You might also like
- A Scalable Dual-Clock FIFO For Data Transfers Between Arbitrary and Haltable Clock DomainsDocument10 pagesA Scalable Dual-Clock FIFO For Data Transfers Between Arbitrary and Haltable Clock DomainsRajeev KamalNo ratings yet
- Microelectronics Journal: Seyed Mohamad Taghi Adl, Siamak MohammadiDocument12 pagesMicroelectronics Journal: Seyed Mohamad Taghi Adl, Siamak MohammadiBui Van ThanhNo ratings yet
- Clocked and Asynchronous FIFO Characterization and ComparisonDocument7 pagesClocked and Asynchronous FIFO Characterization and Comparisonakash singhNo ratings yet
- Design, ASIC Implementation and Verification of Synchronous and Asynchronous FIFODocument6 pagesDesign, ASIC Implementation and Verification of Synchronous and Asynchronous FIFOshashikalaNo ratings yet
- PROJECT ON SYNCHRONOUS FIFO DESIGN, SIMULATION, VERIFICATION and SYNTHESIS Using VERILOGDocument47 pagesPROJECT ON SYNCHRONOUS FIFO DESIGN, SIMULATION, VERIFICATION and SYNTHESIS Using VERILOGasimanand100% (15)
- Implementation of Fifo Memory in Verilog: Nabeel Ahmad M. Tech. (1 Sem) Microelectronics and VLSI DesignDocument11 pagesImplementation of Fifo Memory in Verilog: Nabeel Ahmad M. Tech. (1 Sem) Microelectronics and VLSI DesignNabeel AhmadNo ratings yet
- ChiragDocument33 pagesChiragigMonster GamingNo ratings yet
- FifoDocument4 pagesFifoVasanth Kumar M H0% (1)
- 09 Fifo SynchronizationDocument4 pages09 Fifo SynchronizationkoorapatisagarNo ratings yet
- Research Article: Multimode Flex-Interleaver Core For Baseband Processor PlatformDocument16 pagesResearch Article: Multimode Flex-Interleaver Core For Baseband Processor PlatformErick PeñafielNo ratings yet
- FIFO Is An: Acronym Queue First-Come, First-ServedDocument3 pagesFIFO Is An: Acronym Queue First-Come, First-Servedvivekanand_bonalNo ratings yet
- Base Paper 1Document6 pagesBase Paper 16055 - Ragul TNo ratings yet
- Implementation of A Multi-Channel UART Controller Based On FIFO Technique and FPGADocument5 pagesImplementation of A Multi-Channel UART Controller Based On FIFO Technique and FPGAJNRNo ratings yet
- 8 Design of BISTDocument54 pages8 Design of BISTvsangvai26No ratings yet
- Implementation of Asynchronous Fifo Using VHDLDocument36 pagesImplementation of Asynchronous Fifo Using VHDLkalscribNo ratings yet
- InfiniBand An OverviewDocument9 pagesInfiniBand An Overviewio8No ratings yet
- A Wrapper of PCI Express With FIFO Interfaces Based On FPGA - Hu Li - Yuan'an Liu - Dongming Yuan - Hefei HuDocument5 pagesA Wrapper of PCI Express With FIFO Interfaces Based On FPGA - Hu Li - Yuan'an Liu - Dongming Yuan - Hefei HuTechnical NoviceNo ratings yet
- Main PJCTDocument13 pagesMain PJCTkusumaannieNo ratings yet
- Understanding Synchronous Fifos: Author: Cypress Associated Part FamilyDocument10 pagesUnderstanding Synchronous Fifos: Author: Cypress Associated Part FamilySainadh YerrapragadaNo ratings yet
- Design of An Efficient AXI-4 Protocol For High Speed SOC Applications On FPGA PlatformDocument8 pagesDesign of An Efficient AXI-4 Protocol For High Speed SOC Applications On FPGA PlatformSubbuNaiduNo ratings yet
- 7 PBDocument8 pages7 PBPV sushmithaNo ratings yet
- Fifo DesignDocument43 pagesFifo Designbviswanath84No ratings yet
- Base Paper 2Document7 pagesBase Paper 26055 - Ragul TNo ratings yet
- Noc Topologies01Document16 pagesNoc Topologies01Alex HillNo ratings yet
- RFC 2544 Performance Evaluation and Internal MeasuDocument8 pagesRFC 2544 Performance Evaluation and Internal MeasughateankiNo ratings yet
- Single Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGADocument4 pagesSingle Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGAInternational Organization of Scientific Research (IOSR)No ratings yet
