 pagesImage Cryptography With Secret Data CommunicationAnonymous 1aqlkZNo ratings yet
- Age AbstractDocument2 pagesAge AbstractAnonymous 1aqlkZNo ratings yet
- Deep Representations for Iris, Face, and Fingerprint Spoofing DetectionDocument3 pagesDeep Representations for Iris, Face, and Fingerprint Spoofing DetectionAnonymous 1aqlkZNo ratings yet
- Rough-Set-Based Color Channel SelectionDocument4 pagesRough-Set-Based Color Channel SelectionAnonymous 1aqlkZNo ratings yet
- Automated Melanoma Recognition Via Very Deep Residual NetworksDocument2 pagesAutomated Melanoma Recognition Via Very Deep Residual NetworksAnonymous 1aqlkZNo ratings yet
- IEEE Titles 2017-18: Image Processing, Big Data, Android ProjectsDocument2 pagesIEEE Titles 2017-18: Image Processing, Big Data, Android ProjectsAnonymous 1aqlkZNo ratings yet
- MATLAB Digital Image and Video Projects 2017-2018Document3 pagesMATLAB Digital Image and Video Projects 2017-2018Anonymous 1aqlkZNo ratings yet
- Matlab With EmbeddedDocument1 pageMatlab With EmbeddedAnonymous 1aqlkZNo ratings yet
- Secure Reversible Image Data Hiding Over Encrypted Domain Via Key ModulationDocument5 pagesSecure Reversible Image Data Hiding Over Encrypted Domain Via Key ModulationAnonymous 1aqlkZNo ratings yet
- SPMA09Document5 pagesSPMA09Anonymous 1aqlkZNo ratings yet
- Matlab ArtsDocument3 pagesMatlab ArtsAnonymous 1aqlkZNo ratings yet
- PAPR Reduction in OFDM using Reduced Complexity PTS with CompandingDocument3 pagesPAPR Reduction in OFDM using Reduced Complexity PTS with CompandingAnonymous 1aqlkZNo ratings yet
- Colour Image Watermarking Based On Wavelet and QR DecompositionDocument4 pagesColour Image Watermarking Based On Wavelet and QR DecompositionAnonymous 1aqlkZNo ratings yet
- Intrinsic Interference Based Physical Layer Encryption for OFDM/OQAMDocument4 pagesIntrinsic Interference Based Physical Layer Encryption for OFDM/OQAMAnonymous 1aqlkZNo ratings yet
- Automated Melanoma Recognition Via Very Deep Residual NetworksDocument2 pagesAutomated Melanoma Recognition Via Very Deep Residual NetworksAnonymous 1aqlkZNo ratings yet
- Turning colorization into efficient color compressionDocument1 pageTurning colorization into efficient color compressionAnonymous 1aqlkZNo ratings yet
- Classification Via Sparse Representation of Steerable Wavelet Frames On Grassmann Manifold: Application To Target Recognition in Sar ImageDocument1 pageClassification Via Sparse Representation of Steerable Wavelet Frames On Grassmann Manifold: Application To Target Recognition in Sar ImageAnonymous 1aqlkZNo ratings yet
- Supplemental Restraint System (SRS) : SectionDocument64 pagesSupplemental Restraint System (SRS) : SectionLino Bello RezamanoNo ratings yet
- Service Bulletin Corrections for CK20 Tractor Workshop ManualDocument3 pagesService Bulletin Corrections for CK20 Tractor Workshop ManualDmitryNo ratings yet
- 970E IIIA 20 PG A4 Broch - 03 - 2020Document11 pages970E IIIA 20 PG A4 Broch - 03 - 2020Sandeep Kumar100% (1)
- Cub Cadet Parts Manual For Model 7300 TractorDocument20 pagesCub Cadet Parts Manual For Model 7300 Tractorchad100% (50)
- Peugeot 405 SLX interior satisfies with modern featuresDocument2 pagesPeugeot 405 SLX interior satisfies with modern featuresAim50% (2)
- Hyundai Shehzore Pickup Deletion Program DetailsDocument39 pagesHyundai Shehzore Pickup Deletion Program DetailsFeroz GullNo ratings yet
- Initial Quick Test LogDocument7 pagesInitial Quick Test Logpro-techNo ratings yet
- Honda Accord 2014 Owners ManualDocument593 pagesHonda Accord 2014 Owners ManualSANTOSHANDIAPPA THANEERMALAI A/L KANESAN MoeNo ratings yet
- Icu KeypadDocument84 pagesIcu Keypadcarlos maradiagaNo ratings yet
- Wheel Loader: Engine Gross Power Operating Weight Bucket CapacityDocument16 pagesWheel Loader: Engine Gross Power Operating Weight Bucket CapacityAbo Achraf LaalawiNo ratings yet
- Rishabh Jain - Minor Project ReportDocument41 pagesRishabh Jain - Minor Project ReportJaspreet SinghNo ratings yet
- Zoomlion Crawler Cranes Spec 83a2ecDocument32 pagesZoomlion Crawler Cranes Spec 83a2echamza bayramNo ratings yet
- Fastag Number DeclarationDocument2 pagesFastag Number DeclarationAKSHAY GAIKWADNo ratings yet
- CCK Series: In-Line Belt Driven Cabinet FanDocument3 pagesCCK Series: In-Line Belt Driven Cabinet FanAsifur RahmanNo ratings yet
- Diesel Information: Vehicle ElectronicsDocument6 pagesDiesel Information: Vehicle ElectronicsAminadavNo ratings yet
- Bajaj Order3Document6 pagesBajaj Order3shobhanauto.shopNo ratings yet
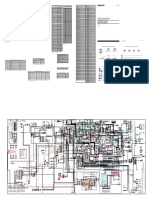
- 844 Wheel Tractor Electrical System: Machine Harness Connector and Component LocationsDocument2 pages844 Wheel Tractor Electrical System: Machine Harness Connector and Component LocationsGilvan JuniorNo ratings yet
- Full Hydraulic Steering System ExplainedDocument3 pagesFull Hydraulic Steering System ExplainedGomzalez Bin GembozNo ratings yet
- BMW Vs Audi Who Is Underdog in ChinaDocument5 pagesBMW Vs Audi Who Is Underdog in ChinaKhandoker Mahafuz-uz ZamanNo ratings yet
- Lecture12 and 13 - Analysis Unsignalized IntersectionDocument34 pagesLecture12 and 13 - Analysis Unsignalized IntersectionSai KumarNo ratings yet