You might also like
- Ee432 Power Electronics: Dr. Ali M. Eltamaly King Saud UniversityDocument79 pagesEe432 Power Electronics: Dr. Ali M. Eltamaly King Saud Universityollata kalanoNo ratings yet
- Design of Solar Powered Induction Motor Drive For Pumping ApplicationDocument10 pagesDesign of Solar Powered Induction Motor Drive For Pumping Applicationollata kalanoNo ratings yet
- Labvolt Series 9063: Data Acquisition and Control InterfaceDocument2 pagesLabvolt Series 9063: Data Acquisition and Control Interfaceollata kalanoNo ratings yet
- Network Services and ApplicationsDocument50 pagesNetwork Services and Applicationsollata kalanoNo ratings yet
- Experiment 4, Part 1Document7 pagesExperiment 4, Part 1ollata kalanoNo ratings yet
- Slide 5 - InvertersDocument27 pagesSlide 5 - InvertersYimy Garcia100% (1)
- Course Title of Energy Conversion and Rural ElectrificationDocument2 pagesCourse Title of Energy Conversion and Rural Electrificationollata kalano100% (1)
- Homework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017Document3 pagesHomework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017ollata kalanoNo ratings yet
- Chapter 3Document66 pagesChapter 3ollata kalanoNo ratings yet
- Unit-1 Magnetic CircuitDocument52 pagesUnit-1 Magnetic Circuitollata kalanoNo ratings yet
- Lecture Notes Electrical Machines IV Code: CECE437 Level: Four Points: 100 25+15+60Document15 pagesLecture Notes Electrical Machines IV Code: CECE437 Level: Four Points: 100 25+15+60ollata kalanoNo ratings yet
- Evaluating The Level of Harmonic Distortion in A Typical Distribu PDFDocument124 pagesEvaluating The Level of Harmonic Distortion in A Typical Distribu PDFollata kalanoNo ratings yet
- Huawei AI OverviewDocument69 pagesHuawei AI OverviewminatoonNo ratings yet
- SAP Shortcut Keys PDFDocument5 pagesSAP Shortcut Keys PDFHarish KumarNo ratings yet
- Chapter 21 Harmonic Analysis PSCADDocument48 pagesChapter 21 Harmonic Analysis PSCADgtgreat100% (3)
- Course Title of Computer Applications in Power SystemsDocument2 pagesCourse Title of Computer Applications in Power Systemsollata kalano100% (3)
- AI-ques-ans-Unit-1 Prof. Anuj Khanna KOITDocument17 pagesAI-ques-ans-Unit-1 Prof. Anuj Khanna KOITAmit RawatNo ratings yet
- Load Flow Analysis: Modeling of Power System ComponentsDocument8 pagesLoad Flow Analysis: Modeling of Power System ComponentsSai SivaNo ratings yet
- Algoritmo Paar La Formacion Matriz de AdmitanciaDocument7 pagesAlgoritmo Paar La Formacion Matriz de Admitanciakinny1974No ratings yet
- Manufacturing Process of PP Woven BagsDocument17 pagesManufacturing Process of PP Woven Bagsollata kalano50% (2)
- Lecture 1Document28 pagesLecture 1Kamara KumaraNo ratings yet
- Measurement and Calculation of Harmonics in Distribution Power System With Connected Small Co-Generation Facility EtanDocument4 pagesMeasurement and Calculation of Harmonics in Distribution Power System With Connected Small Co-Generation Facility Etanollata kalanoNo ratings yet
- Measurement and Calculation of Harmonics in Distribution Power System With Connected Small Co-Generation Facility EtanDocument4 pagesMeasurement and Calculation of Harmonics in Distribution Power System With Connected Small Co-Generation Facility Etanollata kalanoNo ratings yet
- Investigating Cable Transfer ImpedanceDocument11 pagesInvestigating Cable Transfer Impedanceollata kalanoNo ratings yet
- Harmonic Resonance Mode AnalysisDocument9 pagesHarmonic Resonance Mode AnalysisJorge CamposNo ratings yet
- DLD Unit 1 PDFDocument14 pagesDLD Unit 1 PDFollata kalanoNo ratings yet
- From Several Sources To Be Routed Onto A Single LineDocument17 pagesFrom Several Sources To Be Routed Onto A Single Lineollata kalanoNo ratings yet
- Continuous: Sine WaveaDocument1 pageContinuous: Sine Waveaollata kalanoNo ratings yet
- Final Template SampleDocument8 pagesFinal Template SamplelisaNo ratings yet
