Professional Documents
Culture Documents
Berti - Buckling of Steel Tunnel Liner Under External Preassure
Uploaded by
mmendi84Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Berti - Buckling of Steel Tunnel Liner Under External Preassure
Uploaded by
mmendi84Copyright:
Available Formats
TECHNICAL FORUM
BUCKLING OF STEEL TUNNEL LINER UNDER
EXTERNAL PRESSURE
This paper presents a comprehensive design methodology for steel tunnel
liner subjected to external pressure. The writers condensed the substantial
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
body of literature on this topic into a generalized, coherent design approach.
Rather than reiterating complex derivations for the various buckling theories
that have historically been applied to steel tunnel liners, emphasis is given
to the assumptions that lie behind the theories. Given this background, the
theoretical and empirical appropriateness of various buckling theories is ex-
amined, and a step-by-step design procedure is outlined. The paper includes
fully worked design examples.
Introduction
There are a number of applications in which steel remains the material of
choice for cOQveyance or storage of liquids, particularly liquids under internal
pressure. Steel is often used as a liner in pressure tunnels and penstocks for
hydroelectric plants, water conveyance, and sewage conveyance. Steel liner
is also often used in pipe jacking operations beneath major facilities, and for
the conveyance of gases under pressure (e.g., natural gas).
Of the common structural materials, only steel is considered impervious
and leakproof for liquids and gases under external and internal pressure.
Reinforced concrete is not considered impervious, although it can be made
relatively impervious for low head water systems. High-pressure systems us-
ing concrete [such as Reinforced Concrete Cylinder Pipe (RCCP) and Pre-
stressed Concrete Cylinder Pipe (PCCP)] usually have a thin (1.5 mm) steel
cylinder that makes the pipe impervious. Over the last 30 years, PCCP, which
is wrapped and stressed by high-strength, but brittle, steel strands, has sup-
planted steel pressure pipe in many applications. However, due to a number
of recent failures of PCCP resulting from the stress corrosion of the strands,
many agencies are rethinking their options and considering the use of steel.
Plastic pipe shows promise in some applications, but its long-term use is
unproven by case histories, and may be limited by its relatively low modulus
of elasticity and creep problems.
Structural steel with low to medium strength (yield strength ranging from
200 to 400 MPa) has many advantages for pressure piping systems. Steel is
isotropic, has a high modulus of elasticity and strength, creeps negligibly, is
ductile, and can be made impervious by continuous welding or the use of
gasketed joints. Steel pipes are capable of resisting high internal pressures.
This is particularly true for tunnels in competent rock, where interaction (load
sharing) with the rock may be used to reduce the thickness of steel (or the
stress in the pipe). For large-diameter (greater than 5 m) pressure tunnels that
require an impervious liner, steel is almost always used due to the difficulties
in installing other types of liner, such as very thick and heavy concrete pipe
or composite systems with cast-in-place concrete. Of course, the potential for
corrosion must be investigated when steel is used.
In many cases where a steel liner is used to resist internal pressure by
membrane action, a loading condition assuming net external pressure must
also be considered. This condition occurs most often in pressure tunnels that
are quickly unwatered for inspection, for maintenance, or due to leakage
problems. Net external pressure can also exist when a low-pressure tunnel
passes through an area that has a high ground-water table. In such conditions
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/55
J. Energy Eng. 1998.124:55-89.
the net external pressure causes compression in the steel, and elastic stability
(buckling) is often the critical failure mode.
For conduits buried in the ground and subject to buckling due to external
pressure (from water and/or ground loads), variations of multilobe buckling
equations are used for analysis. In the case of a circular liner installed in a
rock tunnel, the concrete backfill confines the steel liner and suppresses the
onset of buckling. For a recent design of a water supply tunnel in Los An-
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
geles, the writers formalized an analysis and design procedure for a 3.66-m-
diameter steel-lined tunnel acted on by varying external ground-water heads.
During this process the writers discovered problems and inconsistencies with
existing design methodologies for steel tunnel liners and errors in some of
the buckling equations presented in various sources.
This paper covers the buckling analysis of steel tunnel liners that are acted
on by external pressure and are encased by concrete backfill of sufficient
strength and continuity that the steel liner cannot buckle outward beyond the
surface of the concrete encasement. The result is a comprehensive design
procedure for both plain and stiffened steel tunnel liners subjected to external
hydrostatic pressure. In addition to discussing the concepts behind some of
the buckling equations previously derived by others, the writers will introduce
new concepts of analysis and provide revised equations applicable to both
plain and stiffened liners.
Plain versus Stiffened Liner
The choice of plain (unstiffened) versus stiffened steel liner is primarily a
cost issue, but there are other considerations. For example, liners with di-
ameter (D) to thickness (t) ratios of more than about 300 are usually not
practical due to handling limitations. Also, the liner must have sufficient
capacity (thickness) to support required internal pressures. The external pres-
sure that will cause buckling of a specific liner is usually much lower than
the internal pressure that will induce tensile yielding. As such, a liner de-
signed for a given external pressure will typically need to be much thicker
than a liner designed for the equal, but opposite, internal pressure.
Plain steel liner has the following advantages:
• Design and analysis are well understood, and relatively simple.
• The outside diameter of a plain steel liner is less than that of a stiffened
steel liner; hence, the excavated tunnel diameter may be smaller.
• Fabrication of a plain steel liner is simpler, particularly for wall thick-
nesses less than about 20 mm. The fabrication cost per unit weight of
stiffened steel liner is generally higher than the cost per unit weight of
plain steel liner, considering the stiffener fabrication and welding re-
quired between the stiffeners and the cylinder.
Where needed for resistance against buckling, stiffened steel liner has the
following advantages:
• The stiffened liner is lighter than a plain liner.
• Because the stiffened liner requires thinner cylinder steel than plain liner,
welding costs for the circumferential groove welds that typically connect
the pipe sections together are reduced. The expense of shop and field
welding of the pipe sections together goes up at an increasing rate as
the steel cylinder becomes thicker. In addition, many steels that can be
56/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
rolled into pipes are limited in thickness due to available fabrication
machinery and other problems. This is particularly true with higher-
strength steels.
Stiffeners are installed at a specific longitudinal spacing on the steel liner,
and are usually welded (with fillet welds) around the circumference at the
exterior of the plain steel shell. Stiffeners hold the pipe in a circular shape
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
and must have sufficient moment of inertia to avoid buckling themselves.
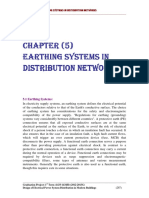
Fig. 1 shows the types of stiffeners that are commonly used. They include
cut-plate, rolled plate, rolled tees, and rolled channels. Rolled tees (flange
parallel to cylinder steel) are theoretically the most efficient structural addi-
tion; however, there are backfill concrete placement concerns at the junction
of the tees, the members are easily bent during shipping and installation, and
there can be availability limitations for heavier sections. Rolled channels (web
parallel to cylinder steel) are also structurally efficient, are sturdier than tees,
allow a greater spacing of the stiffeners due to their two connection points
with the liner, and provide some added longitudinal stiffness to the shell plate
due to continuity and the torsionally stiff closed-section created; however,
the use of rolled channels creates a void that may have to be filled. Rolled
plates oriented parallel to the shell usually do not add sufficient moment of
inertia to the liner to provide a substantial increase in buckling resistance.
Rolled or cut plates placed perpendicular to the cylinder steel are often used,
but they usually require a greater height of section than either tee or channel
stiffeners due to their comparatively low moment of inertia The writers rec-
ommend that either rolled channels or rolled or cut plate (oriented perpen-
dicular to the cylinder steel) be the first stiffener types considered in design.
Other stiffener shapes can be manufactured from rolled plate; however, the
writers recommend that hot rolled sections be used, because cold rolling can
decrease steel ductility substantially. Cold rolled sections should only be con-
sidered for situations where ductility is not a concern, or when special testing
will be used to verify that the cold rolled sections have sufficient ductility to
meet the design requirements.
Relevant Codes and Factors of Safety
The commonly used code for pressure retaining vessels is the Boiler and
Pressure Vessel Code (1995), henceforth called the Boiler Code. This code,
which covers steel vessels holding liquids and gases, which are often toxic
and under extreme temperatures, is very detailed and complex. Design pres-
sures are usually internal for boilers, although external pressure of up to one
atmosphere occurs when a vessel is under vacuum. The Boiler Code require-
ments for welding, fabrication, allowable steels, and ductility are very strin-
gent due to the potentially extreme consequences of boiler or pressure vessel
failure. The primary stress requirement of the Boiler Code is that the com-
PERPENDICULAR
ROLLED PARALLEL ROLLED OR
ROLLED TEE CHANNEL ROLLED PLATE CUT PLATE
FIG. 1. Typical Stiffener Configurations
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/57
J. Energy Eng. 1998.124:55-89.
pressive stress in the vessel shall not exceed the lesser of 2/3 of the yield
strength (Fy ) and 1/3 of the ultimate strength (Fu ) of the steel, which is defined
as the "allowable stress" (<Tall)' This stress requirement is quoted throughout
the remainder of this paper.
Although the analyses herein are elastic throughout, many of them are at
buckling (with a factor of safety equal to 1.0). In this paper the tenns "ul-
timate strength," "nominal strength," and "factored stress" are not used.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
The tenns "service load," "working stress," and "allowable stress" are used
as defined in the Manual of Steel Construction-Allowable Stress Design
(1991) and the Boiler Code. The maximum anticipated external design pres-
sure under service conditions is Pd, and the corresponding computed design
tangential stress (also known as the working stress) is <Td' The working stress
must always be no greater than the allowable stress.
Minimum values for the factor of safety (FS) for the various types of
buckling failure, stiffener weld design, and the other potential failure modes
for a steel tunnel liner must be detennined by the designer. The factors of
safety quoted herein are typical; however, appropriate values for different
structures and failure modes will depend on many conditions, including the
accuracy with which the design loading is known, the importance of the
structure, the specified (or realistically attainable) fabrication tolerances, and
the reliability of the theory that describes the failure mode.
Buckling Theories
In the past, the following theories have been used for modeling the buck-
ling of a plain or stiffened steel liner under external pressure:
1. Free-tube multilobe buckling (von Mises 1914; Donnell 1976)
2. Rotary symmetric buckling (Borot 1957; Vaughan 1956)
3. Single-lobe buckling (Jacobsen 1974; Amstutz 1970)
In addition, recent work by El-Sawy and Moore (1997) in the related field
of pipeline rehabilitation using liners of various types gives an indication that
numerical (finite-element) methods of buckling analysis may be functional in
the future. EI-Sawy and Moore have correlated critical buckling pressures
computed using a numerical model to a theory of restrained thin cylinder
liner buckling developed by Glock (1977). They then extended their results
to cases of liners with local imperfections, oval liners, and loose-fitting liners.
To the writers' knowledge, numerical modeling efforts have been limited to
the cases of plain cylinder liners, and they do not address buckling modes
that consider yielding of the liner material (as do the rotary symmetric and
single-lobe theories discussed in the following sections). For these reasons,
numerical methods serve a limited design purpose at this time.
In the discussion that follows, a summary of the underlying concepts be-
hind these buckling theories and the applicability of these theories to the
design of steel liners is presented.
Free-Tube Multilobe Buckling
Free-tube multilobe buckling theories have been developed by assuming
that a cylindrical shell, which is under unifonn external pressure, is not re-
strained from moving radially outward. As already mentioned, for the case
of a steel tunnel liner this assumption is equivalent to ignoring the presence
of the backfill concrete. Depending on the pipe geometry, end restraint, and
the magnitude of the external pressure, the pipe will tend to buckle sym-
58/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
metrically with two or more lobes. Free-tube buckling equations developed
for two different pipe end radial restraint conditions are discussed further in
the following sections.
Radially Unrestrained Thin Cylinder (Euler Buckling). When a free-
tube is under uniform external pressure, it will experience a tangential com-
pressive stress. As the external pressure increases, the cylindrical shell (which
in practice is never perfectly circular) will reach a limiting stress under which
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
it can no longer maintain its shape, and it will become unstable and fail by
buckling in a manner analogous to a slender column.
