You might also like
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaNo ratings yet
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoFrom EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoNo ratings yet
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorNo ratings yet
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasNo ratings yet
- Compensación de potencia reactiva en sistemas de distribuciónFrom EverandCompensación de potencia reactiva en sistemas de distribuciónRating: 5 out of 5 stars5/5 (1)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109From EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109No ratings yet
- Convertidores EolicosDocument15 pagesConvertidores EolicosPaul Ramos VegaNo ratings yet
- CLASE N°05 Centrales EólicasDocument25 pagesCLASE N°05 Centrales EólicasLuz MALLMA CHUQUILLANQUI100% (1)
- Energía Solar Fotovoltaica - Oscar Perpiñán Lamigueiro PDFDocument192 pagesEnergía Solar Fotovoltaica - Oscar Perpiñán Lamigueiro PDFRoberto Alday Delgadillo67% (3)
- Manual Programa Calculo IMEDEXSA 12Document177 pagesManual Programa Calculo IMEDEXSA 12Guillermo LockhartNo ratings yet
- Central CarboeléctricaDocument10 pagesCentral Carboeléctricabeto117kNo ratings yet
- Eje Del Rotor Caja MultiplicadoraDocument26 pagesEje Del Rotor Caja MultiplicadoraGIANCARLO SAMIR VALENCIA SERNAQUÉNo ratings yet
- Sistemas Electricos de PotenciaDocument32 pagesSistemas Electricos de Potenciayonny vargasNo ratings yet
- Reporte de La SubestacionDocument5 pagesReporte de La SubestacionMarcos Ponce CelisNo ratings yet
- UT 1 Cap1 Conceptos Basicos PDFDocument35 pagesUT 1 Cap1 Conceptos Basicos PDFViktor StarkNo ratings yet
- Prob AsincrDocument22 pagesProb Asincrmario nogueraNo ratings yet
- Centros de Transformación 1Document17 pagesCentros de Transformación 1rubénNo ratings yet
- Ensayo Monofasico y TrifasicoDocument6 pagesEnsayo Monofasico y Trifasicobook_book_3100% (1)
- EXPO 4 Subestaciones de Transformacion en Distribucion FINALDocument57 pagesEXPO 4 Subestaciones de Transformacion en Distribucion FINALAlberto Ordoñez TrujilloNo ratings yet
- Maquinas Electricas ProyectosDocument27 pagesMaquinas Electricas ProyectosJean Carlos Senmache TorresNo ratings yet
- Diagrama Unifilar EléctricoDocument8 pagesDiagrama Unifilar EléctricoMARLON MARTINEZ BARBANo ratings yet
- ELT 3721 Sistemas de DistribucionutoDocument117 pagesELT 3721 Sistemas de DistribucionutoEdilberto MJNo ratings yet
- ExamenDocument3 pagesExamenJavier SepulvedaNo ratings yet
- Tabla de KVA (Electrcidad)Document10 pagesTabla de KVA (Electrcidad)dan2616No ratings yet
- Sistema de Transmisión y SubDocument3 pagesSistema de Transmisión y SubJessikaNo ratings yet
- Modelado y Simulación de Un Sistema Fotovoltaico Conectado A La Red de Distribución en Baja Tensión 29-JunioDocument91 pagesModelado y Simulación de Un Sistema Fotovoltaico Conectado A La Red de Distribución en Baja Tensión 29-JunioSergio Franco de Santiago100% (1)
- Diseño de Generador SincronoDocument12 pagesDiseño de Generador SincronojimNo ratings yet
- Turbinas MareomotricesDocument30 pagesTurbinas MareomotricesRidel RamosNo ratings yet
- 8-Cálculo de Líneas Alimentadas Por Los Dos Extremos de Sección UniformeDocument14 pages8-Cálculo de Líneas Alimentadas Por Los Dos Extremos de Sección UniformeGonzalo ArtegoytiaNo ratings yet
- Curva de Capabilidad de Um Generador SincronoDocument7 pagesCurva de Capabilidad de Um Generador Sincronochrist9088100% (1)
- Proyecto Final CENSOLARDocument29 pagesProyecto Final CENSOLARAnibal RodriguezNo ratings yet
- Guía - de - Aprendizaje-SubestacionesDocument9 pagesGuía - de - Aprendizaje-SubestacionesLEYDER RODRIGUEZNo ratings yet