- 5.60 Thermodynamics & Kinetics: Mit OpencoursewareDocument6 pages5.60 Thermodynamics & Kinetics: Mit OpencoursewarecaptainhassNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Transformer Fuse SelectionDocument4 pagesTransformer Fuse SelectionandrewNo ratings yet
- D y N A M I C S C: Instruction Manual and Experiment Guide For The PASCO Scientific Model ME-9430Document383 pagesD y N A M I C S C: Instruction Manual and Experiment Guide For The PASCO Scientific Model ME-9430Elzer Toro'No ratings yet
- Phys 105 PB1Document2 pagesPhys 105 PB1Princess Ghhela Pallega EpaNo ratings yet
- Astl CH1Document86 pagesAstl CH1fildzahsyafNo ratings yet
- Process ControlDocument20 pagesProcess ControlRexel Reedus100% (1)
- AED Design Requirements:: Breaker and Conductor SizingDocument4 pagesAED Design Requirements:: Breaker and Conductor SizingRicky Respondo TindocNo ratings yet
- Btech Mech 4 Sem Theory of Machines 1 btmc402 Aug 2022Document3 pagesBtech Mech 4 Sem Theory of Machines 1 btmc402 Aug 2022Abhishek singh (abhi.03)No ratings yet
- Chapter 14Document20 pagesChapter 14TarikuNo ratings yet
- N082 Building Science 101Document18 pagesN082 Building Science 101Kris NauthNo ratings yet
- Chapter 16 Compressible Flow: 16.1 Speed of SoundDocument42 pagesChapter 16 Compressible Flow: 16.1 Speed of SoundrenebbNo ratings yet
- Mod 8Document13 pagesMod 8api-3766872No ratings yet
- Current Electricity and Thermodynamics 1665320998Document5 pagesCurrent Electricity and Thermodynamics 1665320998Akshay PandeyNo ratings yet
- BUILDING UTILITIES 2 Building HVAC SystemsDocument142 pagesBUILDING UTILITIES 2 Building HVAC Systemsjona serranoNo ratings yet
- Science Notes IEBDocument62 pagesScience Notes IEBu22639684No ratings yet
- Electron Theory of SolidsDocument18 pagesElectron Theory of SolidsJoyitaNo ratings yet
- Auto Reset Over or Under Voltage Cutout: Electronics & Communication EngineeringDocument66 pagesAuto Reset Over or Under Voltage Cutout: Electronics & Communication EngineeringSai Krishna KodaliNo ratings yet
- Vibration Analysis of Pump Shaft Using Finite Element Analysis Software: A ReviewDocument10 pagesVibration Analysis of Pump Shaft Using Finite Element Analysis Software: A ReviewlalitNo ratings yet
- Density of Water TablesDocument1 pageDensity of Water TablesHaha ZazaNo ratings yet
- Max e3-ENGDocument16 pagesMax e3-ENGDamVent DamVentNo ratings yet
- Assignment 1 - Fluid StaticsDocument3 pagesAssignment 1 - Fluid StaticsaarijNo ratings yet
- Tal A40 - Tal A42 - Tal A44Document17 pagesTal A40 - Tal A42 - Tal A44BilalNo ratings yet
- Generation Connection - Protection Guidelines PDFDocument24 pagesGeneration Connection - Protection Guidelines PDFhung nguyenNo ratings yet
- VHF Gysel 3 DB Power Divider/Combiner: Veljko Crnadak, Member, IEEE, and Siniša TasićDocument4 pagesVHF Gysel 3 DB Power Divider/Combiner: Veljko Crnadak, Member, IEEE, and Siniša TasićAndy NGNo ratings yet
- Frequency Converters, 60Hz, 50Hz, 400Hz - GoHzDocument4 pagesFrequency Converters, 60Hz, 50Hz, 400Hz - GoHzNOELGREGORIONo ratings yet
- Electric Drives - EPM 451 - Module1modifiedDocument68 pagesElectric Drives - EPM 451 - Module1modifiedasmrsamir5No ratings yet
- Manual Eb30Document80 pagesManual Eb30Ignacio Quispe MaytaNo ratings yet
- Lecture 2 - Scalars and Vectors Vector Addition Using Triangle Law and Parallelogram Law For AdditionDocument18 pagesLecture 2 - Scalars and Vectors Vector Addition Using Triangle Law and Parallelogram Law For AdditionNasrullah AwalNo ratings yet
- Measuring DevicesDocument8 pagesMeasuring DevicesAisha GonzalesNo ratings yet
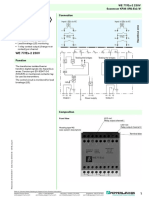
- We 77/ex-2 230V: Input I Eex Ia Iic Input Ii Eex Ia IicDocument3 pagesWe 77/ex-2 230V: Input I Eex Ia Iic Input Ii Eex Ia IicMohammad HosseinNo ratings yet
- Uk-Lr10 4 PDFDocument2 pagesUk-Lr10 4 PDFViệt Dương ĐứcNo ratings yet