- Non Invasive Time Synchronization For Zigbee Wireless Sensor NetworksDocument6 pagesNon Invasive Time Synchronization For Zigbee Wireless Sensor NetworksKatrina Banawa PatupatNo ratings yet
- Implementation Methodology of High Performance Multi Byte Data Access Control of AMBA BusDocument5 pagesImplementation Methodology of High Performance Multi Byte Data Access Control of AMBA BusKumar Goud.KNo ratings yet
- Mllcrolplpellnes: Ivan E. SutherlandDocument19 pagesMllcrolplpellnes: Ivan E. SutherlandKonstantin SelyuninNo ratings yet
- Design of An Efficient FIFO Buffer For Network On Chip RoutersDocument4 pagesDesign of An Efficient FIFO Buffer For Network On Chip RoutersAmityUniversity IIcNo ratings yet
- Algorithms: Iob-Cache: A High-Performance Configurable Open-Source CacheDocument20 pagesAlgorithms: Iob-Cache: A High-Performance Configurable Open-Source CacheJavariaNo ratings yet
- Neural Network Implementation in Hardware Using FPGAsDocument8 pagesNeural Network Implementation in Hardware Using FPGAsbenNo ratings yet
- Power and Energy Implications of The Number of Threads Used On The Intel Xeon PhiDocument11 pagesPower and Energy Implications of The Number of Threads Used On The Intel Xeon Phiomar.pro.servicesNo ratings yet
- Implementation of Channel Demodulator For Dab System: Huz Yunlin of & Yunlin &Document4 pagesImplementation of Channel Demodulator For Dab System: Huz Yunlin of & Yunlin &ashu_4novNo ratings yet
- Irjet V4i6796 PDFDocument4 pagesIrjet V4i6796 PDFsarthNo ratings yet
- Closed-Form Expressions For ICI/ISI in Filtered OFDM Systems For Asynchronous 5G UplinkDocument13 pagesClosed-Form Expressions For ICI/ISI in Filtered OFDM Systems For Asynchronous 5G UplinkAnonymous 8wKhfIZLNo ratings yet
- Low-Power and Area-Efficient Carry Select AdderDocument5 pagesLow-Power and Area-Efficient Carry Select AdderSolleti Suresh4No ratings yet
- Kurd Et Al 2015 HaswellDocument10 pagesKurd Et Al 2015 Haswell马晓飞No ratings yet
- Pentium Pro Processor: Id:391002451 Students Name:Reema Muawad AlatawiDocument9 pagesPentium Pro Processor: Id:391002451 Students Name:Reema Muawad AlatawiبندريNo ratings yet
- Chap27 And20cs2 Illiaciv cs1Document25 pagesChap27 And20cs2 Illiaciv cs1việt lê quốcNo ratings yet
- 10 1 1 429 569 PDFDocument5 pages10 1 1 429 569 PDFpraveenNo ratings yet
- Simulation and Synthesis Techniques For Asynchronous FIFO DesignDocument24 pagesSimulation and Synthesis Techniques For Asynchronous FIFO DesignKavyashreeMNo ratings yet
- The Cost of Application-Class Processing: Energy and Performance Analysis of A Linux-Ready 1.7-Ghz 64-Bit Risc-V Core in 22-Nm Fdsoi TechnologyDocument12 pagesThe Cost of Application-Class Processing: Energy and Performance Analysis of A Linux-Ready 1.7-Ghz 64-Bit Risc-V Core in 22-Nm Fdsoi TechnologyxrovljolscjvmiszchNo ratings yet
- A Cost-Effective and Scalable Merge Sorter Tree On FPGAsDocument10 pagesA Cost-Effective and Scalable Merge Sorter Tree On FPGAswedevok392No ratings yet
- A Pausible Bisynchronous FIFO For GALS Systems: Ben Keller, Matthew Fojtik, and Brucek KhailanyDocument8 pagesA Pausible Bisynchronous FIFO For GALS Systems: Ben Keller, Matthew Fojtik, and Brucek KhailanykoorapatisagarNo ratings yet
- Design, Verification AND Synthesis OF Synchronous FifoDocument43 pagesDesign, Verification AND Synthesis OF Synchronous FifoMohit GuptaNo ratings yet
- VHDL TutorialDocument127 pagesVHDL TutorialDeepanker KumeriaNo ratings yet
- Never Design Another FIFODocument2 pagesNever Design Another FIFOvikas310No ratings yet
- Technology Overview: Why Fibre Channel Over Ethernet?: Storage Area NetworkDocument10 pagesTechnology Overview: Why Fibre Channel Over Ethernet?: Storage Area NetworkalisonkoodNo ratings yet
