You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Face Recognition Using PCADocument23 pagesFace Recognition Using PCArajali gintingNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Machine Learning For Human BeingsDocument105 pagesMachine Learning For Human Beingsrajali gintingNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Eng - Najah.edu Sites Eng - Najah.edu Files FingerprintrecognitionDocument74 pagesEng - Najah.edu Sites Eng - Najah.edu Files Fingerprintrecognitionvpal967No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Comparison of SIFT and Harris Conner Features For Correspondence Points MatchingDocument4 pagesA Comparison of SIFT and Harris Conner Features For Correspondence Points Matchingrajali gintingNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Lmari - Accuracy, Trueness, and PrecisionDocument12 pagesLmari - Accuracy, Trueness, and Precisionchristiana_mNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Autonomous Rovers For Mars ExplorationDocument15 pagesAutonomous Rovers For Mars Explorationrajali gintingNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Simulink Getting StartedDocument90 pagesSimulink Getting Startedmaxellligue5487No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 01 DTG2D3 ELKOM DNN Radio-Frequency-Passive-ComponentDocument13 pages01 DTG2D3 ELKOM DNN Radio-Frequency-Passive-Componentrajali gintingNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Rajali GintingDocument28 pagesRajali Gintingrajali gintingNo ratings yet
- Mini CNC PlotterDocument2 pagesMini CNC Plotterrajali gintingNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Main Part of PresentationDocument24 pagesMain Part of Presentationrajali gintingNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- IBM Security Verify Sales Fundamentals Level 1 Quiz Attempt ReviewDocument11 pagesIBM Security Verify Sales Fundamentals Level 1 Quiz Attempt ReviewBBMNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Digital Multimeter: Instruction ManualDocument1 pageDigital Multimeter: Instruction Manualphuong leNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- ELS 13 Agustus 2022 RevDocument16 pagesELS 13 Agustus 2022 RevYANNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- LSE400S Tutorial 1Document1 pageLSE400S Tutorial 1Willy K. Ng'etichNo ratings yet
- Fireclass Overview Presentation PDFDocument34 pagesFireclass Overview Presentation PDFRamon Mendoza PantojaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Takeuforward Org C Vector in C STLDocument3 pagesTakeuforward Org C Vector in C STLDesi GamersNo ratings yet
- M IV ServiceMAN 00223 PDFDocument228 pagesM IV ServiceMAN 00223 PDFcomphome100% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Server Virtualization Seminar PresentationDocument40 pagesServer Virtualization Seminar PresentationhanzkhanNo ratings yet
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Document7 pagesSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoNo ratings yet
- Computerized Sales and Inventory System For 3K A.D Agliam Construction SupplyDocument25 pagesComputerized Sales and Inventory System For 3K A.D Agliam Construction SupplyRica Jhoy De VeraNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- De Thi Thu Vao THPT 2022 - Online 03.4.2022Document5 pagesDe Thi Thu Vao THPT 2022 - Online 03.4.2022mai.nguyen.thi.phuongNo ratings yet
- Weekly Home Learning Plan: Empowerment Technologies S.Y 2020-2021 1 SemesterDocument4 pagesWeekly Home Learning Plan: Empowerment Technologies S.Y 2020-2021 1 SemesterGlenzchie Taguibao90% (10)
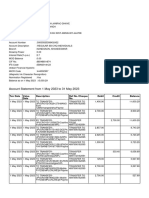
- Account Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument10 pagesAccount Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit Balanceavinashdeshmukh7027No ratings yet
- MSC AerospaceDocument4 pagesMSC AerospaceskhurramqNo ratings yet
- 9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaDocument4 pages9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaRodrigoBurgosNo ratings yet
- S6206 Thales Point MachineDocument32 pagesS6206 Thales Point Machineمعتز يحيى100% (2)
- Cross Tech Comm.Document11 pagesCross Tech Comm.Tirth PatelNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Fanuc 16 - E Maintenance ManualDocument314 pagesFanuc 16 - E Maintenance Manualadeiv20027197100% (1)
- Literature Survey On LTEDocument5 pagesLiterature Survey On LTETalluri GuptaNo ratings yet
- ServiceNow Interview QuestionerDocument3 pagesServiceNow Interview QuestionerrajendergrrNo ratings yet
- Kurukshetra University, Kurukshetra: Roll N0.-cum-Admit CardDocument2 pagesKurukshetra University, Kurukshetra: Roll N0.-cum-Admit CardANKIT ranaNo ratings yet
- Compendio Académico UNI Álgebra-LumbrerasDocument320 pagesCompendio Académico UNI Álgebra-LumbrerasmagnoliaNo ratings yet
- Ebook PDF Business Analytics 3rd Edition by Jeffrey D Camm PDFDocument41 pagesEbook PDF Business Analytics 3rd Edition by Jeffrey D Camm PDFshirley.gallo357100% (40)
- Volume 209Document237 pagesVolume 209Hatem HadiaNo ratings yet
- 7-1B Systems of Linear Equations GraphingDocument23 pages7-1B Systems of Linear Equations GraphingDimas HakriNo ratings yet
- Logic Made Easy WarringDocument58 pagesLogic Made Easy WarringVladimir MisataNo ratings yet
- Etec 404Document11 pagesEtec 404Akhilesh ChaudhryNo ratings yet
- Section 1Document10 pagesSection 1Alfin GithuNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Networking AssignmentDocument53 pagesNetworking AssignmentManish SahNo ratings yet
- Diagramas AveoDocument21 pagesDiagramas AveoAdrian PeñaNo ratings yet