Initially, consider the case of a slender column of length Leo cross-sectional
area A, moment of inertia I, and modulus of elasticity E. Theory states that
a column will buckle in a shape similar to a plucked string of length Leo
forming an integer number of nodes. The number of nodes (n) formed de-
pends upon the columns restraint (i.e., if held only at the ends, n equals I;
if also restrained from translation in the middle, n equals 2; etc.).
The critical buckling load (Tcr ) which the column can resist is computed
by the Euler buckling equation
(I)
This equation, with n equal to 1, is used for the analysis and design of slender
columns in accordance with the Manual of Steel Construction (1991). [Those
interested can refer to Gaylord and Gaylord (1972) for a derivation of this
equation.] When a column is restrained only at its ends, the cases with n
equal to 2 or more are neglected. The critical buckling stress (O"cr) in a column
can be obtained from the foregoing equation br dividing (1) by A and sub-
stituting the square of the radius of gyration (r ) for IIA:
(2)
Using a similar approach, one can derive the equation for the critical ex-
ternal hydrostatic buckling pressure (Per) for an unrestrained thin cylinder
(plane stress condition) of radius R and thickness t:
P = (n
2
-
3
1)£1 = (n
2
_ 1)£ (.!...)3 (3)
cr R 12 R
In (3) the moment of inertia (I) is expressed per unit length of cylinder, and
n is an integer equal to 2 or more. When n is equal to 2 the buckling pressure
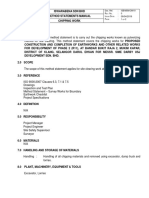
is minimized. Fig. 2 illustrates free-tube buckled shapes for different node
values.
Eq. (3) requires modification if the thin cylinder is longitudinally re-
strained. In this case, Poisson's effects resulting from the longitudinal restraint
increase the cylinder's effective tangential stiffness. The critical external
buckling pressure is computed per the following equation:
(n
2- 1)£1 1)£ (n
2- (t)3
Per = (1 - v )R = 12(1 - v 2 )
2 3 R (4)
where v = Poisson's ratio of the pipe material. The term (1 1'2) in this
equation increases the cylinder's tangential stiffness due to Poisson's effects.
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/59
J. Energy Eng. 1998.124:55-89.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
FIG. 2. Buckling of Free Tube
Eqs. (3) and (4) can be generalized as follows:
2 2
p = (n - 1)£'/ = (n _ 1)£'
(5)
cr R3 12 R
where E' (the effective modulus of elasticity) = E for a cylinder unrestrained
in the longitudinal direction (e.g., steel pipe with slip or expansion gasketed
joints); and E' = E/(1 - v 2 ) for a cylinder restrained in the longitudinal
direction. Eq. (5) is used in the rotary symmetric buckling analysis, as ex-
plained later.
It follows from (5) that the tangential stress in the cylinder «(J"cr) at the
critical buckling pressure is as follows:
(J"
(n2- 1)£' (t)2
= -'------'-- - = (n 2
- 1)£'
(r)2
- (6)
cr 12 R R
where r = radius of gyration for the cylinder.
Derivations of the foregoing free-tube buckling equations for thin-walled
cylinders can be found in TlDloshenko (1934).
Equations of the same form as those already presented are employed for
tunnel liner plate and corrugated metal pipe culvert design. As an example,
the following equation is used in the design of corrugated metal pipe culverts
(Standard 1992):
(J" = 12£' (..!.-)2 = 3£' (.!:....)2 (7)
d FS kD FSkR
where (J"d = service tangential stress; D = pipe diameter; k = factor (less than
1.0) that accounts for ground interaction; and FS = applied factor of safety.
Note that (7) is derived from (6) based on an n value of 2.
Cylinder Held Circular at Ends. If it is assumed that the ends of a
cylinder are held circular, buckling under external hydrostatic pressure will
occur with multiple symmetrical lobes, as indicated in Fig. 2; however, the
buckling mode will actually be three-dimensional (3D), and the shape of each
lobe will be roughly a 3D truncated sphere, as shown in Fig. 3.
Equations for the case where a cylinder of length L is restrained against
buckling at its ends have been derived by numerous authors such as von
Mises (1914), Donnell (1976), Southwell (1913), and Hiigge (1960). In the
resultant free-tube buckling equations the integer value of n that produces
the lowest buckling capacity is unknown, and must be determined by trial
and error (unlike the Euler free-tube case where the ends are not held circular
60 I JOURNAL OF ENERGY ENGINEERING I DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
FIG. 3. Free-Tube Multilobe Buckling
and the lowest buckling capacity always results when n is equal to 2). The
free-tube buckling equations developed by von Mises (1914) and Donnell
(1976) are
• Von Mises equation
2n - 1 - v)
E(t/R) ) E(t/R)3
2
(2n-l+---,,---
P- ( 2 +
er - (n - 1) [(nli'rrRi + If 12(1 - v 2 ) (nli'rrRi +I
(8)
• Donnell equation
E (t)3 ([n 2 + <-TrRlL)2]) Et ( (1TR/L)4 )
(9)
Per = 12(1 - v 2) Ii 2 n + Ii n 2[n 2 + (1TRlL)2f
where n = number of lobes in the complete circumference at collapse; Per =
critical buckling pressure (for a factor of safety of 1.0); R = radius to the
neutral axis of the cylinder; t = thickness of the cylinder; v = Poisson's ratio
of cylinder steel; L = length of cylinder; and E = modulus of elasticity of
cylinder steel.
Both (8) and (9) require that successive values of n be used to find the
minimum critical buckling pressure (Per). The critical value of n is not nec-
essarily the same for the two equations under the same design geometry and
material properties. In practice n is usually between 6 and 12. The following
formula from Windenburg and Trilling (1934) can be used to obtain an ap-
proximate number of lobes that produces the minimum critical buckling pres-
sure:
4 61T2(l - 2
V )112
(10)
n.pproximate = (UR)2(t/R)
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/61
J. Energy Eng. 1998.124:55-89.
Rotary Symmetric Buckling
As for the previously discussed free-tube multilobe buckling theories, ro-
tary symmetric buckling assumes that the cylinder buckles with even number
of half waves; however, rotary symmetric buckling theory takes into account
the radial restraint provided by the concrete backfill surrounding the cylinder.
Derivations of rotary symmetric buckling equations can be found in
Vaughan (1956) and Borot (1957). As derived by Vaughan, failure of a cyl-
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
inder due to rotary symmetric buckling is the result of yielding under a
combination of axial and bending stresses described as follows:
1. An initial gap may exist before the cylinder is subjected to external
pressure, due to shrinkage of the backfill concrete and the relative tem-
perature difference between the cylinder and its surrounding medium.
As increasing external hydrostatic pressure acts on the cylinder, the gap
increases due to elastic circumferential shortening of the cylinder under
the induced tangential stress.
2. When the external pressure reaches the Euler free-tube buckling stress,
the cylinder squats into an oval shape; however, the amount of squat is
restricted by the presence of the backfill concrete. More lobes will form
as the pressure is increased.
3. The distortion of the cylinder in its buckled shape results in bending
stresses due to the eccentricity of the axial load. The magnitude of the
eccentricity (Ym) is equal to the sum of the initial gap due to shrinkage
and temperature (Yo), the gap resulting from the circumferential short-
ening of the cylinder under external pressure (Y.), and an additional
distance (Yc) that accounts for the reduction in the mean circumference
of the cylinder due to the buckling distortion (i.e., due to the cylinder's
sinusoidal shape).
4. The critical buckling pressure is reached when the combined axial and
bending stress reaches the yield strength of the cylinder steel.
For a given liner geometry, the value of Per is known as a function of n
from (5), and the value of Y. is known as a function of Pcr from elastic theory.
Vaughan presents an equation that computes Yc as a function of Ym and n.
Setting the combined stress due to moment and hoop stress to the yield
strength provides an equation that correlates the yield strength with Pcr and
the eccentricity, Ym. Given that Ym is equal to the sum of Yo, Y.. and Yc, sub-
stitutions can be made that eliminate all the deformations (Yi values) and the
value of n, leaving only Pcr and known values in the equation. The critical
buckling pressure is computed by solving for Pcr in this resultant equation:
[F 2E + 6Pcr R rr (K + P E _ R rr + F24PPcrRrr =0
y - y - (11)
Fy - PcrR rr R cr rr
where Pcr = critical buckling pressure (for a factor of safety of 1.0); R =
radius to the neutral axis of the cylinder; Rrr = cylinder radius to thickness
ratio = R/t; F y = yield strength of steel; Yo = initial radial gag due to shrinkage
and temperature; K = gap ratio = yjR; and E' = E/(l - v).
Fig. 4 shows curves of R rr versus Pen computed using (11), for various
gap ratios.
The buckled shape (number of lobes) that results in the minimum critical
buckling pressure is not known a priori; however, it can be back-calculated
from the critical buckling pressure and the Euler free-tube buckling equation
62 I JOURNAL OF ENERGY ENGINEERING I DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
8000
7000 I
FJ E 261MPa
--
E = 100,000 MPa
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
-\ + - v =0.19 f--
liner restrained
IoJllitudinally
5000 -
Gap Ratio (010)
'\
I,
--0-0.00
-0-0.03
f-'
--0.06
---0.10
___ 0.10
3000
1000
R .........
:-.0....
1000
- '"-"-
o !
m rn
RIt=R,.
FIG. 4. Rotary Symmetric Buckling: External Buckling Pressure versus
Ratio
for an infinitely long cylindrical shell [(5)]. The value of n obtained from
(11) and (5) is typically not an integer, indicating that the computed critical
buckling condition is usually not possible geometrically. For verification, one
can solve the following equation, which is a solution with two unknowns
that omits the buckling equation (5), for Per at integer values of n close to
that computed from (11) and (5):
R"
PaR"
- 1) - 6R;, (K + Pcr R ,,) - n
E' 24
2
(--.&.-
PcrR"
- 1)2 = 0 (12)
The use of (12) indicates that, excluding (5), the value of Per is usually
not sensitive to the value of n assumed [Le., (11) and (12) typically generate
similar values of Per for normal ranges of n between 3 and 15]. This factor,
plus the typical noninteger value of n for the general solution for (11) and
(5) as noted previously, suggest an apparent deficiency in the rotary sym-
metric buckling approach.
Single-Lobe Buckling
As for the rotary symmetric buckling model, in single-lobe buckling theory
it is assumed that the magnitude of the gap between the cylinder and the
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/63
J. Energy Eng. 1998.124:55-89.
backfill concrete prior to buckling is the sum of the initial gap and the elastic
circumferential shortening of the cylinder resulting from the external hydro-
static pressure. Assuming that the cylinder is not prevented from becoming
detached from the backfill concrete, it follows that the cylinder will not likely
remain centered with an equal radial gap all around (as is assumed for rotary
symmetric buckling). More likely, the cylinder will rest against the material
that surrounds it on one side and have twice the average radial gap on the
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
other side. When the external pressure reaches a critical magnitude, the cyl-
inder will buckle by forming a single-lobe, as shown in Fig. 5.
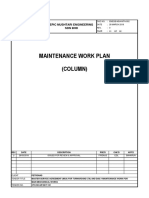
An example of single-lobe buckling of a steel tunnel liner is shown in Fig.
6. This photograph shows the 12-mm-thick, 6-m-diameter steel liner that was
installed in the Newhall Tunnel, which is part of the Metropolitan Water
District's Foothill Feeder Project.
Equations for modeling single-lobe buckling of a cylinder have been de-
rived by Amstutz (1970) and Jacobsen (1974). The Amstutz buckling equa-
tions have a simpler fonn because they assume constant values (within a
given range) for several variables used in developing the equations. There-
fore, if the values of these variables are out of their assumed range, the
Amstutz equations are invalidated. In particular, the Amstutz equations are
very sensitive to the variations in the variable E (E is a function of the ratio
of the thrust times the square of the radius to stiffness ratio of the liner). The
Amstutz equations are valid only if E is between 5 and 20. Since E is well
below 5 for a variety of stiffened liner geometries, the Amstutz equations are
not valid for many stiffened liners. In addition, the radius of gyration used
in the Amstutz equations for stiffened liners is computed by taking the cross
section of the stiffener plus the length of the liner, which is assumed to
FIG. 5. Single-Lobe Buckling
64/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
FIG. 6. Two Photographs of Single-Lobe Buckling
contribute to the moment of inertia of the stiffened section (i.e., the effective
length; see Fig. 7). Since the determination of the effective length is some-
what arbitrary (as discussed later), the radius of gyration used in the Amstutz
equations may be too large (or too small). Using a larger radius of gyration
than is warranted will produce an erroneously high liner stiffness and there-
fore a buckling capacity that is too large.