- Intel® Omni-Path Architecture: Enabling Scalable, High Performance FabricsDocument9 pagesIntel® Omni-Path Architecture: Enabling Scalable, High Performance Fabricssmithm007100% (1)
- FICON - Well Isn't That Special 2018Document2 pagesFICON - Well Isn't That Special 2018tiagosazevedoNo ratings yet
- Survey FPGA IEEE AccessDocument13 pagesSurvey FPGA IEEE AccessSaurabh BhangaleNo ratings yet
- Integrating Unicast and Multicast Traffic Scheduling in A Combined Input-And Output-Queued Packet-Switching SystemDocument9 pagesIntegrating Unicast and Multicast Traffic Scheduling in A Combined Input-And Output-Queued Packet-Switching Systemnguyentienduy1512No ratings yet
- 3.2 Rtlinux Inter-Process Communication (Ipc)Document8 pages3.2 Rtlinux Inter-Process Communication (Ipc)ravirajsjoshiNo ratings yet
- Kumm 2013Document8 pagesKumm 2013KRISHNARAJ RNo ratings yet
- Versatile Routing and Services with BGP: Understanding and Implementing BGP in SR-OSFrom EverandVersatile Routing and Services with BGP: Understanding and Implementing BGP in SR-OSNo ratings yet
- Mukesh TicketDocument2 pagesMukesh TicketRajeev KamalNo ratings yet
- CCH LecuresF07 Semiconductor AnimationDocument22 pagesCCH LecuresF07 Semiconductor AnimationRajeev KamalNo ratings yet
- CXL IntroductionDocument11 pagesCXL IntroductionRajeev KamalNo ratings yet
- Certificate - 2023-01-02T141225.648Document1 pageCertificate - 2023-01-02T141225.648Rajeev KamalNo ratings yet
- A Multi-Synchronous Bi-Directional Noc (Mbinoc) Architecture With Dynamic Self-Reconfigurable Channel For The Gals InfrastructureDocument16 pagesA Multi-Synchronous Bi-Directional Noc (Mbinoc) Architecture With Dynamic Self-Reconfigurable Channel For The Gals InfrastructureRajeev KamalNo ratings yet
- Chenming Hu Ch3Document30 pagesChenming Hu Ch3Green HeartNo ratings yet
- Amaresh PH.D Progress ReportDocument9 pagesAmaresh PH.D Progress ReportRajeev KamalNo ratings yet
- Design Methodology: Synchronous Sequential CircuitsDocument7 pagesDesign Methodology: Synchronous Sequential CircuitsRajeev KamalNo ratings yet
- Richard Sutton PDFDocument36 pagesRichard Sutton PDFRajeev KamalNo ratings yet
- Building A Culture of Research Recommended Practices PDFDocument33 pagesBuilding A Culture of Research Recommended Practices PDFRajeev KamalNo ratings yet
- ASICs by M J SmithDocument1,179 pagesASICs by M J Smithsundeep_15291000100% (10)
- 1378 - JU - Employment Application Form TeachingDocument4 pages1378 - JU - Employment Application Form TeachingRajeev KamalNo ratings yet
- Methodology For Effective Hierarchical Verification of Low Power DesignsDocument14 pagesMethodology For Effective Hierarchical Verification of Low Power DesignsRajeev KamalNo ratings yet
- Virtex5 Virtex6 XPE 14 3Document6 pagesVirtex5 Virtex6 XPE 14 3Rajeev KamalNo ratings yet
- Survey of Network On Chip (Noc) Architectures & ContributionsDocument15 pagesSurvey of Network On Chip (Noc) Architectures & ContributionsharivarahiNo ratings yet
- 591 CamReadyDocument6 pages591 CamReadyRajeev KamalNo ratings yet
- BilinkDocument13 pagesBilinkRajeev KamalNo ratings yet
- A Survey of Research and Practices of Network-on-Chip PDFDocument51 pagesA Survey of Research and Practices of Network-on-Chip PDFRajeev KamalNo ratings yet
- Elastistore: Flexible Elastic Buffering For Virtual-Channel-Based Networks On ChipDocument14 pagesElastistore: Flexible Elastic Buffering For Virtual-Channel-Based Networks On ChipRajeev KamalNo ratings yet
- 1Document7 pages1Rajeev KamalNo ratings yet
- Physical Implementation of The DSPI Etwork-On-Chip in The FAUST ArchitectureDocument10 pagesPhysical Implementation of The DSPI Etwork-On-Chip in The FAUST ArchitectureRajeev KamalNo ratings yet
