You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Caterpillar EMCPDocument40 pagesCaterpillar EMCPrealwild93% (59)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- GetApplicationAttachment PDFDocument216 pagesGetApplicationAttachment PDFX'mix ĐreamerNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Heui CatDocument27 pagesHeui CatVago Si BeerNo ratings yet
- Control and On-Off Valves GuideDocument87 pagesControl and On-Off Valves Guidebaishakhi_b90100% (3)
- Tech Rider For ShaanDocument7 pagesTech Rider For ShaanSagar Shirole100% (1)
- Timeline of Programming Languages PDFDocument11 pagesTimeline of Programming Languages PDFMohd Khir ZainunNo ratings yet
- Adjust Valve Lash PDFDocument7 pagesAdjust Valve Lash PDFX'mix ĐreamerNo ratings yet
- MineStar Health Connectivity MatrixDocument11 pagesMineStar Health Connectivity MatrixX'mix ĐreamerNo ratings yet
- Gpa 2145Document15 pagesGpa 2145Sergio David Ruiz100% (1)
- Fuels and Heat Power: A Guide to Fuels, Furnaces, and FiringDocument101 pagesFuels and Heat Power: A Guide to Fuels, Furnaces, and FiringAlyssa Clarizze MalaluanNo ratings yet
- IGS NT 2.4 Troubleshooting Guide ADocument39 pagesIGS NT 2.4 Troubleshooting Guide ARicardo Nunes Pereira Junior100% (1)
- IGS NT 2.4 Troubleshooting Guide ADocument39 pagesIGS NT 2.4 Troubleshooting Guide ARicardo Nunes Pereira Junior100% (1)
- p7 Subminiature Pushbuttons Catalog PageDocument3 pagesp7 Subminiature Pushbuttons Catalog PageX'mix ĐreamerNo ratings yet
- Hydraulic Breaker Specification PDFDocument1 pageHydraulic Breaker Specification PDFX'mix ĐreamerNo ratings yet
- Product Knowledge 2 Engine 4JB1: Isuzu Training Center - 1Document14 pagesProduct Knowledge 2 Engine 4JB1: Isuzu Training Center - 1X'mix ĐreamerNo ratings yet
- Spareparts, Service and Technical Supplay ForDocument1 pageSpareparts, Service and Technical Supplay ForX'mix ĐreamerNo ratings yet
- Spareparts, Service and Technical Supplay ForDocument1 pageSpareparts, Service and Technical Supplay ForX'mix ĐreamerNo ratings yet
- Battery SpecsDocument2 pagesBattery SpecsAbraham SaucedoNo ratings yet
- High-voltage NPN transistor spec sheetDocument4 pagesHigh-voltage NPN transistor spec sheetX'mix ĐreamerNo ratings yet
- BdjsjjaDocument10 pagesBdjsjjaX'mix ĐreamerNo ratings yet
- 01 Engine4jb1Document5 pages01 Engine4jb1X'mix ĐreamerNo ratings yet
- Isuzu 4JB1 Engine Product Knowledge GuideDocument14 pagesIsuzu 4JB1 Engine Product Knowledge GuideX'mix ĐreamerNo ratings yet
- Ds Da T en Ma 20171107 HeDocument36 pagesDs Da T en Ma 20171107 HeX'mix ĐreamerNo ratings yet
- DS/DA-T Series: Instruction ManualDocument1 pageDS/DA-T Series: Instruction ManualX'mix ĐreamerNo ratings yet
- Ds Da T en Ma 20171107 HeDocument36 pagesDs Da T en Ma 20171107 HeX'mix ĐreamerNo ratings yet
- DS/DA-T Series: Instruction ManualDocument1 pageDS/DA-T Series: Instruction ManualX'mix ĐreamerNo ratings yet
- DS/DA-T Series: Instruction ManualDocument1 pageDS/DA-T Series: Instruction ManualX'mix ĐreamerNo ratings yet
- DS/DA-T Series: Instruction ManualDocument1 pageDS/DA-T Series: Instruction ManualX'mix ĐreamerNo ratings yet
- EC25C32 32kbits SPI Serial EEPROM: General DescriptionDocument16 pagesEC25C32 32kbits SPI Serial EEPROM: General DescriptionX'mix ĐreamerNo ratings yet
- Honeywell Sensing Temperature Sensors Line Guide 0 1109480Document12 pagesHoneywell Sensing Temperature Sensors Line Guide 0 1109480X'mix ĐreamerNo ratings yet
- Percobaan Penggunaan Multimeter Dan OsiloskopDocument26 pagesPercobaan Penggunaan Multimeter Dan OsiloskopX'mix ĐreamerNo ratings yet
