You might also like
- Transformator InstrumentDocument36 pagesTransformator InstrumentErwin EfendyNo ratings yet
- Kedip TenganganDocument30 pagesKedip TenganganAan AhmadNo ratings yet
- Test TrasnformerDocument28 pagesTest TrasnformerTrigras Bangun PerkasaNo ratings yet
- 05 - Analisa Aliran DayaDocument8 pages05 - Analisa Aliran Dayafalen100% (1)
- Teknik Transmisi Dan Distribusi Saluran 150 kVDocument3 pagesTeknik Transmisi Dan Distribusi Saluran 150 kVRidwan SyaifulNo ratings yet
- Relai Diferensial BiasDocument10 pagesRelai Diferensial BiasNyoman Budi DharmawanNo ratings yet
- Type Dan Data Sutt Yg Dipakai PLN P3BDocument1 pageType Dan Data Sutt Yg Dipakai PLN P3BRini SabrinaNo ratings yet
- Cara Memilih Kabel DayaDocument48 pagesCara Memilih Kabel DayaRio SitanggangNo ratings yet
- Hitung Kapasitor BankDocument81 pagesHitung Kapasitor BankMaksum Solikhin50% (2)
- PENGADAAN PLTS PUSKESMASDocument2 pagesPENGADAAN PLTS PUSKESMASAdiWotu100% (1)
- Rekonduktor SUTT 150 kV Kraksaan - ProbolinggoDocument6 pagesRekonduktor SUTT 150 kV Kraksaan - ProbolinggoAlif Maulana Firdaus100% (1)
- Istilah Singkatan Di PLNDocument6 pagesIstilah Singkatan Di PLNbudysteriNo ratings yet
- Perhitungan Pada Sistem ProteksiDocument5 pagesPerhitungan Pada Sistem ProteksiIsmail WahyudiNo ratings yet
- TeleprotectionDocument11 pagesTeleprotectionronaldNo ratings yet
- PMT Mangnet (Pemutus Tenaga Listrik)Document4 pagesPMT Mangnet (Pemutus Tenaga Listrik)FauzanNo ratings yet
- Perhitungan Perencanaan KabelDocument12 pagesPerhitungan Perencanaan KabelAchmad Nuriel AnwarNo ratings yet
- Pentanahan Netral SistemDocument25 pagesPentanahan Netral SistemEko SusantoNo ratings yet
- Pemeliharaan Kapasitor, Reaktor Dan SVCDocument37 pagesPemeliharaan Kapasitor, Reaktor Dan SVChanifzuraidaNo ratings yet
- Daerah Kerja ProtreksiDocument44 pagesDaerah Kerja Protreksipremanwarnet100% (1)
- Protective RelayDocument43 pagesProtective RelayAlfan FathNo ratings yet
- 3-2 Batasan Nilai KVARH Agar Tidak Kena Denda PLNDocument7 pages3-2 Batasan Nilai KVARH Agar Tidak Kena Denda PLNMiftakhul KhoirudinNo ratings yet
- Menentukan Penghantar Pada Instalasi ListrikDocument13 pagesMenentukan Penghantar Pada Instalasi ListrikFranky Roi SiahaanNo ratings yet
- MV Current TransformerDocument50 pagesMV Current TransformerRizki Rhamdan YusupNo ratings yet
- Setting RelayDocument3 pagesSetting RelayImroatul MufidaNo ratings yet
- Perancangan Proteksi Petir Eksternal Rolling SphereDocument14 pagesPerancangan Proteksi Petir Eksternal Rolling SphereMUHAMMAD IHSAN NURIYA 171724021No ratings yet
- SIMULASI-LISTRIKDocument10 pagesSIMULASI-LISTRIKaji.isramboNo ratings yet
- TDL 7Document34 pagesTDL 7AndyArifAsmoroNo ratings yet
- Relai Jarak (Distance Relay) - Cok PDFDocument32 pagesRelai Jarak (Distance Relay) - Cok PDFzionees01100% (1)
- Proteksi System 66kVDocument50 pagesProteksi System 66kVsyaiful anamNo ratings yet
- 1.1. Overview Filosofi Proteksi Jaringan Dan Gardu IndukDocument96 pages1.1. Overview Filosofi Proteksi Jaringan Dan Gardu IndukRicchie G SihiteNo ratings yet
- Calculate Batt UpsDocument3 pagesCalculate Batt Upsdenny tobingNo ratings yet
- Pengukuran Energi Listrik dengan CT dan PTDocument9 pagesPengukuran Energi Listrik dengan CT dan PTMuha ArigaNo ratings yet