- ADAPTIVE XY Mesh RoutingDocument4 pagesADAPTIVE XY Mesh RoutingRajeev KamalNo ratings yet
- IPC-HDBW3441E-S Datasheet 20210329Document3 pagesIPC-HDBW3441E-S Datasheet 20210329Karol LapinskiNo ratings yet
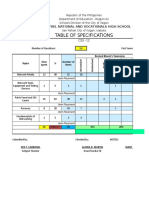
- Table of Specifications: San Rafael National and Vocationala High SchoolDocument2 pagesTable of Specifications: San Rafael National and Vocationala High SchoolJessieann Balmaceda CabanganNo ratings yet
- Audio and Video ConnectorDocument18 pagesAudio and Video ConnectorMohd AwanNo ratings yet
- AIX - From New User To Technical ExpertDocument372 pagesAIX - From New User To Technical ExpertJuan Carlos Perez AminNo ratings yet
- Technical Specifications of Network Camera & NVRDocument3 pagesTechnical Specifications of Network Camera & NVRmohmmad thapetNo ratings yet
- Protection Profile For Application SoftwareDocument74 pagesProtection Profile For Application SoftwareOmar AyoubNo ratings yet
- PaloAltoNetworks Pcnsa v2022!05!30 q68Document25 pagesPaloAltoNetworks Pcnsa v2022!05!30 q68Mecachis PiachisNo ratings yet
- MCR3512 Datasheet enDocument1 pageMCR3512 Datasheet enAhmed SharifNo ratings yet
- 310-302 Latest Test KingDocument96 pages310-302 Latest Test KingFarrukh HanifNo ratings yet
- How To Generate Sophos UTM Logs of Different Module For Sohpos IViewDocument76 pagesHow To Generate Sophos UTM Logs of Different Module For Sohpos IViewCP KrunalNo ratings yet
- Esp32 Et MQTTDocument7 pagesEsp32 Et MQTTLlouis PhysicsNo ratings yet
- CN Question Bank Module 1 2Document2 pagesCN Question Bank Module 1 2Sushmitha ChikkamaduNo ratings yet
- VSCC Setup GuideDocument26 pagesVSCC Setup GuideJasmine TsoNo ratings yet
- Chapter: 1.5 Net Etiquette Topic: 1.5.1 Net Etiquette: E-Content of Internet Technology and Web DesignDocument2 pagesChapter: 1.5 Net Etiquette Topic: 1.5.1 Net Etiquette: E-Content of Internet Technology and Web DesignETL LABSNo ratings yet
- 23 ACI T-Shoot Commands - LEARN WORK ITDocument7 pages23 ACI T-Shoot Commands - LEARN WORK ITravi kantNo ratings yet
- Sales DimensionsDocument133 pagesSales DimensionsRishabh KumarNo ratings yet
- User Guide English PowCom 4Document34 pagesUser Guide English PowCom 4Chau TriNo ratings yet
- Create FolderDocument4 pagesCreate FolderRaj GadgeNo ratings yet
- SIM7500 SIM7600 Series at Command Manual V2.00Document460 pagesSIM7500 SIM7600 Series at Command Manual V2.00Elek TesztNo ratings yet
- Patch Cord Cat 6a y 6a Blindado 28awg 1.5mts LSZH Leviton AzulDocument2 pagesPatch Cord Cat 6a y 6a Blindado 28awg 1.5mts LSZH Leviton AzulDavid MolinaNo ratings yet
- Install and Configure Snort IDS On Windows 7Document11 pagesInstall and Configure Snort IDS On Windows 7Er Ankur SaxenaNo ratings yet
- Nport NP 301 - 3onedataDocument24 pagesNport NP 301 - 3onedataNguyễn Tuấn ViệtNo ratings yet
- 1.2 Maxl Script Alter Database Appname - Dbname Compact OutlineDocument3 pages1.2 Maxl Script Alter Database Appname - Dbname Compact OutlineSucharit NarangNo ratings yet
- Full Stack Django and ReactDocument1 pageFull Stack Django and ReactMario ReileyNo ratings yet
- HP ProBook 640 G1 NotebookDocument61 pagesHP ProBook 640 G1 Notebooks_vallespinNo ratings yet
- Priya YadavDocument10 pagesPriya YadavrdgreatNo ratings yet
- Which Statements Correctly Identify The Role of Intermediary Devices in The NetworkDocument2 pagesWhich Statements Correctly Identify The Role of Intermediary Devices in The Networkgoofy12345No ratings yet
- User Manual: DSL-2875ALDocument103 pagesUser Manual: DSL-2875ALramonmartinezcatalaNo ratings yet
- Cell Name TCH Traffic (Erlang) SDCCH Drop (%) TCH Drop (%)Document82 pagesCell Name TCH Traffic (Erlang) SDCCH Drop (%) TCH Drop (%)Anchal KulshreshthaNo ratings yet