You might also like
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Modelisation Et Simulation Matlab D'Un Kit Retrofit Pour Vehicule Electrique Avec Moteur Sans Balais BLDCDocument36 pagesModelisation Et Simulation Matlab D'Un Kit Retrofit Pour Vehicule Electrique Avec Moteur Sans Balais BLDCUlrich FonkouNo ratings yet
- Analyse Fonctionnelle Solutions ConstrucDocument4 pagesAnalyse Fonctionnelle Solutions ConstrucRobert MartosNo ratings yet
- Commande Des Machines Partie1Document22 pagesCommande Des Machines Partie1Āňtoine GriezmānnNo ratings yet
- Systeme Automatique 2018Document13 pagesSysteme Automatique 2018Habibe-eddine MahmoucheNo ratings yet
- DC2 2 SC2Document3 pagesDC2 2 SC2Adel KmimechNo ratings yet
- G. Pinson - Physique AppliquéeDocument6 pagesG. Pinson - Physique Appliquéetliar0% (1)
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFDocument9 pagesExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukNo ratings yet
- Capteurs Mecanique ProfDocument7 pagesCapteurs Mecanique ProfAbidi YoussefNo ratings yet
- ESC 1 EmbryageDocument2 pagesESC 1 EmbryageHamza Machmoure100% (1)
- Embrayage HydrocinetiqueDocument6 pagesEmbrayage HydrocinetiqueAmine MerwarNo ratings yet
- Manuel Chaines PDFDocument46 pagesManuel Chaines PDFLicitatie CitatiebNo ratings yet
- Compte Rendu TP FAO AvancéeDocument9 pagesCompte Rendu TP FAO AvancéemahdiNo ratings yet
- TPDocument12 pagesTPAhmed AttaouiNo ratings yet
- Avantages Et Inconvenients Des RoulementsDocument7 pagesAvantages Et Inconvenients Des Roulementsprojet5millionNo ratings yet
- Roulement Guidage en RotationDocument6 pagesRoulement Guidage en RotationhajjiNo ratings yet
- Les Liaisons Cinématiques Sur CATIA V5Document37 pagesLes Liaisons Cinématiques Sur CATIA V5abir bzNo ratings yet
- Radio AM PDFDocument6 pagesRadio AM PDFnsiriNo ratings yet
- Cours Poulie CourroieDocument14 pagesCours Poulie CourroieSara Id OalemNo ratings yet
- Stage D'initiationDocument19 pagesStage D'initiationAfifa JridiNo ratings yet
- Système de Récupération de L'énergie Cinétique PDFDocument5 pagesSystème de Récupération de L'énergie Cinétique PDFDODOHICHAMNo ratings yet
- Rapport Projet - Intéger PDFDocument12 pagesRapport Projet - Intéger PDFReda Arif0% (1)
- Rapport Projet s3Document30 pagesRapport Projet s3Nicolas LestradeNo ratings yet
- TP TemporisationDocument6 pagesTP TemporisationfaridNo ratings yet
- TD Percage de PieceDocument1 pageTD Percage de PieceEl Kachani AbderrahmanNo ratings yet
- Eléments de Transmission de MouvementDocument3 pagesEléments de Transmission de MouvementgremdiNo ratings yet
- Introduction À La Fabrication MécaniqueDocument14 pagesIntroduction À La Fabrication MécaniqueAnonymous 9qKdViDP4No ratings yet
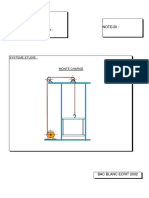
- Monte ChargeDocument10 pagesMonte Chargeyahya zahirNo ratings yet
- MotoréducteursDocument9 pagesMotoréducteursrocceli nzoulouNo ratings yet
- Corrige U11-1Document9 pagesCorrige U11-1Romain MNo ratings yet
- Guidage RotationDocument8 pagesGuidage RotationRouaissi RidhaNo ratings yet
- Grafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesDocument8 pagesGrafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesAFADNo ratings yet
- Calcul D'un Volant D'inertieDocument19 pagesCalcul D'un Volant D'inertieNathan KibilaNo ratings yet
- Sujet Option B 2009Document64 pagesSujet Option B 2009Mohamed Ali TaheurNo ratings yet
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
- Rapport PeugeotDocument39 pagesRapport PeugeotHãĐiR chetouiNo ratings yet
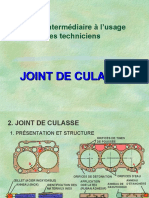
- 4 Joint de CulasseDocument11 pages4 Joint de CulasseBACHIR SANI IchaouNo ratings yet
