You might also like
- NU3000 NU6000 Service ManualDocument35 pagesNU3000 NU6000 Service Manualoscarm311875% (16)
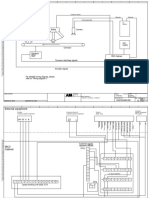
- Single Line Diagram of 5kw Rooftop SPV SystemDocument1 pageSingle Line Diagram of 5kw Rooftop SPV SystemArun Sasidharan100% (2)
- Power Supply Wiring For 120V Unit: Service Diagram, Combined Bassman 100T Power Amp PCB AssyDocument4 pagesPower Supply Wiring For 120V Unit: Service Diagram, Combined Bassman 100T Power Amp PCB AssymidexNo ratings yet
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- IFEM Ch07 PDFDocument19 pagesIFEM Ch07 PDFNitzOONo ratings yet
- Manual de Servicio CX 350B 84355067-Dmc Site OnlyDocument127 pagesManual de Servicio CX 350B 84355067-Dmc Site Onlyabel jairo santos cabello100% (2)
- QUBE-Servo MyRIO Quick Start GuideDocument4 pagesQUBE-Servo MyRIO Quick Start GuidealfredokpuNo ratings yet
- Q8-USB - Quick Start GuideDocument4 pagesQ8-USB - Quick Start GuidedhruvNo ratings yet
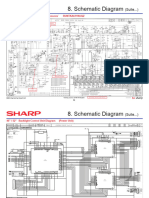
- Sharp Runtka611wjqz psd-0698 Psu SCHDocument2 pagesSharp Runtka611wjqz psd-0698 Psu SCHMarko VujinovićNo ratings yet
- Baseline DS-PDMC-EG2-WB MC Quick Start Guide V1.2.1 20200930Document1 pageBaseline DS-PDMC-EG2-WB MC Quick Start Guide V1.2.1 20200930LuisAlbertoSaldañaRmzNo ratings yet
- Unidirectional Opening Sensor For Automatic Sliding Doors: DescriptionDocument2 pagesUnidirectional Opening Sensor For Automatic Sliding Doors: DescriptionMilutin JankovicNo ratings yet
- Operation Manual: Fieldbus DeviceDocument1 pageOperation Manual: Fieldbus DeviceRodrigo CostaNo ratings yet
- 30 Urban CruiserDocument1 page30 Urban CruiserHEMIL ROBERTO RODRIGUEZ HERRERANo ratings yet
- PC Based Oscilloscope Using ArduinoDocument2 pagesPC Based Oscilloscope Using ArduinoFernando EstupinianNo ratings yet
- 《Mctc Ard C系列电梯应急救援装置用户手册》 英文19010431 b00Document2 pages《Mctc Ard C系列电梯应急救援装置用户手册》 英文19010431 b00kolwin .chindwinNo ratings yet
- SCADA Network ArchitectureDocument1 pageSCADA Network ArchitectureSlick72No ratings yet
- Spare Items BOM - Per SSDocument1 pageSpare Items BOM - Per SSTarek KhafagaNo ratings yet
- 751001D4D2C4D81A6F1Document1 page751001D4D2C4D81A6F1jppreciadomNo ratings yet
- Service Manual: Model: DPT-2500NDocument17 pagesService Manual: Model: DPT-2500Njose_gomez_30No ratings yet
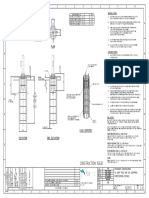
- Construction Issue: General NotesDocument1 pageConstruction Issue: General NotesShokry AlkissyNo ratings yet
- OLV1 (Short-Circuit Analysis) - 3PHDocument1 pageOLV1 (Short-Circuit Analysis) - 3PHSubhadeep DeyNo ratings yet
- RM-74 RM-75 Schematics V2 0Document8 pagesRM-74 RM-75 Schematics V2 0Владимир КлюевNo ratings yet
- LCD InfDocument1 pageLCD Infkottee1977100% (2)
- Sirona C2+ Dental Unit Quick User ManualDocument2 pagesSirona C2+ Dental Unit Quick User ManualRoberto FalconeNo ratings yet
- AR-M160 - M205 Circuit PDFDocument20 pagesAR-M160 - M205 Circuit PDFLân SharpNo ratings yet
- Q64AD GH UserManual Hardware IB 0800223 BDocument1 pageQ64AD GH UserManual Hardware IB 0800223 BSebastián LozadaNo ratings yet
- Q17017 0100D PK4b (Ii) A TD GN MI 852 1OF1 REV00Document1 pageQ17017 0100D PK4b (Ii) A TD GN MI 852 1OF1 REV00Elektrikal InhinyeroNo ratings yet
- Samsung 793Document14 pagesSamsung 793api-26283766No ratings yet