For the aforementioned reasons, and because the Amstutz equations yield
less conservative (larger) buckling capacities than the Jacobsen equations, the
writers recommend that the Jacobsen equations be used to analyze single-
lobe buckling of plain and stiffened steel liners under hydrostatic external
pressure.
The following three equations are those derived by Jacobsen for single-
lobe buckling of steel liners. Although these three equations are more com-
plicated than the single rotary symmetric buckling equation, they were de-
rived based on similar principles. Given the liner geometry, steel properties,
and gap size, the following three equations can be solved simultaneously (via
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/65
J. Energy Eng. 1998.124:55-89.
rSTEEL
SHELL
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
Z-O.78}Rt"
We • EFFECTIVE LENGTH
FIG. 7. Stiffener Effective Lengths
iteration) to compute the critical buckling pressure (Pcr) and the other two
unknowns (ex and 13):
[(9,r/4J32) - 1][11" - ex + 13 (sin cxlsin J3f]
12(sin cxlsin J3)3(ex - 11"K - J3(sin a1sin (3)[1 + (tan2(ex - (3)/4)]}
R
- =0
\fI2J/F (13a)
3
[(9,r/4J32) - 1]1 Pcr4/R
(sin cxlsin (3)3 - E' =0 (13b)
1 sin 13 ) PcrLc/R sin ex 2Pcr Lc/R 2 J3h sin2ex tan(ex - (3)
1 000 [(- - - - - h + + -=-=----'------'----'-'-
, R R sin ex E' F sin 13 311"E'1 sin2J3
- :;] = 0 (13c)
where R = radius to the neutral axis of the liner (or portion of liner) under
consideration; Lc/ = length of liner under consideration (1 for a plain liner,
center-to-center spacing of stiffeners for a stiffened liner); 1 = effective mo-
ment of inertia of the liner; F = total area of the liner of length Lc/; h =
distance from the neutral axis of liner to the extreme fiber of the liner; F y =
yield strength of steel; E' = E or E/(l - v 2 ), depending upon assumed lon-
gitudinal restraint; K = gap ratio = (radial gap size)/R; P cr = critical buckling
pressure for a factor of safety of 1.0; ex = one-half of the angle subtended to
the center of the cylindrical shell by the buckled lobe; and 13 = one-half of
the angle subtended by the new mean radius through the half waves of the
buckled lobe.
These equations are most easily solved using computer software capable
of solving the three equations simultaneously. For example, a commercially
available software package like MATHCAD (MathSoft Inc.) can be used for
this purpose.
Selection of Appropriate Buckling Theory
Global Buckling
In a stiffened liner, the steel cylindrical shell typically is of inadequate
thickness to resist the external design pressure by itself (without the stiffen-
ers). If the stiffened portion of the liner were to buckle due to inadequate
66/ JOURNAL OF ENERGY ENGINEERING I DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
stiffness, then the entire liner would become unstable. Buckling of the stiff-
ened portion of a stiffened liner and the buckling of a plain steel liner are
assumed to occur by the same mechanism (single-lobe buckling), because
the only radial restraint provided to the liner in either case is from the backfill
concrete. This buckling mechanism is referred to as "global" buckling.
Fig. 8 compares Euler free-tube buckling capacity to single-lobe (Jacobsen)
buckling capacity for a plain steel liner. This graph shows that the buckling
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
capacity for the liner is increased between approximately 4 and 26 times
(depending on the radius to thickness ratio and gap ratio) due to the restraint
provided by the backfill concrete. The increase in buckling capacity is less
pronounced, but still substantial, for smaller radius-to-thickness ratios (e.g.,
on the order of 4 to 9 times for R" from 35 to 50). This figure illustrates that
the critical buckling pressures computed under the Euler free-tube assump-
tions are much more conservative than the critical buckling pressures cal-
culated under the single-lobe assumptions.
Similarly, Fig. 9 compares rotary symmetric buckling capacity and single-
lobe (Jacobsen) buckling capacity for a plain steel liner. The rotary symmetric
equation yields critical buckling pressures from 8% to over 100% higher than
single-lobe buckling equations, depending on the radius to thickness ratio
8000
7000 --
F,-161MPa
E = 100,000 MPa
v=O.29
liDerratrained
5000 10
Gap Ratio (%)
-0-0.00
-0-0.03
__ 0.06
\ l\ , __ 0.10
...... 0.10
3000 -0- Euler Free-Tube
1000
1000 1\ "
i'o--. '-n.
x )l....; "-.
o
30 40 50 60 70 80 90 100 no 110
RIt=R,.,
FIG. 8. Euler Free-Tube and Single-Lobe (Jacobsen) Buckling: External
Buckling Pressure versus RfTRatio
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/67
J. Energy Eng. 1998.124:55-89.
8010
!
70lt0
l'y.262MPa
, E • 200,000 MPa
v=lt.29
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
lbaerrestnbaed
-
1\ loa
sapll aOO (%) - BaddiDc Mod
1\
"
__ It.lt0 - Siagle Lobe
- - 0.20 - Siagle Lobe
1\ -0- O.OD - Rotary Sym.
- - 0.20 - Rotary Sym.
3000
-
0 r--..
1\ ""
2000 i 1\
"- '" .......
'n-..
.'tl-., "a-.,
r-o..,
1000 -
o
'"
I
"--.-
"-
ill
--s:::I
m
Rlt=R.<
FIG. 9. Single-Lobe (Jacobsen) and Rotary Symmetric Buckling: External
Buckling Pressure versus RlT Ratio
and gap ratio. Both of these buckling theories take the restraint provided by
concrete backfill into account; however, rotary buckling theory produces less
conservative results.
Based on the foregoing discussion, the theoretical problems with the rotary
symmetric equation, and that experience has shown that global buckling of
steel tunnel liners usually occurs in a single-lobe, the single-lobe buckling
equations are considered appropriate for the analysis of global buckling of
steel tunnel liners (plain or stiffened). Furthermore, as discussed previously,
the writers recommend that the Jacobsen single-lobe equations be used be-
cause they are more general and conservative than the Amstutz single-lobe
equations.
Local Buckling
If the stiffened portion of the liner has a very large stiffness (thereby pre-
cluding global buckling), but the thickness of the steel cylindrical shell is
inadequate, then the liner could become unstable between the stiffeners. The
buckling of portions of the steel cylinder between the stiffeners (which them-
selves remain circular), is referred to as "local" buckling. Given this context,
local buckling is meaningless for a plain steel liner.
68/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
Due to the complexity of analyzing local buckling between the stiffeners
for a stiffened steel liner, it is typically assumed that the liner between the
stiffeners acts as a free-tube held circular at its ends by the stiffeners, and
the effective radial restraint provided by the backfill concrete is neglected.
The free-tube buckling equations developed for the case where the ends are
held circular are therefore used to analyze potential local buckling.
The writers believe this approach is somewhat conservative because it ne-
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
glects the confining effect of the concrete backfill. Additionally, the free-tube
buckling equations quoted earlier were derived under the assumption of sim-
ple support at the ends of the analyzed cylinder length (i.e., the ends of the
cylinder are free to rotate and to approach each other). Continuity of the
cylinder across the stiffeners and torsional rigidity provided by the stiffeners
increase the local buckling strength to some extent; however, the writers
know of no way to estimate the effects of the backfill concrete and partial
fixity at the supports on the buckling strength for this local buckling mode.
Of course, both effects provide added safety.
Analysis of Plain Steel Liner
The required thickness of a plain steel liner being designed to resist ex-
ternal hydrostatic pressure depends on the radius of the liner, the strength of
the steel being employed, and the service external design pressure to be
resisted (Pd ).
Even though buckling is typically the critical failure mode for plain steel
liner, as a starting point the minimum required thickness of a plain steel liner
should be computed based on codified allowable stress considerations. As
discussed earlier, the maximum allowable stress «(Jall), according to the Boiler
Code, is the lesser of 2/3 of the steel yield strength and 1/3 of the steel
ultimate strength. As a result, the minimum thickness of the shell required
for resisting the design external hydrostatic pressure is computed as follows,
with Ro equal to the external radius, and other terms as defined previously:
(14)
As recommended previously, the single-lobe (Jacobsen) buckling equations
should then be used to analyze the buckling behavior of plain steel liner
under external hydrostatic loading. A trial-and-error procedure is used to de-
termine the cylinder thickness required to resist buckling. The critical buck-
ling pressure can be computed for a range of cylinder thicknesses. The se-
lected thickness should provide a sufficient factor of safety (FS) against
buckling when the liner is resisting the service design pressure (i.e., Pd should
be less than or equal to PJFS). As recommended by Jacobsen, a factor of
safety between 1.3 to 1.5 against single-lobe buckling failure is commonly
used when no gap is assumed; however, the factor of safety can be reduced
if a gap is considered. Some judgment must be employed choosing the factor
of safety, since its meaning is not readily evident.
The general Jacobsen single-lobe equations presented previously can be
customized for plain steel liners by substituting t 3/12 for J, t for F, tl2 for h,
and 1 for Lei. Given a liner geometry (R and t-note that R" has been sub-
stituted for Rlt), steel properties (Fy, E, and v), and gap size, the following
three equations can be simultaneously solved by iteration to obtain the critical
external buckling pressure (Per):
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/69
J. Energy Eng. 1998.124:55-89.
12(sin alsin - 7rK - alsin + (tan2(a
- R" = 0 (l5a)
- 1)
(15b)
(sin alsin
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
1,000 [(I - a») + PaR" sin a +
E' sin
2
sin a tan(a -
37rE'
- = 0 (15c)
In order for the critical buckling pressure computed by these equations to
be valid, the tangential stress level in the liner must not exceed 80% of the
yield strength of the steel being used. When the stress level exceeds this
value, the stress-strain behavior of steel tends to become nonlinear. Hence,
if the tangential stress resulting from the computed critical buckling pressure
(computed as PerRit, where R o is the outside radius of the cylinder) exceeds
80% of the yield strength, the modulus of elasticity used in the foregoing
equations should be reduced to an appropriate tangent modulus of elasticity
(Et ) in order for the computed critical buckling pressure to be valid. For most
plain steel liners, the tangential stress resulting from the critical buckling
pressure will rarely approach 80% of the steel yield strength. In the event
that the tangential stress exceeds 80% of the steel yield strength, the following
equation can be used to compute the tangent modulus for a value of tangential
stress (0) and steel yield strength (Fy ):
Et = E [1 - (5 ;y - 4YJ for 0.8 ;y 1.0 (16)
The use of this reduction is somewhat complex because the critical buckling
pressure is a function of the tangent modulus, and the tangent modulus is
function of the tangential stress level in the liner at the critical buckling
pressure. Since using this reduction can be tedious, and variations in E sig-
nificantly affect the buckling capacity of the liner, the writers recommend
«T
that liners be designed such that the tangential stress d) resulting from the
service external design pressure (Pd) multiplied by the minimum required
factor of safety against single lobe buckling (FS.,.min) remains below 80% of
the yield strength:
PdRoFSslmln
(J"dFSst,mln = . 0.80Fy (17)
t
The use of (16) for reducing the elastic modulus, and the computation of
the resulting factor of safety against single-lobe buckling, are demonstrated
in design example 2.
Design Example I-Plain Steel Liner
Assume a liner with the following geometry and material properties is
subjected to a service external pressure (Pd ) of 1,240 kPa (180 psi):
• Inside radius (R;) = 1,511.6 mm (59.5 in.)
• Poisson's ratio (v) = 0.29
70 I JOURNAL OF ENERGY ENGINEERING I DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
• Modulus of elasticity (E) = 200,000 MPa (29,000 ksi)
• Yield strength (Fy ) = 221 MPa (32 ksi)
• Ultimate strength (Fu) = 400 MPa (58 ksi)
Deriving the minimum thickness required to resist buckling is an iterative
process. A thickness of 25.4 mm (1.0 in.) is selected for this example as an
initial guess.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
The allowable tangential stress «(Tall) per the Boiler Code is computed as
(Tan = min GFy> F.) = min(147 MPa, 133 MPa) = 133 MPa (19.3 ksi)
Based on the assumed thickness of 25.4 mm, the outside radius (Ro ) is
1,537 mm (60.5 in.). The minimum thickness required is computed from (14)
as follows:
PdRo (1,240 kPa) (1,537 mm)
t 2:: - -
(Tan
= (133,000 kPa)
= 14.3 mm (0.564 in.)