- Esquemas - Corriente ContinuaDocument22 pagesEsquemas - Corriente ContinuaMaria Aparecida BatistaNo ratings yet
- Modulo Taller Produccion y Distribucion ESNO BOQUETE - ListoDocument31 pagesModulo Taller Produccion y Distribucion ESNO BOQUETE - ListoAntonio PalmaNo ratings yet
- Presentación Turbinas KaplanDocument70 pagesPresentación Turbinas KaplanndmoraNo ratings yet
- Metodología para El Análisis de Transitorios Electromagnéticos de Maniobra en Sistemas de Alta t2Document105 pagesMetodología para El Análisis de Transitorios Electromagnéticos de Maniobra en Sistemas de Alta t2Jhon Edgar Quisiyupanqui CusiquispeNo ratings yet
- 1ra Clase O&m Ee PDFDocument135 pages1ra Clase O&m Ee PDFKelyn del CarmenNo ratings yet
- Generalidades de AerogeneradoresDocument17 pagesGeneralidades de AerogeneradoresJorgin I. BermúdezNo ratings yet
- MONOGRAFIA 9 - Motor Asíncrono Trifásico Tipo Rotor Jaula de ArdillaDocument25 pagesMONOGRAFIA 9 - Motor Asíncrono Trifásico Tipo Rotor Jaula de Ardillaharolt azañedoNo ratings yet
- Instalaciones Electricas en Media y Baja TensionDocument48 pagesInstalaciones Electricas en Media y Baja TensionCristhian Fernando Sanchez Robles100% (2)
- Principios Generales de Las Máquinas Eléctricas - PROBLEMASDocument23 pagesPrincipios Generales de Las Máquinas Eléctricas - PROBLEMASNabil El MansouriNo ratings yet
- Proteccion de Lineas de TransmisiónDocument4 pagesProteccion de Lineas de TransmisiónjulienszNo ratings yet
- Ensayo en Vacío Y CORTO TRIFASICODocument5 pagesEnsayo en Vacío Y CORTO TRIFASICOVictor Felipe Domínguez MaloNo ratings yet
- Energía EólicaDocument45 pagesEnergía EólicaYennifer AlcainoNo ratings yet
- Me Ac 2020Document123 pagesMe Ac 2020Juan Alfonso Romero Haro100% (2)
- Electrótecnia - Ramón M. Mujal Rosas PDFDocument312 pagesElectrótecnia - Ramón M. Mujal Rosas PDFcarvalle5No ratings yet
- Control Automatico Circuitos RLCDocument200 pagesControl Automatico Circuitos RLCKevin PachecoNo ratings yet
- Energía Solar PV - Cálculo de Una Instalación Aislada - Marcombo - IndiceDocument5 pagesEnergía Solar PV - Cálculo de Una Instalación Aislada - Marcombo - IndiceJeanPoncedeLeon0% (3)
- Tesina Cortocircuito PDFDocument110 pagesTesina Cortocircuito PDFJose LuisNo ratings yet
- Proyecto EléctricoDocument18 pagesProyecto EléctricoRicardo Ernesto Zapata Caro100% (1)
- Calculo de La Malla de Puesta A Tierra de Una SubestaciónDocument11 pagesCalculo de La Malla de Puesta A Tierra de Una SubestaciónJulioNo ratings yet
- TRB 03Document1 pageTRB 03Antony Salas0% (2)
- Control neuronal y difuso para sistemas fotovoltaicosFrom EverandControl neuronal y difuso para sistemas fotovoltaicosNo ratings yet
- Montaje y mantenimiento de redes eléctricas subterráneas de alta tensión.From EverandMontaje y mantenimiento de redes eléctricas subterráneas de alta tensión.No ratings yet
- Montaje de centros de transformación. ELEE0209From EverandMontaje de centros de transformación. ELEE0209No ratings yet
- Energía solar fotovoltaica: 3a ediciónFrom EverandEnergía solar fotovoltaica: 3a ediciónRating: 5 out of 5 stars5/5 (3)
- Normas Une Del Reglamento de Lineas Electricas de Alta Tension (R - AenorDocument1 pageNormas Une Del Reglamento de Lineas Electricas de Alta Tension (R - AenorLosuma 79No ratings yet
- Declaración de Veracidad en CastellanoDocument1 pageDeclaración de Veracidad en CastellanoLosuma 79No ratings yet
- Instrucciones para La Legalización de Documentos de Estudiantes ExtranjerosDocument2 pagesInstrucciones para La Legalización de Documentos de Estudiantes ExtranjerosLosuma 79No ratings yet
- Instrucciones Preinscripcin Mu 2223 290322Document5 pagesInstrucciones Preinscripcin Mu 2223 290322Losuma 79No ratings yet