- QB400Document2 pagesQB400Éverton KafskiNo ratings yet
- Simbología de Instrumentación SENATIDocument1 pageSimbología de Instrumentación SENATINavarro Zavala AntonyNo ratings yet
- Final Network DesignDocument1 pageFinal Network DesignAdam ThursbyNo ratings yet
- KT-502H en Tcd210202ab 20211221 Inst WDocument1 pageKT-502H en Tcd210202ab 20211221 Inst WGopal HegdeNo ratings yet
- Cat Dcs Sis Controller PDFDocument2 pagesCat Dcs Sis Controller PDFJulito CastellanosNo ratings yet
- Cat Dcs Sis Controller PDFDocument2 pagesCat Dcs Sis Controller PDFJulito CastellanosNo ratings yet
- Power Layout Plan Lighting Layout Plan: Proposed Interior Renovation Ms. Camille & Aimie CabatoDocument1 pagePower Layout Plan Lighting Layout Plan: Proposed Interior Renovation Ms. Camille & Aimie CabatofaithNo ratings yet
- In Out SEL 787Document1 pageIn Out SEL 787Tosikur RahmanNo ratings yet
- Buka Engine Control Xenia VvtiDocument1 pageBuka Engine Control Xenia VvtiMuhtadinNo ratings yet
- Datwiler Manual 2008 v3 enDocument57 pagesDatwiler Manual 2008 v3 enhjduarteNo ratings yet
- AVRkit4u CISDocument1 pageAVRkit4u CISDat DaoNgocNo ratings yet
- Applied Voltage Test System For TransformersDocument3 pagesApplied Voltage Test System For Transformerschaima haddoudiNo ratings yet
- HandModule - A3Document2 pagesHandModule - A3Toàn LeNo ratings yet
- Electrical Room: 2041.44 kVA 1219.938 kVA Rated Load Peak Load 2455.471 A 1467.357 ADocument3 pagesElectrical Room: 2041.44 kVA 1219.938 kVA Rated Load Peak Load 2455.471 A 1467.357 ARodrigo Pedraza GalazNo ratings yet
- Main Items BOQ Per SS: 4. Ethernet Switch 1. Control Panel & Panel Accessories 2. RTU System 5. Maintenance ToolsDocument1 pageMain Items BOQ Per SS: 4. Ethernet Switch 1. Control Panel & Panel Accessories 2. RTU System 5. Maintenance ToolsTarek KhafagaNo ratings yet
- Copper TopologyDocument1 pageCopper TopologyinbNo ratings yet
- Accessories: Load Protection Motor Starter ProtectionDocument1 pageAccessories: Load Protection Motor Starter ProtectionCalixto Milla EsauNo ratings yet
- 机型:KDL42XS715UN: Konka Dtv Sch DesignDocument14 pages机型:KDL42XS715UN: Konka Dtv Sch DesignAlexis FloresNo ratings yet
- 6 1enDocument2 pages6 1enarabNo ratings yet
- Pvi Usb RS232 - 485Document2 pagesPvi Usb RS232 - 485Lucas CostaNo ratings yet
- MS-AJ1 MS-AJ2: Universal Sensor Mounting StandDocument2 pagesMS-AJ1 MS-AJ2: Universal Sensor Mounting StandAjay MayalNo ratings yet
- Buka Buka Engine ControlDocument1 pageBuka Buka Engine Controltutorial otomotifNo ratings yet
- Plts Chemco Karawang 3.2 MWP: LegendDocument3 pagesPlts Chemco Karawang 3.2 MWP: LegendmuliamakmurNo ratings yet
- Robocup 2023 - RCT - Electrical PresentationDocument4 pagesRobocup 2023 - RCT - Electrical PresentationRevidadina Dwi JunitaNo ratings yet
- Quickstart Iolg2ei 03208r01 de en FR PT It Es ZH Ja Im0059857Document2 pagesQuickstart Iolg2ei 03208r01 de en FR PT It Es ZH Ja Im0059857Felippe OrtzNo ratings yet
- 125 MVA - VBIE - 672748 - 033 OD - Outline DrawingsDocument1 page125 MVA - VBIE - 672748 - 033 OD - Outline DrawingsNaeem TurkanNo ratings yet
- Schema ReceptorDocument1 pageSchema ReceptorDaniel TaradaciucNo ratings yet
- Sm-t377v SVC ManualDocument11 pagesSm-t377v SVC Manualasish dalalNo ratings yet