- PERHITUNGAN BEBAN DAN DESAIN TRAFODocument56 pagesPERHITUNGAN BEBAN DAN DESAIN TRAFOsyafrizkaNo ratings yet
- 4a. Perhitungan Kabel Sutr Berdasarkan Drop TeganganDocument12 pages4a. Perhitungan Kabel Sutr Berdasarkan Drop TeganganRifanNo ratings yet
- Brosur Transmisi PLP LowDocument6 pagesBrosur Transmisi PLP LowRizki KresnaNo ratings yet
- Kaidah Setting OCR dan GFRDocument4 pagesKaidah Setting OCR dan GFRAlit WigunawanNo ratings yet
- SEJARAH PLNDocument33 pagesSEJARAH PLNIwayan AnugrahNo ratings yet
- OPTIMASI HARMONISADocument34 pagesOPTIMASI HARMONISAagus triprasetyo100% (2)
- Menghitung Besarnya Jatuh Tegangan Di LintasDocument5 pagesMenghitung Besarnya Jatuh Tegangan Di Lintasb1767yjNo ratings yet
- PEMELIHARAAN PERALATAN LISTRIK (Minyak Trafo)Document16 pagesPEMELIHARAAN PERALATAN LISTRIK (Minyak Trafo)Yasser Akbar NasutionNo ratings yet
- PERATURAN UMUM INSTALASI PENANGKAL PETIRDocument3 pagesPERATURAN UMUM INSTALASI PENANGKAL PETIRSuta AdnyanaNo ratings yet
- Bab Iv Analisa Karakteristik Relay Ref 610 Merk Abb Sebagai Pembatas Daya Dan Pengaman Hubung Singkat Pada Tegangan MenengahDocument15 pagesBab Iv Analisa Karakteristik Relay Ref 610 Merk Abb Sebagai Pembatas Daya Dan Pengaman Hubung Singkat Pada Tegangan MenengahAnonymous cfAZ5eNo ratings yet
- EtapDocument15 pagesEtapMazmur IrawanNo ratings yet
- Tutorial Etap 7.5Document121 pagesTutorial Etap 7.5Alvien ZuhairNo ratings yet
- Pentanahan Sistem Tegangan RendahDocument30 pagesPentanahan Sistem Tegangan Rendahanon_581912892100% (1)
- Simulasi Load Flow Analysis ETAP 12 Power Station PDFDocument18 pagesSimulasi Load Flow Analysis ETAP 12 Power Station PDFRizkiAryoJatiKusumo75% (4)
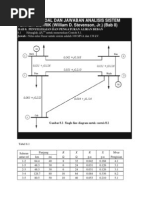
- Kumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Document20 pagesKumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Arief Kurniawan50% (4)
- Dasar Teori CTDocument4 pagesDasar Teori CTIndah CharismasariNo ratings yet
- Analisis Tegangan Tembus Kabel Instalasi ListrikDocument8 pagesAnalisis Tegangan Tembus Kabel Instalasi ListrikLilian AdityaNo ratings yet
- Tugas 1 Rekapitulasi Daya Listrik PDFDocument1 pageTugas 1 Rekapitulasi Daya Listrik PDFLuthfanNo ratings yet
- Arus InrushDocument18 pagesArus InrushwirawaanNo ratings yet
- Segitiga DayaDocument2 pagesSegitiga DayaAldiNo ratings yet
- MAKALAH Voltage SwellDocument11 pagesMAKALAH Voltage SwellMokhammad SholehNo ratings yet
- Instalasi Listrik RusunawaDocument5 pagesInstalasi Listrik RusunawaRahardian TristantoNo ratings yet
- untuk Dokumen Pedoman Pemeliharaan Lightning ArresterDocument76 pagesuntuk Dokumen Pedoman Pemeliharaan Lightning Arresteradi wirajayaNo ratings yet
- RAMADONI Transmisi&DistribusiDocument45 pagesRAMADONI Transmisi&DistribusiabiyzellNo ratings yet
- Materi Instalasi ListrikDocument84 pagesMateri Instalasi Listrikbernike dariusNo ratings yet
- BAB IV Short CircuitDocument11 pagesBAB IV Short CircuitInggrit Izzatul A'iniNo ratings yet
- BAB IV Short CircuitDocument13 pagesBAB IV Short CircuitNasrul RozikinNo ratings yet
- BAB IV Short CircuitDocument15 pagesBAB IV Short CircuitHalda Ababiela ArzinNo ratings yet
- Draft Buku Saku DigitalDocument50 pagesDraft Buku Saku DigitalayyishNo ratings yet
- 01 Pergub No. 132 Tahun 2007 (Izin Pelaku Teknis Bangunan)Document11 pages01 Pergub No. 132 Tahun 2007 (Izin Pelaku Teknis Bangunan)LinggaNo ratings yet