- Chapitre 4 - P APIDocument12 pagesChapitre 4 - P APIMohammed ALMUSHIAANo ratings yet
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZINo ratings yet
- Activité Semelles ConnectéesDocument7 pagesActivité Semelles Connectéesdahech hichemNo ratings yet
- Mesure de Taux de Compression2Document22 pagesMesure de Taux de Compression2Raouf HarzallahNo ratings yet
- M5 - TD Dynamique de RotationDocument4 pagesM5 - TD Dynamique de RotationkldmntNo ratings yet
- Embrayages Cours PDFDocument2 pagesEmbrayages Cours PDFMohamed LarbiNo ratings yet
- Dimensionnement D Un Systeme D EntrainementDocument11 pagesDimensionnement D Un Systeme D Entrainementmahdi hadhriNo ratings yet
- 10 Alimentation CarburationDocument21 pages10 Alimentation CarburationNorr Mal100% (1)
- CH3 Montage Et Demontage Des Roulements PDFDocument10 pagesCH3 Montage Et Demontage Des Roulements PDFMbaira LeilaNo ratings yet
- Le Moteur Pas A Pas PDFDocument23 pagesLe Moteur Pas A Pas PDFKhaled OuniNo ratings yet
- Les EmbrayagesDocument29 pagesLes EmbrayagesTom Jerry100% (2)
- 4.TP4 - Equilibrage Des MassesDocument12 pages4.TP4 - Equilibrage Des MassesHicham KhalloukiNo ratings yet
- Bouatia TaqiyeddineDocument35 pagesBouatia Taqiyeddinemechtoub sofianeNo ratings yet
- Act (Tour Pinacho - Embrayage) P143-147 PDFDocument5 pagesAct (Tour Pinacho - Embrayage) P143-147 PDFnassim100% (1)
- 9 5 TD 3 Sujet PDFDocument3 pages9 5 TD 3 Sujet PDFMohamed MohamedNo ratings yet
- Leçon2 :structure D'un Systeme Technique ÉlevesDocument10 pagesLeçon2 :structure D'un Systeme Technique ÉlevesSAHBI RABOUDINo ratings yet
- 26 Commandes de FreinDocument32 pages26 Commandes de FreinClément GuérinNo ratings yet
- BourahlaDocument10 pagesBourahlaMark ParaNo ratings yet
- TP SusponstionDocument5 pagesTP SusponstionMokhtari Med Ilyas Chikh0% (1)
- 314 PDFDocument5 pages314 PDFSaidDibNo ratings yet
- Examen Automatique Linéaire 2020 - VFDocument12 pagesExamen Automatique Linéaire 2020 - VFazmohammedamineNo ratings yet
- ChariotDocument8 pagesChariotNoureddine HermetienNo ratings yet
- VibroacoustiqueDocument29 pagesVibroacoustiqueZahi AekNo ratings yet
- 03relaisdeprotectionmoteur 01 14Document14 pages03relaisdeprotectionmoteur 01 14majdoubNo ratings yet
- ParetoDocument3 pagesParetomajdoubNo ratings yet
- Recueil Technique 2007 PDFDocument92 pagesRecueil Technique 2007 PDFmajdoubNo ratings yet
- MS Hyd Hachemi PDFDocument119 pagesMS Hyd Hachemi PDFmajdoubNo ratings yet
- Intro Cours Distribution MACS2 - 2Document100 pagesIntro Cours Distribution MACS2 - 2majdoubNo ratings yet
- Extrait - TECHNIQUE D'INGINIEURDocument138 pagesExtrait - TECHNIQUE D'INGINIEURmajdoubNo ratings yet
- Cours TRANSPORT D'énergie ÉlectriqueDocument15 pagesCours TRANSPORT D'énergie ÉlectriqueJean Daniel Ngoh100% (1)
- Application de L'analyse Vibratoire À La Maintenance Préventive Conditionnelle PDFDocument117 pagesApplication de L'analyse Vibratoire À La Maintenance Préventive Conditionnelle PDFmajdoub100% (5)
- DJEBILI 2013 ArchivageDocument155 pagesDJEBILI 2013 ArchivageAnonymous Zu0p0SWg70% (1)
- TP01-Lancer Un Projet Sur TIA PORTALDocument6 pagesTP01-Lancer Un Projet Sur TIA PORTALmajdoubNo ratings yet
- Modelisation MCC 2015 EleveDocument8 pagesModelisation MCC 2015 ElevemajdoubNo ratings yet
- TP Matlab Machine A Courant Continu Par Armel-Sitou AfanouDocument15 pagesTP Matlab Machine A Courant Continu Par Armel-Sitou Afanouarmel-afanou-793892% (71)
- TP01-Lancer Un Projet Sur TIA PORTALDocument6 pagesTP01-Lancer Un Projet Sur TIA PORTALmajdoubNo ratings yet
- 5.cours MCCDocument2 pages5.cours MCCmajdoubNo ratings yet