- A0110 - Construction PlansDocument1 pageA0110 - Construction PlansMuhammad AbuBakarNo ratings yet
- EJEMPLO 3HAC024480-008 - Rev02Document10 pagesEJEMPLO 3HAC024480-008 - Rev02ipmcmtyNo ratings yet
- Specifications 注意事項: Safety WiringDocument2 pagesSpecifications 注意事項: Safety WiringMalik MayNo ratings yet
- HCD-ECL77BT - ECL99BT DiagramaDocument14 pagesHCD-ECL77BT - ECL99BT DiagramaAmin Santana100% (1)
- ATV71 and ATV32 On EthernetIP - Assemblies 20-70 - M340 NOC0401 On Unity V6.0Document24 pagesATV71 and ATV32 On EthernetIP - Assemblies 20-70 - M340 NOC0401 On Unity V6.0Anonymous hhgx5W2eNo ratings yet
- MapleSim Control Design Getting Started GuideDocument8 pagesMapleSim Control Design Getting Started GuideRodolfo Viera ZapataNo ratings yet
- Gear Te Q ManualDocument149 pagesGear Te Q ManualjccforeverNo ratings yet
- YourGearInterface 2014 PDFDocument6 pagesYourGearInterface 2014 PDFalfredokpuNo ratings yet
- MapleSim Control Design Getting Started GuideDocument8 pagesMapleSim Control Design Getting Started GuideRodolfo Viera ZapataNo ratings yet
- Crouzet Virtual Display TutorialDocument8 pagesCrouzet Virtual Display TutorialalfredokpuNo ratings yet
- Controlled Computations or Computer Control?: John BarasDocument2 pagesControlled Computations or Computer Control?: John BarasalfredokpuNo ratings yet
- Issues: Sensor Technologies and Microsensor For Mechatronics SystemsDocument11 pagesIssues: Sensor Technologies and Microsensor For Mechatronics SystemsalfredokpuNo ratings yet
- Sistemas de Control Lineal Con Hojas de ClaculoDocument7 pagesSistemas de Control Lineal Con Hojas de ClaculoalfredokpuNo ratings yet
- QUBE-Servo Direct IO Quick Start GuideDocument4 pagesQUBE-Servo Direct IO Quick Start GuidealfredokpuNo ratings yet
- QUBE-Servo Direct IO Quick Start GuideDocument6 pagesQUBE-Servo Direct IO Quick Start GuidealfredokpuNo ratings yet
- Assembly Automation: Emerald Article: Direct Input and Output System: Another Secret Underlying Fanuc's Unmanned FactoryDocument6 pagesAssembly Automation: Emerald Article: Direct Input and Output System: Another Secret Underlying Fanuc's Unmanned Factoryalfredokpu100% (1)
- Controlled Computations or Computer Control?: John BarasDocument2 pagesControlled Computations or Computer Control?: John BarasalfredokpuNo ratings yet
- Agilent DDRobotDocument4 pagesAgilent DDRobotalfredokpuNo ratings yet
- Catalogo de Sensores de AnguloDocument36 pagesCatalogo de Sensores de AnguloalfredokpuNo ratings yet
- 597708Document90 pages597708labaasjuhhNo ratings yet
- Dynamixel: User's Manual 2006-06-14Document38 pagesDynamixel: User's Manual 2006-06-14Martin Smith0% (1)
- Generator DDDocument2 pagesGenerator DDalfredokpuNo ratings yet
- Catalogo de Sensores de Angulo PDFDocument52 pagesCatalogo de Sensores de Angulo PDFalfredokpuNo ratings yet
- Direct Drive Solutions: Industrial For PapermakingDocument8 pagesDirect Drive Solutions: Industrial For PapermakingalfredokpuNo ratings yet
- CMUcam2 ManualDocument68 pagesCMUcam2 Manualialeon1No ratings yet
- Aplicacion 1Document8 pagesAplicacion 1alfredokpuNo ratings yet
- Abb DD6Document4 pagesAbb DD6alfredokpuNo ratings yet
- High Resolution Sine Encoder Systems en-USDocument4 pagesHigh Resolution Sine Encoder Systems en-USalfredokpuNo ratings yet