Therefore, the assumed thickness of 25.4 mm (1.0 in.) is acceptable. Based
on this thickness, the radius to the centerline (R) is 1,524 mm (60 in.) and
the radius-to-thickness ratio (R n ) is 60.
For this example, the desired factor of safety against single-lobe buckling
(FSs'.min) is 1.5. It is further assumed that the liner is restrained longitudinally.
The effective modulus is therefore
E
E' = 2 = 218,364 MPa (31,663 ksi)
(l - v)
Assuming a radial gap (Yo) of 0.61 mm (0.024 in.) between the steel liner
and the backfill concrete, the gap ratio is equal to
Yo 0.61 mm
K =-R = 1,537 mm = 0.0004
Given this information, the three Jacobsen single-lobe buckling equations
[(15a), (I5h), and (I5c)] are solved simultaneously by iteration, and the fol-
lowing results are produced: P cr = 2,030 kPa (294 psi); at = 53.9°; and 13 =
53.4°. The computed factor of safety is
Pcr 2,030 kPa
FS sl = Pd = 1,240 kPa = 1.64 2:: FsI•mio = 1.5
=:} Actual factor of safety is sufficient (if valid)
For the factor of safety computed using the buckling equations to be valid,
the tangential stress «(Tc,) induced in the liner by the critical buckling pressure
must not exceed 80% of the material yield strength. In this case
(2,030 MPa) (1.537 m)
(Tcr = (0.0254 mm) = 123 MPa (17.8 ksi) < 0.80Fy = 177 MPa (25.6 ksi)
The computed safety factor of 1.64 against buckling is therefore valid, and
the liner is acceptable to resist the design external pressure.
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/71
J. Energy Eng. 1998.124:55-89.
Design Example 2-Plain Steel Liner
Assume the following plain steel liner is subjected to a service external
pressure (Pd ) of 4,830 kPa (700 psi):
• Inside radius (R t) = 558.6 rom (22 in.)
• Poisson's ratio (v) = 0.29
• Modulus of elasticity (E) = 200,000 MPa (29,000 ksi)
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
• Yield strength (Fy ) = 221 MPa (32 ksi)
• Ultimate strength (F.) = 400 MPa (58 ksi)
As in design example 1, a thickness of 25.4 rom (1.0 in.) is selected for
this example as an initial guess. In addition, from design example 1, a all is
133 MPa (19.3 ksi). Based on the selected thickness, the outside radius (Ra )
is 584 rom (23 in.). Per (14),
PdRo (4,830 kPa) (584 rom)
t - - == = 21.2 rom (0.835 in.)
aall (133,000 kPa)
The selected thickness of 25.4 rom (1.000 in.) is larger than that required by
(14) and is therefore acceptable. Based on this thickness, the radius to the
centerline (R) is 571 rom (22.5 in.), and the radius to thickness ratio (R n ) is
22.5.
For this example, the minimum desired factor of safety against single lobe
buckling (FS.,.min) is 1.5. It is assumed that the liner is restrained longitudi-
nally; therefore, as in design example 1, the effective modulus (E') is equal
to 218,364 MPa (31,663 ksi). The assumed radial gap between the steel liner
and the concrete backfill is assumed to be zero; therefore, the gap ratio (K)
is equal to zero.
Given the foregoing information, the Jacobsen single-lobe buckling equa-
tions are solved simultaneously by iteration, and the following results are
produced: Pc, = 9,017 kPa (1,307 psi), a = 105.0°, and p = 104.9°. The
computed factor of safety is
Per 9,017 kPa
FS., == P == 4,830 kPa == 1.87 F.,..- = 1.5
d
::::) Computed factor of safety is sufficient (if valid)
For the factor of safety computed using the buckling equations to be valid,
the tangential stress (a c,) induced in the liner by the critical buckling pressure
must not exceed 80% of the material yield strength. In this case
(9.017 MPa) (0.584 m) . 256 k .
erc, == == 207 MPa (30.1 ksl) > 0.80F, == 177 MPa ( . 51)
(0.0254 mm)
The computed safety factor of 1.87 against buckling is therefore not valid.
However, per (17),
PdRoFS.1,m;D (4.830 MPa) (0.584 m)(1.5) 66 6 MP 242 ks')
t 0.80F, ::::) (0.0254 m) == 1 . a (. 1
< 177 MPa (25.6 ksi)
The 25.4 rom shell thickness is therefore adequate, even though the computed
safety factor is not valid.
72/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
In order to find the lower bound of the safety factor against single-lobe
buckling, the critical buckling pressure (Per) that would induce a tangential
stress (O"cr) of 80% of yield strength (Fy ) in the liner is computed as follows:
O"ert (0.0254 m) (177 MPa)
O"er = (0.80)(221 MPa) = 177 MPa Per =-R = 584
(0. m)
o
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
= 7.70 MPa (1,116 psi)
The computed factor of safety at this stress level (i.e., O"eriFy = 0.80) is
FSs/ = Per = 7,700 kPa = 1.59
Pd 4,830 kPa
The true factor of safety against buckling therefore lies between 1.59 and
1.87.
In order to determine the true factor of safety in this case, an iterative
process is used. Values of Per are computed based on an assumed modulus
(E) and then the tangent modulus (E,) is computed from Per until the assumed
modulus and the computed tangent modulus match. Table 1 presents this
iterative data. In the first row a critical buckling pressure (Per) of 9,017 kPa
is computed from Jacobsen equations by using a modulus of elasticity of
200,000 MPa; this Per induces a tangential stress (O"er) of 207 MPa (30.0 ksi)
in the liner. Eq. (16) is then used to compute the corresponding tangent
modulus (E,) of 104,768 MPa (15,200 ksi) from the stress level (O"erlFy) of
93.8%. Values in the subsequent rows of the table are similarly computed.
As already discussed, the actual critical buckling pressure is found where
the tangent modulus (E,) computed from the stress level equals the assumed
modulus (E). The results in Table 1 indicate that if a modulus of 154,314
MPa (22,380 ksi) is used, the assumed modulus and the tangent modulus are
equal. Therefore, the true value of Per is 8,608 kPa (1,248 psi). This represents
a 4.5% reduction in critical buckling pressure from the originally computed
value of 9,017 kPa. The tangential stress at buckling (O"er) equals 198 MPa
(28.7 ksi), and the actual factor of safety against buckling is
FS _ Per _ 8,608 kPa - 1
s/ - P d - 4,830 kPa - .78
Analysis of StifJened Steel Liner
As mentioned previously, for stiffened steel liners it is assumed that free-
tube buckling (per von Mises or Donnell) is critical for local buckling of the
shell between the stiffeners, and single-lobe buckling (per Jacobsen) is critical
for the global buckling of the composite cylinder and stiffener section. No-
tation for stiffened liners is indicated in Figs. 7 and 10.
TABLE 1. Design Example 2: Iterative Values of Modulus of Elasticity
Assumed modulus, Critical buck- Stress level, Tangent modulus,
E ling, Per Stress, U er uc/Fy E,
[MPa (ksi)] [kPa (psi)] [MPa (ksi)] (%) [MPa (ksi)]
(1) (2) (3) (4) (5)
200,000 (29,000) 9,017 (1,307) 207 (30.0) 93.8 104,768 (15,200)
165,000 (24,000) 8,722 (1,265) 201 (29.1) 90.7 142,338 (20,640)
152,000 (22,000) 8.582 (1,244) 197 (28.6) 89.2 156,893 (22,750)
154,314 (22,300) 8.608 (1.248) 198 (28.7) 89.6 154.313 (22,380)
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/73
J. Energy Eng. 1998.124:55-89.
LeL
.. I
-------i-------
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
'""
Astf
E-.--.-.-.-...-.-.-.-.----------- __ tt
-r
J=MOMENT OF INERTIA OF EFFECTIVE SECTION
h=MAX(ho, hi)
Z, = Z2= O.78SJRt
Z, '" .!oz
Z2'" %
EFFECTIVE SECTION
FIG. 10. Notation for Stiffened Lining (Channel Stiffener Shown)
The following is a summary of the step-by-step procedure that can be used
in designing a stiffened steel liner under external hydrostatic pressure:
1. The shell thickness is determined based on a general yielding failure
(stress) criterion.
2. With a given shell thickness, the stiffener spacing is determined by
considering the local buckling of the shell between the stiffeners using
the von Mises and Donnell free-tube buckling models.
3. The stiffener size is determined by considering the global buckling of
the liner using the Jacobsen single-lobe buckling model.
4. The stiffener weld size is determined based on the load on the con-
necting weld between the stiffener and the shell as computed by a vec-
torial combination of horizontal shear and tensile radial load.
Shell Thickness
It is generally assumed that the maximum tangential working stress in the
shell (computed as PdRolt) is unaffected by the presence of the stiffeners, and
this stress is equal everywhere in the shell. (This assumption is close to reality
in most cases, as it can be shown that the stiffeners only affect the tangential
stress in close proximity to the stiffeners.) As for plain steel liner, the max-
imum allowable stress (<Tall), according to the Boiler Code, is the lesser of
2/3 of the steel yield strength and 1/3 of the steel ultimate strength.
74/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
Considering the foregoing, the minimum thickness of the shell required
for resisting the design external hydrostatic pressure is computed as follows,
with terms as defined previously:
(18)
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
The steel thickness computed in this manner will be the thinnest possible;
however, using the thinnest steel will result in the closest required stiffener
spacing. Ideally, the shell thickness should be between about 6 and 20 mm
due to handling and fabrication limitations.
Stiffener Spacing
Free-tube buckling is assumed critical for local buckling of the shell be-
tween stiffeners. The writers recommend that the maximum clear spacing
between the stiffeners (L) allowed for a specific design pressure (Pd ) be de-
termined by both the Donnell and von Mises equations, and the smaller com-
puted spacing be selected for design. In both equations the optimum value
of stiffener spacing for a specific design pressure is obtained by iteration.
This iterative process is as follows:
1. Values of p cr.ft are computed for a selected L and various n values,
ranging from a few integers less than napproximate to a few integers greater
than napproximate. The minimum p cr.ft is used in design. If pcr.tlFSft.min
(FSft.min is equal to the minimum factor of safety against free-tube buck-
ling failure) is equal to or slightly greater than P d , then the optimum L
has been found.
2. If pcr.tlFSft,min is less than P d , then L needs to be decreased and the
iterative process repeated.
3. If pcr.tlFSft,min is significantly more than P d , then L can be increased and
the iterative process repeated to produce a less conservative design.
Moore (1990) recommends that the minimum factor of safety (FSft.min) used
for this local buckling case be about 10% higher than that used for global
(single-lobe) buckling. The writers agree with this recommendation. For ex-
ample, if a factor of safety against single-lobe buckling failure of 1.5 is
chosen for the design, it would be appropriate to use a factor of safety of
1.65 for design against free-tube buckling failure.
If the computed stiffener spacing is too small for practical purposes, then
the shell thickness should be increased and the process repeated to obtain a
revised stiffener spacing.
Effects of Stress Levels on Shell Thickness Requirement. As for the
plain steel liner, in theory in order for the critical buckling pressure (Pcr.ft ,
computed by the free-tube buckling equations in the previous section) to be
valid, the tangential stress level in the shell should not exceed 80% of the
yield strength of the steel being used:
P R P R
U'cr = 0.80Fy t cr.ft 0 (19)
t O.80Fy
Satisfying this criterion often requires using thicker shell steel than is nec-
essary to meet the Boiler Code allowable stress limits.
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/75
J. Energy Eng. 1998.124:55-89.
As noted in earlier, the free-tube buckling model is somewhat conservative
in predicting local buckling because the presence of the backfill concrete and
partial fixity at the stiffeners is ignored. Additionally, to the writers' knowl-
edge, the 80% of yield criterion has never been specified for the free-tube
buckling model. For these reasons, the writers recommend ignoring the 80%
of yield criterion when the factor of safety for local (free-tube) buckling is
at least 10% greater than the minimum factor of safety specified for global
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
(single-lobe) buckling. Designers should note that if this criterion is exceeded,
the actual factor of safety against local buckling will be somewhat less than
the computed factor of safety. The effect on the factor of safety when 80%
of yield is exceeded is illustrated in design example 3.