- Humedad Absoluta, Especifica y RelativaDocument1 pageHumedad Absoluta, Especifica y RelativaLosuma 79No ratings yet
- Explicacin Proceso Ac - 280322Document1 pageExplicacin Proceso Ac - 280322Losuma 79No ratings yet
- Articulo Reduccion Dvs 2 PDFDocument8 pagesArticulo Reduccion Dvs 2 PDFAlejandro López GarzónNo ratings yet
- Central Hidroeléctrica Reversible - Wikipedia, La Enciclopedia LibreDocument3 pagesCentral Hidroeléctrica Reversible - Wikipedia, La Enciclopedia LibreMario EduardoNo ratings yet
- Bio Combustibles Solid OsDocument7 pagesBio Combustibles Solid OsKarla Stephany Fuentes HernandezNo ratings yet
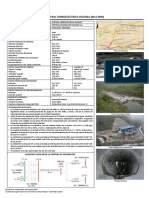
- Central Hidroeléctrica Huanza (90,6 MW) : Esquema Unifilar de La Central de GeneraciónDocument1 pageCentral Hidroeléctrica Huanza (90,6 MW) : Esquema Unifilar de La Central de GeneraciónRusbel ValdiviaNo ratings yet
- Trabajo de Investigacion-Energia Eolica 2Document43 pagesTrabajo de Investigacion-Energia Eolica 2Tomas Alberto Huamani Lizana100% (1)
- Batería 12V 33ah Ultracell UCG 33 12 AGM Ciclo ProfundoDocument1 pageBatería 12V 33ah Ultracell UCG 33 12 AGM Ciclo ProfundoMarcel BaqueNo ratings yet
- Termodinámica AngelDocument7 pagesTermodinámica Angeljeankeh perezNo ratings yet
- Tarea 1 Ramas de La FísicaDocument6 pagesTarea 1 Ramas de La FísicaNico MedinaNo ratings yet
- Recibo de Luz Dep 2 y 3Document2 pagesRecibo de Luz Dep 2 y 3Viridiana BarreraNo ratings yet
- Apuntes OBRAS Hidraulicas de SEGURIDADDocument13 pagesApuntes OBRAS Hidraulicas de SEGURIDADpablopelaNo ratings yet
- Reporte de Práctica de La Visita A La Subestación TerranovaDocument2 pagesReporte de Práctica de La Visita A La Subestación Terranovarafael salas munosNo ratings yet
- Guion 5 Media General y TécnicaDocument28 pagesGuion 5 Media General y Técnicacruzmsotillor100% (1)
- Preinforme Resistencia Interna de Una PilaDocument4 pagesPreinforme Resistencia Interna de Una PilaMaria Isabel Martinez NorenaNo ratings yet
- CNB Fisica Fundamental MagisterioDocument15 pagesCNB Fisica Fundamental Magisteriorichard diazNo ratings yet
- PDF Regulador de Tension y Carga de Bateria Trifasico para Moto - CompressDocument3 pagesPDF Regulador de Tension y Carga de Bateria Trifasico para Moto - Compressjosue vega castilloNo ratings yet
- Esop U1 A3Document3 pagesEsop U1 A3CesarNo ratings yet
- Lab #6 - Trabajo - EnergíaDocument4 pagesLab #6 - Trabajo - EnergíaMiguel Angel Gutierrez LopezNo ratings yet
- Plan de Mantenimiento de Una CalderaDocument31 pagesPlan de Mantenimiento de Una CalderaRonald Däviid WarNo ratings yet
- Partes Del Tablero DidácticoDocument7 pagesPartes Del Tablero DidácticoCarlos GuaracaNo ratings yet
- Turbo ExpansiónDocument19 pagesTurbo ExpansiónFlor Ayma GuzmánNo ratings yet
- CUESTIONARIODocument1 pageCUESTIONARIODeimianNo ratings yet
- GP 4Document37 pagesGP 4Heidi ParedesNo ratings yet
- La Importancia Del Secado de SemillasDocument4 pagesLa Importancia Del Secado de SemillasDinora MoralesNo ratings yet
- Planificación Anual de Ciencias Naturales 7Document4 pagesPlanificación Anual de Ciencias Naturales 7MarceNo ratings yet
- GRUA (Dos Ejes)Document4 pagesGRUA (Dos Ejes)hernanNo ratings yet
- Cursos de Malla Al 04.08.23 AAQDocument3 pagesCursos de Malla Al 04.08.23 AAQKaren Alvarado RiverosNo ratings yet
- Ecuaciones Diferenciales ProyectoDocument10 pagesEcuaciones Diferenciales ProyectoLaura PachecoNo ratings yet
- Lección 6 PDFDocument126 pagesLección 6 PDFJose Antonio Vargas GonzalezNo ratings yet
- Generadores de Vapor - CalderasDocument27 pagesGeneradores de Vapor - CalderasVandeverdNo ratings yet
- Calculo Corriente CortocircuitoDocument8 pagesCalculo Corriente CortocircuitoJULIO ALCIDES AGUIRRE0% (1)