- MapleSim FMI Connector Getting Started GuideDocument17 pagesMapleSim FMI Connector Getting Started GuidealfredokpuNo ratings yet
- CMUcam3 SDK GuideDocument22 pagesCMUcam3 SDK GuidealfredokpuNo ratings yet
- Two Inverted PendulumDocument16 pagesTwo Inverted PendulumalfredokpuNo ratings yet
- Retail Analysis WalmartDocument18 pagesRetail Analysis WalmartNavin MathadNo ratings yet
- Sidereal TimeDocument6 pagesSidereal TimeBruno LagetNo ratings yet
- Flow Diagram: Equipment Identification Numbering SystemDocument24 pagesFlow Diagram: Equipment Identification Numbering Systemmkpq100% (1)
- Oakwood, Ub CityDocument18 pagesOakwood, Ub CityAfreen BandayNo ratings yet
- Tga Kinetic ValueseDocument3 pagesTga Kinetic ValueseCarlos ChavezNo ratings yet
- Astm D448Document3 pagesAstm D448Mutyaba Johnson100% (5)
- Confidence Limits in StatisticsDocument30 pagesConfidence Limits in StatisticsaassmmrrNo ratings yet
- Dürer's Rhinoceros Springer Esteban JMDocument29 pagesDürer's Rhinoceros Springer Esteban JMmiguelestebanNo ratings yet
- Associate Cloud Engineer - Study NotesDocument14 pagesAssociate Cloud Engineer - Study Notesabhi16101No ratings yet
- Waqas Ahmed C.VDocument2 pagesWaqas Ahmed C.VWAQAS AHMEDNo ratings yet
- Daily Lesson Log: Department of EducationDocument10 pagesDaily Lesson Log: Department of EducationStevenson Libranda BarrettoNo ratings yet
- Conceptualizing Teacher Professional LearningDocument33 pagesConceptualizing Teacher Professional LearningPaula Reis Kasmirski100% (1)
- Transcript Biu2032Document5 pagesTranscript Biu2032Kuna KunavathiNo ratings yet
- Unity FlowchartDocument1 pageUnity Flowchartcippolippo123No ratings yet
- فص یروئت Queuining TheoryDocument47 pagesفص یروئت Queuining Theorycampal123No ratings yet
- CT Analyzer Whats New V4 52 ENUDocument6 pagesCT Analyzer Whats New V4 52 ENUSivakumar NatarajanNo ratings yet
- Solution StochiometryDocument23 pagesSolution StochiometryAnthony AbesadoNo ratings yet
- A Sourcebook in Chinese LongevityDocument34 pagesA Sourcebook in Chinese Longevitytanpausing67% (3)
- UPSC Paper 4 Binder PDFDocument17 pagesUPSC Paper 4 Binder PDFHsis AbedNo ratings yet
- DonnetDocument12 pagesDonnetAsia SzmyłaNo ratings yet
- Master SC 2015 enDocument72 pagesMaster SC 2015 enNivas Kumar SureshNo ratings yet
- How To Install Windows Drivers With Software Applications: August 1, 2006Document12 pagesHow To Install Windows Drivers With Software Applications: August 1, 2006Mohamad Lutfi IsmailNo ratings yet
- Computer Graphics BasicsDocument3 pagesComputer Graphics BasicsBharath RNo ratings yet
- Emergency Stop in PL E: SINUMERIK Safety IntegratedDocument10 pagesEmergency Stop in PL E: SINUMERIK Safety IntegratedVladimirAgeevNo ratings yet
- ExtPascal Advanced Configuration Complete Eng v4Document31 pagesExtPascal Advanced Configuration Complete Eng v4jofreezeNo ratings yet
- Evidence DoctrinesDocument5 pagesEvidence DoctrinesChezca MargretNo ratings yet
- Warping Constant of Open Sections With Arbitrary Profile Geometry Rev 1 2011Document24 pagesWarping Constant of Open Sections With Arbitrary Profile Geometry Rev 1 2011hoojzteNo ratings yet
- Criminal Behavior and Learning TheoryDocument8 pagesCriminal Behavior and Learning TheoryRobert BataraNo ratings yet