Effective Length of Liner for Global Buckling
When using the Jacobsen single-lobe equations to analyze global buckling,
only a portion of the stiffened liner section (henceforth referred to as the
"effective section") is assumed to provide moment of inertia to resist buck-
ling; however, the entire composite stiffener-shell section is assumed to resist
compressive tangential stresses due to external pressure. Before proceeding
with the single-lobe buckling analysis, it is necessary to expand on the con-
cept of the "effective section."
The portion of the lining that is assumed to provide moment of inertia in
resisting global buckling includes the stiffener itself and a length of the shell
that will be referred to as the "effective length," as shown in Fig. 7. A variety
of effective lengths have been quoted by various authors. To the writers'
knowledge, no previously published paper on the topic of stiffened steel liner
design for external pressure explains or even references a source for the
theoretical basis of the often quoted value of 1.56(Rt)1J2 [an equivalent value
of 1.1O(Dt)'fl is given in the Boiler Code] for the total effective length [e.g.,
see Jacobsen (1974) or Moore (1990)]. Because the results of the single-lobe
buckling analysis depend heavily on the chosen effective length, it is impor-
tant to understand the source of this value.
For a stiffened thin plate, the effective length of the plate is typically
defined as "the width of that portion of the sheet which, if it developed the
same stress as the stiffener (and, by definition, the sheet at the stiffener),
would carry the same load as is actually carried by the entire sheet" (Young
1989).
This concept can be extended to the case of a stiffened steel liner. When
a stiffened steel liner is acted on by external pressure, the induced tangential
stress in the shell at the stiffener is reduced by the presence of the stiffener.
The stiffener is pulled inward by the shell at the stiffener connection point
(or points in the case of a channel stiffener). The reaction (a circumferential
line load of magnitude w) between the stiffener and the shell produces the
compressive tangential stresses experienced by the stiffener, as well as (from
an equal and opposite reaction) tangential tensile stresses in close proximity
to the stiffener that act to reduce the net tangential compressive stress induced
in the shell. In this case, the effective length would be the length of an
imaginary shell subject to the line load w at its midpoint (the stiffener con-
nection point), such that, if the developed tangential stress in the imaginary
shell is equal to the tangential stress induced in the actual shell (due to the
line load w) at the stiffener connection point, the imaginary shell would carry
the entire thrust induced in the actual shell by the line load w. It is assumed
that the imaginary shell has the same geometric (except length) and material
properties as the actual shell and deflects the same amount as the actual shell
at the stiffener connection point. It is further assumed that the tangential stress
76/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
(due to line load w) in the imaginary shell is unifonn across the full length
of the imaginary shell. This effective length can be found by dividing the
total thrust (due to the line load w) by the product of the tangential stress in
the shell (induced by the line load w at the stiffener connection point) times
the shell thickness. The thrust is easily computed as the line load multiplied
by the liner radius (i.e., wR); however, the tangential stress induced in the
shell by a line load is much more difficult to determine. A solution to this
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
problem is given by Bugge (1960). Bugge shows that the tangential stress
in the shell at the point of application of the line load is
rr = @--vt3(l - v 2) + C?S2>.. (200)
t -y t smh 2>" + sm 2>"
where
--vt3(1 - v 2 )
>.. = 4, (20b)
2vRt
Dividing the thrust (wR) by the product of the tangential stress (rr) and the
shell thickness (t), one computes the effective length (z):
VRt sinh 2>" + sin 2>"
z= "¢!3(1 _ v2) cosh2>.. + cos2>.. (21)
The effective length is maximized as Lei 00:
2VRt
zmax - "¢!3(l _ v 2 ) (22)
One can show that the effective length converges to this maximum value
quickly as the stiffener spacing is increased. In fact, for typical stiffener liner
geometries the stiffeners are sufficiently far apart that they can be assumed
not to interact with one another.
Plugging in a typical value of Poisson's ratio for steel of 0.3, (22) simplifies
to the familiar value of 1.56(Rt)ln.
Alternative approaches to calculating an effective length are available. For
instance, the Manual of Steel Construction (1991) addresses the effective
width (length) of compression members in Section B5, its commentary, and
Appendix B. Per the American Institute of Steel Construction, the effective
length of a stiffened steel liner is a function of the stiffener spacing, the shell
thickness, and the stress in the stiffened liner. Using this approach one will
find that for a stiffened liner the effective length will virtually always be 30
or more times the thickness of the shell. Amstutz (1970) uses 30 times the
shell thickness as the effective length of shell in his computations. The ef-
fective length computed by this method will be larger than 1.56(Rt)ln for a
stiffened liner of typical dimensions; for this reason, the writers recommend
that 1.56(Rt)ln be used as the effective length for the analytical procedure
outlined in the following section.
Stiffener Size
The composite section made up of the stiffener and liner shell is designed
to resist an external radial load at buckling equal to the external pressure
times the factor of safety times the stiffener center-to-center spacing, LeI. The
length of the steel shell used in the "effective section" (i.e., for computing
the effective moment of inertia and the neutral axis of the stiffened section)
is 0.78(Rt)ln, on each side of the stiffener, projected from the stiffener as
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/77
J. Energy Eng. 1998.124:55-89.
shown in Figs. 7 and 10. The effective length cannot be more than half the
clear spacing between the stiffeners (i.e., the effective lengths from adjacent
stiffeners cannot overlap).
Once the shell thickness and the stiffener spacing are determined as out-
lined in the previous sections, the general Jacobsen equations (13a), (13b),
and (13e) are used to determine the required stiffener size, as follows:
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
1. A stiffener type and size are selected, and the following properties of
the composite section are calculated:
a. Total area (F): The sum of the stiffener area (A,If) and the total
area of the shell tributary to the stiffener (Lei' t). This is not the
area of the "effective section."
b. Effective moment of inertia (J): The moment of inertia of the
"effective section."
e. The distance from the neutral axis of the "effective section" to
the extreme outer fiber of the stiffened section (h).
d. The radius to the neutral axis of the "effective section" (R.).
2. Using the section properties computed above, the general Jacobsen
equations [i.e., (13a), (13b), and (13e)] are solved simultaneously by
iteration to determine Pcr,sl such that Pcr,sIIFSs/.min (FSs/.min is equal to the
minimum factor of safety against single-lobe buckling failure) is greater
than or equal to Pd'
3. If the computed Pcr,sl is such that Pcr,sIIFSs/.min is less than P d , then the
stiffener size needs to be increased and the process repeated from step
1. If the required stiffener size is larger than any commercially available
size, then either a special section must be fabricated or the stiffener
spacing decreased; alternatively, the shell thickness could be increased.
If the computed value of Pcr,sl is such that Pcr,sIIFS.1•min is substantially
greater than Pd , then the stiffener size can be decreased and the process
repeated from step 1. Iterations should continue until an economical
stiffener size is found.
4. As a final check, the average stress in the liner should be computed, as
explained previously. The average tangential stress induced by the crit-
ical buckling pressure over the entire cross-sectional area (ITave•cr) should
be kept below 80% of yield in order for the Jacobsen formulation to
be valid, or the value of E must be modified to determine the actual
factor of safety against single-lobe buckling failure. In other words,
(23)
If the foregoing criterion is not met, the safety factor (computed as
against single lobe buckling is not valid and Pcr,sl should be
Pcr,sIPd )
recomputed using a reduced E. If the recomputed Pcr,sl results in an
insufficient factor of safety, then either the shell thickness or the stiff-
ener size will need to be increased, or the stiffener spacing will need
to be decreased. Often, the first option will be the most cost-effective
one.
Stiffener Weld
In general, load at the weld between the stiffeners and the shell comes
from two sources: (I) Horizontal shear forces due to sliding forces at buck-
78/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
ling; and (2) tension forces as the shell pulls the stiffener inward. During
service conditions, with a perfectly round pipe, actual loads will be in tension
only.
Horizontal shear at buckling can be computed per "Steel Penstocks"
(1993) as follows:
('ITa) (1 "J'
'lT
2
(24)
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
)
V = EJ p2 -
VQ
T=- (25)
J
where V = maximum total horizontal shear at buckling; T = horizontal shear
per linear unit at the base of the stiffener where it is welded to the shell; Q
= static moment of the area of external portion of stiffener alone about the
neutral axis of the "effective section"; a = amplitude of the buckled wave
= (v'IT)tan(a - 13); p = new mean radius of curvature = R(sin a1sin 13); and
L = half wave length of the buckled wave = (p13)/1.5.
The tension force at the weld can be computed by various methods de-
pending on the assumptions made and the degree of accuracy required. A
simple and conservative method is presented herein, with the basic assump-
tion that the computed thin cylinder tangential stress in the stiffener and the
shell are equal everywhere. The design weld tension force is the load at the
stiffener connection point (or points) required to produce a tangential stress
in the stiffener equal to the average tangential stress «(I,ve,d) in the stiffened
liner induced by the design external pressure, where
(26)
This approach is conservative because more complex analysis shows that the
tangential stress in the stiffener is actually less than average tangential stress
in the stiffened liner under working conditions. More complex methods in
which the actual stress distribution in the stiffened liner is considered can be
used; however, it is rarely necessary to go to this level of detail.
Assuming a line load from a single weld at radius Ro , the service tension
load per unit length (w) is
Asif A'if
W = (I,Ye,d - = PdLcl - (27)
Ro F
The computed shear and tension loads are vectorially combined to produce
a conservative design weld load. The minimum total service (working) force
per unit length (Tweld), for which the weld should be designed is
Tweld = Vw 2
+ (28)
In (28), or is an ultimate force, while w is a working force. Since TWeld is
considered to be a working load, (28) is conservative. If a pair of fillet welds
is used to connect the stiffener to the shell, the size of the fillet welds on
each side of the stiffener shall be such that O.5Tweld is no greater than the
allowable unit load for that size weld.
Some codes do not permit the use of intermittent welds, and most codes
have minimum size fillet welds based upon the thickness of abutting metals.
For example, the Boiler Code requires that the minimum fillet weld leg size
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/79
J. Energy Eng. 1998.124:55-89.
be no less than the smallest of 6.4 mm (114 in.), the shell thickness at the
weld location, and the stiffener thickness at the weld location. If structural
tees with then webs are used, it is recommended that the weld be sufficient
to develop the web of the tee. If rolled channels are to be used for the
stiffeners with continuous welds on both flanges, the writers' experience is
that continuous 6.4 to 8 mm fillet welds are usually sufficient.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
Design Example 3-Stiffened Steel Liner
Assume a steel liner, with the following geometry and material properties,
is subjected to a service external pressure (Pd ) of 1,034 kPa (150 psi):
• Inside radius (R i ) = 1,854 mm (73 in.)
• Poisson's ratio (v) = 0.29
• Modulus of elasticity (E) = 200,000 MPa (29,000 ksi)
• Yield strength (Fy ) = 262 MPa (38 ksi)
• Ultimate strength (Fu) = 483 MPa (70 ksi)
As in the first two examples, a thickness of 25.4 mm (1.0 in.) is selected
for this example as an initial guess. The allowable tangential stress «Tall) per
the Boiler Code is computed as
(Tall = min G Fy , F u ) = min (175 MPa, 161 MPa) = 161 MPa (23.3 ksi)
Based on the selected thickness of 25.4 mm, the outside radius (Ro ) is
1,879.4 mm (74.0 in.). The minimum thickness required based on stress con-
siderations is computed from (14) as follows:
t
PdR o
--
(Tall
= (1,034(161,000
kPa) (1,879.4 mm)
kPa)
= 12.1 .
rnm (0.475 10.)
For this example, stiffeners will be used to reduce the thickness of the steel
shell. Based on the foregoing, a thickness of 15.88 mm (5/8 in.) is selected
for the shell thickness. Based on this thickness, the outside radius of the shell
(Ro ) is 1,870 mm (73.62 in.) and the radius to the center line (R) of the shell
is 1,862 mm (73.3 in.). As an initial guess, CIOX20 channel stiffeners in-
stalled on a center-to-center spacing (Lei) of 1,778 mm (70 in.) are selected.