- Paparan Inventarisasi BMD 2023Document10 pagesPaparan Inventarisasi BMD 2023ayyishNo ratings yet
- Rencana Kota JakartaDocument2 pagesRencana Kota JakartaayyishNo ratings yet
- PergubDKI 57 2014 PDFDocument62 pagesPergubDKI 57 2014 PDFEndiNo ratings yet
- Pedoman Persyaratan Teknis Bangunan Gedung PDFDocument107 pagesPedoman Persyaratan Teknis Bangunan Gedung PDFRiyan_LiebeNo ratings yet
- OPTIMASI ELEKTRIKDocument35 pagesOPTIMASI ELEKTRIKayyishNo ratings yet
- (Hunian, RTH, Industri) Sosialisasi Pergub Nomor 31 Tahun 2022 Jakarta BaratDocument53 pages(Hunian, RTH, Industri) Sosialisasi Pergub Nomor 31 Tahun 2022 Jakarta BaratayyishNo ratings yet
- HSE Keselamatan KonstruksiDocument42 pagesHSE Keselamatan KonstruksiayyishNo ratings yet
- Pergub No 25 Tahun 2013Document12 pagesPergub No 25 Tahun 2013ayyishNo ratings yet
- Ujian Tengah Semester - Ppkons - 09Document1 pageUjian Tengah Semester - Ppkons - 09ayyishNo ratings yet
- Uu No 2 2017-Jasa-KonstruksiDocument69 pagesUu No 2 2017-Jasa-KonstruksiayyishNo ratings yet
- Bab 2 (Sistem Telepon)Document7 pagesBab 2 (Sistem Telepon)ayyishNo ratings yet
- PM 06 Project Planning 5 - QualityDocument25 pagesPM 06 Project Planning 5 - QualityayyishNo ratings yet
- Perda RDTR Dan PZ PDFDocument444 pagesPerda RDTR Dan PZ PDFRDTR DKI JAKARTA100% (3)
- Penerapan Peraturan Perundangan BGHDocument77 pagesPenerapan Peraturan Perundangan BGHayyishNo ratings yet
- Pergub No 175 Tahun 20131Document4 pagesPergub No 175 Tahun 20131reedhidNo ratings yet
- PENG-1-PP-2017 Pengumuman PMB PKN STAN 2017 PDFDocument6 pagesPENG-1-PP-2017 Pengumuman PMB PKN STAN 2017 PDFBayuNo ratings yet
- Kuisioner PDFDocument6 pagesKuisioner PDFayyishNo ratings yet
- Peraturan Gubernur Provinsi Daerah Khusus Ibukota Jakarta Nomor 129 Tahun 2012 Tentang Tata Cara Pemberian Pelayanan Di Bidang Perizinan Bangunan PDFDocument60 pagesPeraturan Gubernur Provinsi Daerah Khusus Ibukota Jakarta Nomor 129 Tahun 2012 Tentang Tata Cara Pemberian Pelayanan Di Bidang Perizinan Bangunan PDFMelodyNo ratings yet
- 01 Pergub No. 132 Tahun 2007 (Izin Pelaku Teknis Bangunan)Document11 pages01 Pergub No. 132 Tahun 2007 (Izin Pelaku Teknis Bangunan)LinggaNo ratings yet
- 22 Permen No 5 Tahun 1985 Pesawat Angkat AngkutDocument27 pages22 Permen No 5 Tahun 1985 Pesawat Angkat AngkutsstibisNo ratings yet
- Permen Pu No 05-Prt-m-2014 Pedoman Sistem Manajemen k3 Konstruksi Bidang PuDocument41 pagesPermen Pu No 05-Prt-m-2014 Pedoman Sistem Manajemen k3 Konstruksi Bidang PuSpecialonez100% (3)
- Peraturan Perundang-Undangan K3Document793 pagesPeraturan Perundang-Undangan K3Mumu Haddad96% (27)
- Peraturan Perundang-Undangan K3Document793 pagesPeraturan Perundang-Undangan K3Mumu Haddad96% (27)
- Analisis Data Pke SpssDocument39 pagesAnalisis Data Pke SpssFaulina Yosia PanjaitanNo ratings yet
- Perda 08 Tahun 2008.pemadam KebakaranDocument39 pagesPerda 08 Tahun 2008.pemadam KebakaranaribobNo ratings yet
- Rencana Tata Ruang Wilayah 2030 - DkiDocument71 pagesRencana Tata Ruang Wilayah 2030 - Dkipriy4ntoNo ratings yet
- TUGAS, KEWAJIBAN DAN WEWENANG DEPARTEMEN PROYEK - Arkidea Architect's Kemang 1 PDFDocument141 pagesTUGAS, KEWAJIBAN DAN WEWENANG DEPARTEMEN PROYEK - Arkidea Architect's Kemang 1 PDFayyishNo ratings yet