- Sensor Cat BrochureDocument16 pagesSensor Cat Brochuremarioz25No ratings yet
- RM25C32DS 32-Kbit 1.65V Minimum Non-Volatile Serial EEPROM Spi BusDocument36 pagesRM25C32DS 32-Kbit 1.65V Minimum Non-Volatile Serial EEPROM Spi BusX'mix ĐreamerNo ratings yet
- An001 Spi enDocument11 pagesAn001 Spi enX'mix ĐreamerNo ratings yet
- S29CD-J & S29CL-J Flash FamilyDocument76 pagesS29CD-J & S29CL-J Flash FamilyX'mix ĐreamerNo ratings yet
- Bulletin 1395 Digital DC Drive 1350A & 2250ADocument213 pagesBulletin 1395 Digital DC Drive 1350A & 2250ATulioPenaNo ratings yet
- Virginia Transformer - Developments in Traction TransformersDocument10 pagesVirginia Transformer - Developments in Traction TransformersTshepo Sharky SebeNo ratings yet
- Android Car Navigation User ManualDocument74 pagesAndroid Car Navigation User ManualРисте ПановNo ratings yet
- Questionnaire For Future BLICZerDocument1 pageQuestionnaire For Future BLICZerAlejandra GheorghiuNo ratings yet
- Grant Park Platform Bedroom Set Furniture RowDocument1 pageGrant Park Platform Bedroom Set Furniture Rowjyzjz6sr65No ratings yet
- FlowCon General InstructionDocument4 pagesFlowCon General InstructionGabriel Arriagada UsachNo ratings yet
- Designing The Marketing Channels 13Document13 pagesDesigning The Marketing Channels 13Gajender SinghNo ratings yet
- Needle System Guide For Old Industrial Singer Sewing MachinesDocument4 pagesNeedle System Guide For Old Industrial Singer Sewing MachinesWilberth FrancoNo ratings yet
- Module 8 SAHITA ConcreteDocument11 pagesModule 8 SAHITA ConcreteHarrybfnNo ratings yet
- Software Hardware Tech x86 VirtDocument9 pagesSoftware Hardware Tech x86 VirtwyfwongNo ratings yet
- Gsxp07er Opera1tion Manual PDFDocument94 pagesGsxp07er Opera1tion Manual PDFMohamed SaadAllahNo ratings yet
- Dissertation ErsatzteilmanagementDocument7 pagesDissertation ErsatzteilmanagementWriteMyEnglishPaperForMeCanada100% (1)
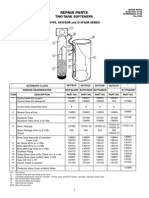
- Star S07FS32DR Water Softener Repair PartsDocument1 pageStar S07FS32DR Water Softener Repair PartsBillNo ratings yet
- Hublit Limphaire Leaflet India PDFDocument2 pagesHublit Limphaire Leaflet India PDFAkshay RaiNo ratings yet
- PET ImagingDocument54 pagesPET ImagingNana AkwaboahNo ratings yet
- Updated After 11th BoS Course Curriculum - B.tech CSEDocument120 pagesUpdated After 11th BoS Course Curriculum - B.tech CSEAnonymous 9etQKwWNo ratings yet
- I) CentrifugesDocument46 pagesI) Centrifugesiahim87No ratings yet
- List of Title-01Document30 pagesList of Title-01najwaNo ratings yet
- DSSSB 01 2017Document9 pagesDSSSB 01 2017Praneeta KatdareNo ratings yet
- GestioIP 3.0 Installation GuideDocument17 pagesGestioIP 3.0 Installation GuidepiterasNo ratings yet
- Methods of Piling ExplainedDocument3 pagesMethods of Piling ExplainedRajesh KhadkaNo ratings yet
- Microstructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic DeformationDocument10 pagesMicrostructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic Deformationsoni180No ratings yet
- Chap1-Geometrical Optics - ExercisesDocument3 pagesChap1-Geometrical Optics - ExercisesReema HlohNo ratings yet
- Breaking Shackles of Time: Print vs Digital ReadingDocument2 pagesBreaking Shackles of Time: Print vs Digital ReadingMargarette RoseNo ratings yet
- How To Unbrick AT&T Galaxy S5 SM-G900A Soft-Brick Fix & Restore To Stock Firmware Guide - GalaxyS5UpdateDocument21 pagesHow To Unbrick AT&T Galaxy S5 SM-G900A Soft-Brick Fix & Restore To Stock Firmware Guide - GalaxyS5UpdateMarce CJ100% (1)