The clear spacing (L) between the stiffeners is therefore 1,524 mm (60 in.).
For stiffened lining notation refer to Fig. 10.
First, the free-tube buckling capacity of the 15.88 mm (5/8 in.) thick shell
between the stiffeners is checked to determine the acceptability of the selected
stiffener spacing. From (10), the approximate number of lobes (napproxima",) that
produces the minimum free-tube buckling pressure is
4 6'11'2[1 - (V)2]1I2 4 611"2[1 - (0.29)2]112
napproximate = (UR)'(tIR) (1,524 mm11,862 rnm)'(15.88 mm11,862 rnm)
=10
Table 2 presents critical free-tube buckling pressures (Per•ft ), computed using
the von Mises equation, (8), for a range of n values and an L of 1,524 mm
(60 in.).
The minimum value of P er•ft , from Table 2, is 1,675 kPa (243 psi) at n
values of 9 and 10. Similarly, using (9) for Donnell free-tube buckling, the
80 I JOURNAL OF ENERGY ENGINEERING I DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
TABLE 2. Design Example 3: Free-Tube Buckling Pressures
Per,.
n [kPa (psi»)
(1 ) (2)
7 2,703 (392)
8 1,924 (279)
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
9 1,675 (243)
10 1,675 (243)
11 1,800 (261)
12 1,993 (289)
minimum value of P er.ft is 1,752 kPa (254 psi) at an n value of 10. In this
case, the von Mises equation yields a lower free-tube critical buckling pres-
sure; therefore, the factor of safety against free-tube buckling (FSft) is
Per ft 1,675 kPa
FSjl =- ' = = 1.62
Pd 1,034kPa
For this example, a minimum factor of safety against single lobe buckling
(FSs1.min) of 1.4 is desired. From the foregoing, it is seen that the factor of
safety against free-tube buckling (FSft) is 16% larger than the minimum re-
quired factor of safety against single lobe buckling (FSs1.min)' The factor of
safety against free-tube buckling (FSjl) is acceptable since it provides more
than the 10% additional capacity, as recommended previously. Hence, the
stiffener centerline spacing (Lcl ) of 1,778 mm (70 in.) is acceptable for the
C1OX20 channel stiffeners [given a shell thickness of 15.88 mm (5/8 in.)].
For information purposes, per (19), the tangential stress in the shell should
not exceed 80% of the yield strength of the steel being used for the computed
factor of safety against free tube buckling to be valid:
Per,jlR o (1.675 MPa) (1,879 mm)
<J'cr =- t
-= (15.88 mm)
= 198 MPa (28.7 ksl).
< 210 MPa (30.4 ksi)
Therefore, this unessential criterion is met, and the factor of safety of 1.62
against free-tube buckling (FSjl) is valid.
Next, the stiffener size must be checked for single-lobe buckling, using
the Jacobsen equations (13a), (13b), and (13c). For a CI0X20 channel:
• Range width (bf ) = 69.6 mm (2.739 in.)
• Area (A-lfl) = 3,794 mm2 (5.88 in?)
• Depth (d) = 254 mm (10.00 in.)
• Range thickness (tf ) = 11.1 mm (0.436 in.)
• Distance from outside of web to neutral axis (x) = 15.4 mm (0.606 in.)
• Moment of inertia about x-x axis (l) = 1.17 X 106 mm4 (2.81 in.4 )
The effective lengths (Zl and Z2) of the liner on either side of the channel
stiffener, as shown in Fig. 10, are
Z\ = O.78VRt = O.78V(I,862 mm)(15.88 mm) = 134 mm <!:.2 = 762.5 mm
Z, = 134 mm
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/81
J. Energy Eng. 1998.124:55-89.
d
Z2 = Z\ = 134 mm > "2 = 127 mm => Z2 = 127 mm
Therefore, the total effective length per each flange of the channel (i.e., 0.5W.
= Z\ + Z2) is equal to 261 rom (10.28 in.) and the total effective length (W.)
per channel is 522 rom (20.55 in.).
Based on the foregoing, the following values are computed for the Jacob-
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
sen single-lobe buckling analysis:
h. = .o..(t/_2.:....)('-.-t_·
• (t· W.) + A Sif
(1/2)(15.88 mm)'(522 mm) + (69.6 mm - 15.4 mm + 15.88 mm)(3,794 mm2)
h· = -=---....:....:...----'-'----:-:-':-.......:..
, (15.88 mm)(522 mm) + (3,794 mm2)
= 27.45 mm (1.08 in.)
ho = t + bf - hi = 15.88 mm + 69.6 mm - 27.45 mm = 58.0 mm (2.28 in.)
h = max(h i, ho ) = 58.0 mm (2.28 in.)
J= 1 + (t + b -.i _ h.)2A
f • sif
+ W.t
12
3
+ (h. _
'2
:.)2 (t.W)
•
J = (1.17 X 106 mm4 ) + (42.63 mm)'(3,794 mm2 ) + (522 mmi
+ (27.45 mm)2(8,289 mm2)
J = 1.14 X 107 mm4 (27.4 in. 4 )
R = R. = R, + hi = 1,854 mm + 27.45 mm = 1,881.45 mm (74.1 in.)
F = A Sif + LeI(t) = 3,794 mm + (1,778 mm)(15.88 mm) = 32,029 mm2
2
= 49.64 in.2
It is assumed that the liner has gasketed joints; hence, it is not restrained
longitudinally and E' is equal to 200,000 MPa (29,000 ksi). It is further
assumed that the gap ratio (K) is 0.0003. Given these values, the Jacobsen
equations (13a), (13b), and (13c) are solved simultaneously by iteration to
obtain P cr = 1,748 kPa (254 psi); a = 85.235°; and = 84.985°. The computed
factor of safety against single lobe buckling is
P cr 1,748 kPa
FS S
I =-P = 1,034 kPa = 1.69 > F./_' = 1.4 D
d
=> Computed factor of safety is sufficient (if valid)
In accordance with (23), the average tangential stress (uave •cr) induced by
the critical buckling pressure over the entire cross-sectional area should be
kept below 80% of yield in order for the factor of safety, computed using
the Jacobsen formulation, to be valid:
_ Pcr Ro4, _ (1,748 kPa) (1,879.4 mm)(1,778 mm) _ 182 263 k .)
Uave.cr - - 2 - MPa ( . SI
F (32,029 mm )
:S 210 MPa (30.4 ksi)
82/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
The foregoing stress criterion is met; therefore, the factor of safety of 1.69
against single-lobe buckling is valid and the stiffened liner design is suffi-
cient.
The weld design is the final step. The shear load per unit length of weld
(T) is computed from (24) and (25) as follows:
p =R sin-a) = 1,862 nun (sin(85.235
0
») = 1,863 nun (73.33 .
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
(-
sin sin(84.985°)
In.)
L = = (1,863 nun) (1.483 rad) = 1,842 nun (72.52 in.)
1.5 1.5
a = (:;;:L) tan(a - 13) = (1,842'iT nun) tan(85.235° - 84.985°) = 2.56 nun (0.10 10.)
.
Q = Astf{h - x) = (3,794 nun2 )(58.0 nun - 15.4 mm) = 161,624 mm3
2
V
'ITa)
= EJ (--;:- (1p2 - -;;
'lT )
= (200,000 MPa) (1.14 X 10- m
5 4
)
('IT(2.56 mm»)
1.842 mm
2
1 'lT )
( (1,863 m)2 (1.842 m)2
. VQ (-26.09 kN) (1.61624 X 10-4 m3 )
V= -26.09 kN (-5.87 kips) T = -J 10 5 4
(1.14 X m)
= -370 kN/m (-2.11 kips/in.)
The tension load per unit length of weld (w) is computed from (26) and
(27) as follows:
U ave"
PdRoLcf
=- F - =
(1,034 kPa) (1,879.4 mm)(1,778
(32,029 mm2)
nun) = 10.788 MPa (1565'
. ksl)
2
(0.003794 m ) .
W = Uave,d =-Astj
R
= (107.88 MPa) 18
• 794 m
= 218 kN/m (1.24 kips/m)
o
The net load per unit length of weld (Tweld) of the stiffener is therefore com-
puted from (28):
r
TWeld = Vw 2 + = V(218 kN/mi + (370 kN/mi = 429 kN/m (2.45 kips/m)
Hence, the load per unit length for each weld is 214 kN/m (1.22 kips/in.).
Per the Boiler Code, a fillet weld of 3.2 mm (118 in.) size has a capacity of
280 kN/m (1.6 kips/in.); therefore, a 3.2 mm (l/8 in.) weld would be suffi-
cient. However, the minimum weld size permitted on each side of the stiff-
ener, per the Boiler Code, is 6.4 mm (114 in.).
The foregoing computations were all based on a 15.88 mm (5/8 in.) shell
with ClOX20 channel stiffeners spaced at 1,778 mm (70 in.) centerline spac-
ing. However, this may not be the most economical design. In order to de-
termine the most economical design, many factors must be considered. The
net liner weight alone can be assessed by defining an equivalent thickness
(t.q = FILc/) that represents the thickness of a plain steel liner that weighs the
same as the stiffened liner. Using the same methodology, complete analyses
are made of various shell thickness and stiffener combinations for the design
criteria in this example. Table 3 presents a summary.
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/83
J. Energy Eng. 1998.124:55-89.
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
"-
c...
oC
Jl
o'Tl
m
z
m
Q
m
z
Ci)
TABLE 3. Design Example 3: Suitable Shell ThlcknesslStiffener Combinations
Z t Lei t"'l Per,. Pc".,
m
m [mm (in,)] Stiffener [mm (in.») [mm (in,») [kPa (psi») FS. [kPa (psi») FS.,
Jl
Z (1 ) (2) (3) (4) (5) (6) (7) (8)
Ci)
"-
12,7 (112) ClOX20 1,168 (46) 15.9 (0.626) 1,648 (239) 1.59 1,792 (260) 1.73
o
m
14.3 (9/16) ClOX20 1,448 (57) 16.9 (0.665) 1,662 (241) 1.61 1,778 (258) 1.72
(") 15.9 (5/8) CI0X20 1,778 (70) 18.0 (0.709) 1,676 (243) 1.62 1,748 (253) 1.69
m 19.0 (3/4) C12X25 2,591 (102) 20.8 (0.820) 1,717 (249) 1.66 1,929 (280) 1.87
3: 25.4 (1) None N/A 25.4 (1.000) N/A N/A 1,593 (231) 1.54
OJ
m
...
Jl
<0
<0
(Xl
J. Energy Eng. 1998.124:55-89.
It can be seen that the thinnest shell plate of 12.7 mm (1/2 in.) produces
the lightest section (as denoted by the value of t.q ), although the stiffener
spacing is quite close. A 25.4 mm (1.0 in.) plate will suffice with no stiffeners,
but it weighs 60% more than the section fabricated from the 12.7 mm (1/2
in.) shell plate.
As shown in Table 3, the design for the stiffened liner with 12.7 mm (11
2 in.) shell place uses ClOX20 channels at 1,168 mm (46 in.) centers. The
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
computed values of p cr•ft for free-tube buckling and Pcr"l for single-lobe buck-
ling are 1,648 kPa (239 psi) and 1,792 kPa (260 psi), respectively. With Pd
of 1,034 kPa (150 psi), the factor of safety against free-tube buckling (FSft)
is 1.59, which is 3% higher than the minimum recommended value of 1.54
(i,e., 1.1 X FS s1•mm = 1.1 X 1.4). The factor safety against single-lobe buckling
(FS s1 ) is 1.73, which is 24% higher than the minimum value of 1.4. The
validity of these safety factors is checked as follows.
For the 12.7 mm (112 in.) shell, R o is equal to 1,867 mm (73.49 in.). The
service stress is therefore
PdRo (1.034 MPa) (1.867 m) 152
CJ"d =- t
-= (0.0127 m)
= MPa (22 kSI.) < CJ"alI
= 161 MPa (23.3 ksi)
Checking (23) for single lobe buckling:
PcrRoLc/ (1.792 MPa) (1.867 m)(1.168 m) 210 MP 3 '
CJ"ave.cr = - - F - = (1.168 m)(0.0127 m) + 0.003794 m2 = a ( 0.4 ksl)
= 210 MPa (30.4 ksi)
Therefore, the factor of 1.73 against single-lobe buckling is valid. Checking
the nonessential requirement mentioned earlier for free-tube buckling, per
(19):
Per ftR (1.648 MPa) (1,867 mm)
CJ"cr =- 't -o = (12.7 mm)
= 242 MPa (35 ksi)
> 210 MPa (30.4 ksi)
Therefore, the factor of safety of 1.59 computed for free-tube buckling is not
valid. Using the method illustrated in design example 2, it is determined that,
for this example, the actual safety factor against free-tube buckling is between
1.38 and 1.59. By iteration, it can be shown that the actual factor of safety
is about 1.47.