- Suspension Active TPDocument6 pagesSuspension Active TPmajdoubNo ratings yet
- Simulation Simulink Des Machines À Courant ContinuDocument14 pagesSimulation Simulink Des Machines À Courant Continuomarah4589% (9)
- TP AdiabatiqueonDocument3 pagesTP AdiabatiqueonmajdoubNo ratings yet
- Chapitre 4Document68 pagesChapitre 4majdoubNo ratings yet
- 5.cours MCCDocument2 pages5.cours MCCmajdoubNo ratings yet
- Matlab GuideDocument21 pagesMatlab GuidemajdoubNo ratings yet
- Cours Complet de SurveillanceDocument57 pagesCours Complet de Surveillancemajdoub67% (3)
- Polycopié ThermodynamiqueDocument149 pagesPolycopié Thermodynamiquemajdoub100% (2)
- Baremes Opcoep Remontees MecaniquesDocument17 pagesBaremes Opcoep Remontees MecaniquesStartup AuchecorneNo ratings yet
- Rapport de StageDocument41 pagesRapport de StageNarada WaldenNo ratings yet
- Cahier - Des - Charges - APS Ouenghi VFDocument35 pagesCahier - Des - Charges - APS Ouenghi VFIssifouHamdaneAdamNo ratings yet
- Voici Les Avantages Les Et InconvenientsDocument2 pagesVoici Les Avantages Les Et Inconvenientshospitabledoctr53No ratings yet
- (RS) Tableau D Bord Un Outil de Pilotage de La Performance - AL OMRANEDocument56 pages(RS) Tableau D Bord Un Outil de Pilotage de La Performance - AL OMRANEoumaima workNo ratings yet
- Cahier Des ChargesDocument4 pagesCahier Des ChargesAbd Rahiim FilaliNo ratings yet
- Merchandising PDFDocument1 pageMerchandising PDFIlhame75% (8)
- Ed6118 Mise en Oeuvre PrémurDocument35 pagesEd6118 Mise en Oeuvre PrémurAM NRNo ratings yet
- Plaquette - ICH - Lyon GrenobleDocument22 pagesPlaquette - ICH - Lyon GrenobleMWNo ratings yet
- SGI 5 - CGF Bourse - Analyse - Septembre 2019Document18 pagesSGI 5 - CGF Bourse - Analyse - Septembre 2019deldiazeNo ratings yet
- MGP7121 Exercice PERT PDFDocument16 pagesMGP7121 Exercice PERT PDFMarwa LahkimNo ratings yet
- Document (1) OignonsDocument6 pagesDocument (1) OignonsLASSIONo ratings yet
- Organigrama INSHSDocument1 pageOrganigrama INSHSlibermeusNo ratings yet
- Ipid MRSQDocument2 pagesIpid MRSQrsn.formationsNo ratings yet
- Anssi Guide Communication Crise CyberDocument56 pagesAnssi Guide Communication Crise CyberjohnNo ratings yet
- 1868 Em25112015 PDFDocument22 pages1868 Em25112015 PDFelmoudjahid_dzNo ratings yet
- Catalogo General Apoyos FammsaDocument48 pagesCatalogo General Apoyos FammsarloayzamariacaNo ratings yet
- STMG MathsDocument7 pagesSTMG MathsAnonymous 9cg4aGsx7JNo ratings yet
- Import Depuis EBPDocument3 pagesImport Depuis EBPMijoro RabemanantsoaNo ratings yet
- SIG InitiationDocument55 pagesSIG InitiationmissaouiNo ratings yet
- Série SILENT-100 DESIGN 3CDocument5 pagesSérie SILENT-100 DESIGN 3CyassineNo ratings yet
- Expose Du Groupe IiiDocument17 pagesExpose Du Groupe IiiabdoulayeNo ratings yet
- LE BUTEUR PDF Du 16/03/2011Document24 pagesLE BUTEUR PDF Du 16/03/2011PDF JournalNo ratings yet
- SAPUTODocument18 pagesSAPUTOmastercssiNo ratings yet
- D - 93 - 609 Modalites Statut Fonction Publique (1993)Document8 pagesD - 93 - 609 Modalites Statut Fonction Publique (1993)SegaAlainCoulibalyNo ratings yet
- PHILIPS - DreamStation BiPAP AVAPSDocument2 pagesPHILIPS - DreamStation BiPAP AVAPSHack clashNo ratings yet
- 2021 Arrêté Par Préfet Le 25.10.2021Document114 pages2021 Arrêté Par Préfet Le 25.10.2021bugnotNo ratings yet
- KACIMI EL HASSANI Mounya PDFDocument72 pagesKACIMI EL HASSANI Mounya PDFmohamed laibNo ratings yet
- Chapitre 2 Application RépartieDocument25 pagesChapitre 2 Application Répartiesafe selmiNo ratings yet
- TDR Art Oratoire 2Document4 pagesTDR Art Oratoire 2Privat AgboNo ratings yet