Review of Shell Stresses in Stiffened Liner with 12.7 mm (112 in.) Shell
Plate. From Young (1989) one can derive equations that closely approxi-
mate the actual load transfer between the stiffener and the steel cylinder at
service conditions, as well as the stress in the shell. For channel stiffeners,
the line load transfer (w) at the two welds at spacing d (i.e., depth of channel)
can be computed using (29). This equation neglects axial restraint in the
cylinder and the effect of adjacent stiffeners. Neglecting the effect of adjacent
stiffeners is valid unless stiffeners are very close to one another. The equation
is simplified by assuming that the axial stress is uniform across the stiffener
cross section, and that all forces and pressures act at the centerline radius of
the cylinder, R:
JOURNAL OF ENERGY ENGINEERING 1 DECEMBER 1998/85
J. Energy Eng. 1998.124:55-89.
(29)
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
where
'1' = 1 +
1/4
_ 3(1 - v 2 )
A- 22 ]
[
Rt
d = distance between the two stiffener connection welds (depth of the chan-
nel); Rsif = radius to the neutral axis of the stiffener; P d = design external
pressure on the shell; t = thickness of the shell; w = line load per stiffener
connection point; and Asif,cp = area of stiffener per connection point (e.g.,
Asif,cp = 0.5A sif for stiffeners with a fillet weld on each side).
For a stiffener connected to the shell via a single connection point (e.g., a
tee stiffener with a groove weld between the stiffener web and the shell), the
value of 'l' should be set to one and Asif,cp should be set to the full stiffener
area (A sif). For channel stiffeners, since there are two connection points per
each channel, Asif,CP should be set to one half of the full stiffener area (A sif).
In addition, for channel stiffeners with depths of 250 mm (10 in.) or more,
the value of'l' is approximately unity. Using v of 0.29, 'l' of 1, and (29),
the line load per each stiffener connection point is approximated as follows:
(30)
w = CtlASt/,cp) +
For the 12.7 mm (112 in.) thick shell in design example 3, d = 254 mm
(10 in.), R = 1,860.4 mm (73.24 in.), P d = 1,034 kPa (150 psi), and A sif =
3,794 mm2 (5.88 in?). Using the more precise equation (29) for w, the fol-
lowing are computed:
_ [ 3[1 - (0.29)2] ]114 _ 8376 m- I
A - (1.8604 m)2(0.0127 mf -.
_ cos[(8.376 m- I )(0.254 m)] + sin[(8.376 m- I )(0.254 m)] _ 1 0
'1' - 1 + e[(8.376 m i)(O.2S4 m)1 - • 38
w = 1,034 kPa/([O.OI27 mm/(0.50)(O.OO3794 m2)]
+ {[I - (O.29)2]114(1.038)/1.52v'(l.8604 m)(0.0127 m)})
= 93.6 kN/m (535 Ib/in.)
Using simplified equation (30) for w:
1,034 kPa )
w = ( [0.0127 m/(0.5)(0.OO3794 m2)] + [l/1.55v'(1.8604 m)(0.0l27 m)]
= 95 kN/m (542 lb/in.)
86/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
By comparing the value of w obtained from the foregoing two equations, it
is seen that (30) yields a slightly (1.5%) higher w than the more accurate
(29).
For comparison, the use of recommended (27) for computing w produces
0.001897 m2
w = 1,034 kPa (1.168 m) 0.0186 m2 = 123 kN/m
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
The value of 123 kN/m (703 lb/in.) is higher than the actual value computed
previously, and the recommended method of computing w in an earlier sec-
tion is shown to be conservative.
Fig. 11 shows a summary of the stresses along the 12.7 mm (112 in.)
cylinder plate, with the stiffener weld point at x = 0 mm. With d of 254 mm
(10 in.) and L of 914 mm (36 in.), x = -127 mm (-5 in.) represents the
midpoint of the channel stiffener, and x = 457 mm (18 in.) represents the
midpoint of the cylinder between stiffeners. The lower curve in Fig. 11 rep-
resents the computed axial tangential stress (without bending), which is min-
imum (91 MPa = 13.2 ksi) near the welds (at x = 0) and maximum (154
MPa = 22.3 ksi) at x = 366 mm (14.4 in.). In reality, tangential (secondary)
-
160 ,-- ,- - ,-- -----
150 - e-- -- -- -
V/ V
140 - - - - f-- - e-- -
,/ / - e-- ---
Ii' II
6 130 - -- c- -
.
z
fl
00 120 f-"'- '-"-' . . . ... .. i"'--' '-" '-"' f--'" • ,,"--""
..•.
r= 110 /1\ _.... _.
... f- - -- -- f--
i'-
I
I
100
90
- 1'\
f-- -
V
I
t'- ..... I
I
-_.-
J Pd
f--
1034 kPa
-
1--
.- -
.. -
f--
80
-125 -75 -25 25 75 125 175 225 275 325 375 425
Distance From Stiffener Connection Point (mm)
-Tangential stress without hending
- - Tangential stress with hending
- - - Tangential stress if stiffeners are ignored
• • • Average tangential stress in the stiffened liner
FIG. 11. Tangential Stress In Stiffened Liner with 12.7 mm (1/2 In.) Shell Plate
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998/87
J. Energy Eng. 1998.124:55-89.
bending stresses occur due to Poisson's effects from the longitudinal bending,
which is highest near the weld points. The upper curve is the maximum
computed axial plus bending stress; it is maximum (156 MPa = 22.6 ksi) at
x = 300 mm (11.8 in.). At the weld points, the computed tangential stress
without bending is 92 MPa (13.5 ksi); this value may also be obtained by
wR (93.6 kN/m) (1.8604 m) .
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
(J' == O.5Asif == 0.001897 m2 == 92 MPa (13.3 ks!)
From design example 3, if the stiffeners are ignored the axial stress in the
12.7 mm (1/2 in.) shell is 152 MPa (22 ksi), which is shown by the upper
horizontal line in Fig. II. The average tangential service stress across the
entire area of the stiffened liner is 121 MPa (17.6 ksi), which is shown by
the lower horizontal line in Fig. II. Longitudinal stresses from bending are
not shown, but are a maximum of 103 MPa (15 ksi) at the weld location.
ACKNOWLEDGMENTS
The writers would like to thank the Metropolitan Water District of Southern California for
the opportunity to acquire the information presented in this paper and for the two photographs
of a liner buckled in a single-lobe mode.
APPENDIX. REFERENCES
Amstutz, E. (1970). "Buckling of pressure-shaft and tunnel linings." Water Power,
22(Nov.), 391-400.
Boiler and pressure vessel code, section VIII-rules for construction of pressure
vessels. (1995). American Society of Mechanical Engineers, New York.
Bo£Ot. (1957). "Aambage d'in cylindre a paroi mince, place dans une enveloppe
rigide et soumi a une pression exterieure." La Houille Blanche, Grenoble, France,
6,231-245.
Donnell, L. H. (1976). Beams, plates and shells. McGraw-Hill, New York.
EI-Sawy, K., and Moore, I. D. (1997). "Parametric study for buckling of liners: Effect
of liner geometry and imperfections." Trenchless pipeline projects-practical ap-
plications, L. E. Osborn, ed., ASCE, Reston, Va., 416-423.
Aiigge, W. (1960). Stresses in shells. Springer, Berlin.
Gaylord, E. H., and Gaylord, C. N. (1972). Design of steel structures. McGraw-Hill,
New York.
Glock, D. (1977). "Oberkritisches verhalten eines starr umrnantelten kreisrohres bei
wasserdruck vos aussen und temperaturdehnung." Der Stahlbau, Berlin, 7, 212-
217.
Jacobsen, S. (1974). "Buckling of circular rings and cylindrical tubes under external
pressure." Water Power, 26(Dec.), 400-407.
Manual of steel construction-allowable stress design. (1991). American Institute of
Steel Construction, Chicago.
Moore, E. T. (1990). "Designing steel tunnel liners for hydro plants." Hydro Rev.,
9(Oct), 72-89.
Southwell, R. V. (1913). "On the general theory of elastic stability." Philosophical
Trans., 213A, 187-244.
Standard specifications for highway bridges. (1992). 15th Ed., American Association
of State Highway Transportation Officials, Washington, D.C.
"Steel penstocks." (1993). ASCE manuals and Rep. on Engrg. Pract. No. 79, New
York.
Timoshenko, S. (1934). Theory of elasticity. McGraw-Hill, New York.
Vaughan, E. W. (1956). "Steel linings for pressure shafts in rock." J. Power Div.,
ASCE, 82, 949-1-949-40.
von Mises, R. (1914). "Der kritische aussendruck zylindrischer rohre." Zeitscrift
V.D.I., 58, 750-755.
88/ JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998
J. Energy Eng. 1998.124:55-89.
Windenburg, D. F., and Trilling, C. (1934). "Collapse by instability of thin cylindrical
shells under external pressure." Reprinted, 1960, Pressure vessel and piping
design-collected papers 1927-1959, American Society of Mechanical Engineers,
New York, 612-624.
Young, W. C. (1989). Roark's fonnulas for stress and strain. McGraw-Hill, New York.
David Berti
Downloaded from ascelibrary.org by New York University on 05/10/15. Copyright ASCE. For personal use only; all rights reserved.
Principal
Jacobs Associates Engineers and Consultants
San Francisco, CA
Richard Stutzman
Director of Marketing
Jeffco Painting and Coatings
Martinez, CA
Formerly, Senior Civil Engineer
Ensign & Buckley Consulting Engineers
Larkspur, CA
Eric Lindquist
Associate
Jacobs Associates Engineers and Consultants
San Francisco, CA
Maryam Eshghipour
Staff Engineer
Jacobs Associates Engineers and Consultants
San Francisco, CA
JOURNAL OF ENERGY ENGINEERING / DECEMBER 1998 /89
J. Energy Eng. 1998.124:55-89.
You might also like
- Rubberdamnew 140214103433 Phpapp02Document24 pagesRubberdamnew 140214103433 Phpapp02Mukhlish AkhatarNo ratings yet
- Strength Analysis of Penstock Bifurcation Hydropower PlantDocument12 pagesStrength Analysis of Penstock Bifurcation Hydropower PlantJenny Cecilia Ureña ZuriNo ratings yet
- MasterSeries 850 Specification SheetDocument2 pagesMasterSeries 850 Specification SheetFEBCONo ratings yet
- Penstocks: Figure: Typical Installaion of PenstocksDocument6 pagesPenstocks: Figure: Typical Installaion of PenstocksTharindu Nuwan JayakodyNo ratings yet
- Gate SealsDocument172 pagesGate SealsIoannis SanoudosNo ratings yet
- HG - Flap - Gates ArmcoDocument20 pagesHG - Flap - Gates ArmcoJorge Alberto Veramendi SilvaNo ratings yet
- High Strength Steels For Hydropowerplants - Conférence Graz Sept2013Document11 pagesHigh Strength Steels For Hydropowerplants - Conférence Graz Sept2013Jonathan ColeNo ratings yet
- Downpull ForceDocument49 pagesDownpull ForceDavid RodriguezNo ratings yet
- Advanced Metallura Y Materials: Al-Mustansiryia University College of Engineering Materials Engineering DepartmentDocument8 pagesAdvanced Metallura Y Materials: Al-Mustansiryia University College of Engineering Materials Engineering DepartmentroseNo ratings yet
- Schleiss - Design of Pressure Relief ValvesDocument10 pagesSchleiss - Design of Pressure Relief ValvesgianniorlatiNo ratings yet
- Mechanics of Solids: Principle Stresses Under A Given LoadingDocument27 pagesMechanics of Solids: Principle Stresses Under A Given LoadingZabid UllahNo ratings yet
- Hydrodynamic Effects During Earthquakes On Dams and Retaining WallsDocument6 pagesHydrodynamic Effects During Earthquakes On Dams and Retaining WallsAndres CaroNo ratings yet
- Fatigue Crack Propagation Analysis of Repaired Pipes With Composite Patch Under Cyclic PressureDocument9 pagesFatigue Crack Propagation Analysis of Repaired Pipes With Composite Patch Under Cyclic PressureAdam StevensonNo ratings yet
- Hydraulic Machines New 2013 Q&A PDFDocument54 pagesHydraulic Machines New 2013 Q&A PDFLakshmiNarayana Adari LuckyNo ratings yet
- Rope Drum Hoist For Overshot Gate PDFDocument12 pagesRope Drum Hoist For Overshot Gate PDFariza15100% (1)
- Steel Piping On Saddle Supports (EN)Document3 pagesSteel Piping On Saddle Supports (EN)casatermNo ratings yet
- Gate Leaf - SIDocument100 pagesGate Leaf - SIbambang satryojatiNo ratings yet
- Trashrack DesignDocument12 pagesTrashrack DesignAnonymous b9DIaPTq6BNo ratings yet
- Atil Bulu - Penstock LectureDocument26 pagesAtil Bulu - Penstock LectureMade Agus BudiarthaNo ratings yet
- Performance Evaluation of An Underground Penstock Bifurcation A Case Study PDFDocument4 pagesPerformance Evaluation of An Underground Penstock Bifurcation A Case Study PDFArjun ThapaNo ratings yet
- Gate Lip HydraulicsDocument7 pagesGate Lip HydraulicsDaniela E. WagnerNo ratings yet
- Prediction of Downpull On Closing High HDocument11 pagesPrediction of Downpull On Closing High HCrimsonPoshNo ratings yet
- Trashrack DesignDocument4 pagesTrashrack DesignpicottNo ratings yet
- Buried Pipe - CalcstressDocument17 pagesBuried Pipe - CalcstressAnjani PrabhakarNo ratings yet
- Water Control Gates TrainingDocument132 pagesWater Control Gates TrainingsaishankarlNo ratings yet
- Wye BranchesDocument8 pagesWye BranchesbarukomkssNo ratings yet
- Chapter 3 PenstocksDocument29 pagesChapter 3 PenstocksmohamedbadawyNo ratings yet
- Critical Buckling EquationDocument18 pagesCritical Buckling Equationxsi666No ratings yet
- 1 Steel Penstock: 1.1 Location and ArrangementDocument7 pages1 Steel Penstock: 1.1 Location and ArrangementDangol RupeshNo ratings yet
- Penstock Presentation - PpsDocument42 pagesPenstock Presentation - PpsGourav KhudasiaNo ratings yet
- Water Power: & Dam ConstructionDocument52 pagesWater Power: & Dam ConstructionpedrogerardohjNo ratings yet
- Buried Steel PenstocksDocument96 pagesBuried Steel PenstocksSantiago Parillo OhaNo ratings yet
- Design Criteria For Exposed Hydro Penstocks - Gordon1978 PDFDocument12 pagesDesign Criteria For Exposed Hydro Penstocks - Gordon1978 PDFDavid DelgadoNo ratings yet
- Report DSO-11-06 - Seismic Induced Loads On Spillway Gates - Literature ReviewDocument40 pagesReport DSO-11-06 - Seismic Induced Loads On Spillway Gates - Literature Reviewchutton681No ratings yet
- Steel Penstocks - 4 Exposed PenstocksDocument40 pagesSteel Penstocks - 4 Exposed Penstocksjulio83% (6)
- Inspection of PenstockDocument9 pagesInspection of PenstockDangol RupeshNo ratings yet
- Buckling of Free Pipe Under External PressureDocument38 pagesBuckling of Free Pipe Under External Pressurevictortownshend100% (1)
- Ebook1183 EbookDocument99 pagesEbook1183 Ebookranendra sarma100% (1)
- Steel Penstocks - 4 Exposed Penstocks PDFDocument40 pagesSteel Penstocks - 4 Exposed Penstocks PDFvmonrroy7450100% (1)
- Fatigue Calculation For Welded Joints of Bearing Elements of Freight Car BogieDocument5 pagesFatigue Calculation For Welded Joints of Bearing Elements of Freight Car Bogiesvk_ntNo ratings yet
- 9 Design of Permanent, Final Linings: EM 1110-2-2901 30 May 97Document32 pages9 Design of Permanent, Final Linings: EM 1110-2-2901 30 May 97Prem Singh RawatNo ratings yet
- Elastic Stresses in Single Mitred BendsDocument22 pagesElastic Stresses in Single Mitred BendsWang Kin HuiNo ratings yet
- Spillway Gate RelibilityDocument5 pagesSpillway Gate RelibilityDheeraj ThakurNo ratings yet
- SpiralWeld - DesignDocument26 pagesSpiralWeld - DesignSH1961100% (1)
- Tyrolean Weir PDFDocument148 pagesTyrolean Weir PDFRex ImperialNo ratings yet
- AISC Design Guide 14 Errata - Staggered Truss Framing Systems PDFDocument6 pagesAISC Design Guide 14 Errata - Staggered Truss Framing Systems PDFFernando Gutiérrez UrzúaNo ratings yet
- Steel Structure ST 37Document11 pagesSteel Structure ST 37aliNo ratings yet
- 16 Screw Hoist For Sluice Gate PDFDocument10 pages16 Screw Hoist For Sluice Gate PDFsamNo ratings yet
- Welded Steel PenstockDocument63 pagesWelded Steel PenstockIfnu Setyadi100% (1)
- Reinforced Design of An Unbonded Flexible Flowline For Shallow WaterDocument8 pagesReinforced Design of An Unbonded Flexible Flowline For Shallow WaterTiara NoviantiNo ratings yet
- 1 s2.0 S0143974X16308112 Main PDFDocument14 pages1 s2.0 S0143974X16308112 Main PDFLUIS ISAAC LEON PARONo ratings yet
- Embedment of Spiral in ConcreteDocument11 pagesEmbedment of Spiral in ConcreteabadittadesseNo ratings yet
- Mechanical & Durability Performance of Precast Tunnel LiningDocument7 pagesMechanical & Durability Performance of Precast Tunnel Liningkomt qaqcNo ratings yet
- JCSR FinDocument39 pagesJCSR FinvictorNo ratings yet
- Durable Steel-Reinforced Concrete Structures For Marine EnvironmentsDocument14 pagesDurable Steel-Reinforced Concrete Structures For Marine EnvironmentscscsNo ratings yet
- Underwatrconstructionijsrr d418Document6 pagesUnderwatrconstructionijsrr d418Omkar TembulkarNo ratings yet
- Humes Concrete Pipe Manual PDFDocument50 pagesHumes Concrete Pipe Manual PDFRadhika VeeralaNo ratings yet
- Prestressed Concrete StructureDocument9 pagesPrestressed Concrete StructurepreetiNo ratings yet
- 2017 Ankur JordanJournalofCivilEngineeringDocument17 pages2017 Ankur JordanJournalofCivilEngineeringUsha EngineeringNo ratings yet
- Piping: For Other Uses, See,, Bagpiping, Or, orDocument4 pagesPiping: For Other Uses, See,, Bagpiping, Or, orHarlon BartolomeNo ratings yet
- Python QRDocument2 pagesPython QRALNo ratings yet
- Ffice Desk White: Instruction ManualDocument6 pagesFfice Desk White: Instruction Manualmmendi84No ratings yet
- Precast Segmental Box Girder Bridges PDFDocument15 pagesPrecast Segmental Box Girder Bridges PDFJoni BarjonoNo ratings yet
- Precast Segmental Box Girder Bridges PDFDocument15 pagesPrecast Segmental Box Girder Bridges PDFJoni BarjonoNo ratings yet
- Cost Esti Mate Classi FI Cati ON System - AS Appli ED I N THE MI NI NG AND MI Neral Processi NG I Ndustri ESDocument7 pagesCost Esti Mate Classi FI Cati ON System - AS Appli ED I N THE MI NI NG AND MI Neral Processi NG I Ndustri ESmmendi84No ratings yet
- Column AsDocument1 pageColumn Asmmendi84No ratings yet
- AU09 SpeakerHandout CP214-1 PDFDocument27 pagesAU09 SpeakerHandout CP214-1 PDFpskmegNo ratings yet
- Case Study On Training and DevelopmentDocument5 pagesCase Study On Training and DevelopmentAakanksha SharanNo ratings yet
- Bamboo Construction: Gourav Yadav Sec. B 14150439Document12 pagesBamboo Construction: Gourav Yadav Sec. B 14150439anuj seth100% (1)
- Pad Footing BS8110Document1 pagePad Footing BS8110Asif BillalNo ratings yet
- Syllabus DiplomaDocument4 pagesSyllabus Diplomashahbaz alamNo ratings yet
- Sentron 3VL (Full)Document114 pagesSentron 3VL (Full)PhuongNo ratings yet
- Roarks Formulas For ExcelDocument26 pagesRoarks Formulas For Exceljoejo_s_hotmailNo ratings yet
- Design and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkDocument19 pagesDesign and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkShubham Bodade100% (1)
- Building Construction Step by Step ProcessDocument7 pagesBuilding Construction Step by Step Processsuman subedi100% (1)
- Production Processes PUF PANELDocument4 pagesProduction Processes PUF PANELTravis Wood100% (1)
- Giáo Trình Cơ Khí-2015 - StudentDocument108 pagesGiáo Trình Cơ Khí-2015 - StudentToàn LêNo ratings yet
- Earthing SystemDocument10 pagesEarthing SystemnishanthaindikaNo ratings yet
- Doc. Ref. R - N - I D P:::: ISB/MSM/CW/01 0: EV O Ssue ATE AGE OFDocument2 pagesDoc. Ref. R - N - I D P:::: ISB/MSM/CW/01 0: EV O Ssue ATE AGE OFPuzzelsProductionNo ratings yet
- Torque-Tension Chart For B7Document1 pageTorque-Tension Chart For B7Ramón C. Silva H.No ratings yet
- Structured Approach vs. Object-Oriented ApproachDocument2 pagesStructured Approach vs. Object-Oriented ApproachAmerulzai SyazaNo ratings yet
- PHD Thesis in Control System EngineeringDocument4 pagesPHD Thesis in Control System Engineeringafktdftdvqtiom100% (2)
- Letter of Introduction To Colliers (KDPL Mall Project) - 118 Dt. 08.06.22Document3 pagesLetter of Introduction To Colliers (KDPL Mall Project) - 118 Dt. 08.06.22bisworupmNo ratings yet
- IFE Level 4 Certificate in Fire Safety: Qualification SpecificationDocument14 pagesIFE Level 4 Certificate in Fire Safety: Qualification Specificationamar100% (1)
- Інженерна психологія у застосуванні до проектування обладнанняDocument752 pagesІнженерна психологія у застосуванні до проектування обладнанняOTO TAKNo ratings yet
- The Automation and Integration of ProducDocument100 pagesThe Automation and Integration of ProducJim GrayNo ratings yet
- Typical Manhole DetailsDocument1 pageTypical Manhole DetailsRamadan Rashad100% (1)
- A Control Method For SVPWM-based STATCOMDocument6 pagesA Control Method For SVPWM-based STATCOMJothsna PraveenaNo ratings yet
- Ansi 16.20Document47 pagesAnsi 16.20Damian0284No ratings yet
- Simpson Strong Tie Catalogue PDFDocument244 pagesSimpson Strong Tie Catalogue PDFJibbs OyawoyeNo ratings yet
- LpsaDocument3 pagesLpsaRui OliveiraNo ratings yet
- Front View Scale: 1:1 Left View Scale: 1:1 Isometric View Scale: 1:1Document1 pageFront View Scale: 1:1 Left View Scale: 1:1 Isometric View Scale: 1:1akashNo ratings yet
- 01 IntroducDocument7 pages01 IntroducKevine KhaledNo ratings yet
- Main Cat R Line TelarcDocument189 pagesMain Cat R Line Telarcvicky_doshi096004No ratings yet
- Emesb-Msa-Mtn-002 MTN CLM R1Document7 pagesEmesb-Msa-Mtn-002 MTN CLM R1Ain TieyNo ratings yet
- Academic General Seat MatrixDocument246 pagesAcademic General Seat Matrixmuthu kumarNo ratings yet