You might also like
- Laterales Plano 2Document1 pageLaterales Plano 2Jose Migue Osorio TelloNo ratings yet
- Ejercicio de Tornillo de PotenciaDocument8 pagesEjercicio de Tornillo de PotenciaJose Migue Osorio TelloNo ratings yet
- Estadística II - Ficha34!20!2Document1 pageEstadística II - Ficha34!20!2Jose Migue Osorio TelloNo ratings yet
- TapaDocument1 pageTapaJose Migue Osorio TelloNo ratings yet
- Construcción de Un DinamómetroDocument4 pagesConstrucción de Un DinamómetroJose Migue Osorio TelloNo ratings yet
- TrabajoDocument40 pagesTrabajoJose Migue Osorio TelloNo ratings yet
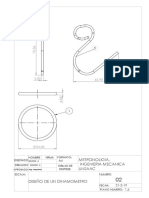
- Gancho de Un DinanometroDocument1 pageGancho de Un DinanometroJose Migue Osorio TelloNo ratings yet
- Elementos Mecanicos FlexiblesDocument50 pagesElementos Mecanicos FlexiblesadolfoclesNo ratings yet
- Nuevos Materiales de ResortesDocument4 pagesNuevos Materiales de ResortesJose Migue Osorio TelloNo ratings yet
- Nuevos en ResortesDocument9 pagesNuevos en ResortesJose Migue Osorio TelloNo ratings yet
- Engranajes Helicodales y ConicosDocument45 pagesEngranajes Helicodales y ConicosMelvin FerNo ratings yet
- Engranajes Helicodales y ConicosDocument45 pagesEngranajes Helicodales y ConicosMelvin FerNo ratings yet
- TolereanciasDocument6 pagesTolereanciasJose Migue Osorio TelloNo ratings yet
- Expo Diseño Pregunta A y BDocument6 pagesExpo Diseño Pregunta A y BJose Migue Osorio TelloNo ratings yet
- Ondas MecánicasDocument4 pagesOndas MecánicasJose Migue Osorio TelloNo ratings yet
- El SonometroDocument17 pagesEl SonometroJose Migue Osorio TelloNo ratings yet
- Impacto Del Proyecto AmbientalDocument83 pagesImpacto Del Proyecto AmbientalJose Migue Osorio Tello100% (1)
- Financiamiento Proyecto de LitioDocument3 pagesFinanciamiento Proyecto de LitioJose Migue Osorio TelloNo ratings yet
- Antecedentes Proyecto de LitioDocument21 pagesAntecedentes Proyecto de LitioJose Migue Osorio Tello100% (3)
- Medidor de CaudalDocument25 pagesMedidor de CaudalJose Migue Osorio TelloNo ratings yet
- Interfer o MetroDocument37 pagesInterfer o MetroedutintaNo ratings yet
- I. La TemperaturaDocument27 pagesI. La TemperaturalenyNo ratings yet
- Term o MetrosDocument13 pagesTerm o MetroslenyNo ratings yet
- Ensayos MecanicosDocument15 pagesEnsayos MecanicoslenyNo ratings yet
- Ergonómia, Diseños Mecánico, Seguridad en El TrabajoDocument15 pagesErgonómia, Diseños Mecánico, Seguridad en El TrabajoJose Migue Osorio TelloNo ratings yet
- 309885758.dureza de Los MaterialesDocument9 pages309885758.dureza de Los MaterialesWillinton Pacori CaceresNo ratings yet
- Bloques PatronDocument28 pagesBloques PatronJose Migue Osorio TelloNo ratings yet
- Informe Practicas ProfesionalesDocument29 pagesInforme Practicas ProfesionalesJose Migue Osorio TelloNo ratings yet
- Sistema de Automatización Neumática en La Avicultura ProyectoDocument14 pagesSistema de Automatización Neumática en La Avicultura ProyectoJose Migue Osorio TelloNo ratings yet
- Planilla Identificacion de Valvulas PSV - 57787Document1 pagePlanilla Identificacion de Valvulas PSV - 57787Inflales Camas Elasticas La PlataNo ratings yet
- Analisis Chanchi-3Document3 pagesAnalisis Chanchi-3David Pelaez GomezNo ratings yet
- Actividad 3. Casos Deformación Plástica de MetalesDocument13 pagesActividad 3. Casos Deformación Plástica de MetalesMarisol ReateguiNo ratings yet
- Fisica Segundo Parcial 2009-IIDocument12 pagesFisica Segundo Parcial 2009-IIJhony renzo Samame coronelNo ratings yet
- LubricanteDocument2 pagesLubricanteYuri Hovadick100% (1)
- Practica Domiciliaria de Fisica TermicaDocument4 pagesPractica Domiciliaria de Fisica TermicaandreNo ratings yet
- Motores Combustion Interna MonografiaDocument19 pagesMotores Combustion Interna MonografiaEdson LeonardoNo ratings yet
- Equipos para Cementacion y EstimulacionDocument33 pagesEquipos para Cementacion y EstimulacionNelsonNo ratings yet
- DinámicaDocument59 pagesDinámicaLeo GarzaNo ratings yet
- EXPO Jumbos FinalDocument43 pagesEXPO Jumbos Finalbladebladi100% (1)
- Secado y PROCTORDocument5 pagesSecado y PROCTORTexy Gacitúa ToroNo ratings yet
- 9173Document4 pages9173i_maca_127168603No ratings yet
- Catalogo de Producto Toyo TIires 2016 DigitalDocument36 pagesCatalogo de Producto Toyo TIires 2016 DigitalMiguel Angel Deagueros Velasco100% (1)
- Procedimiento Instalacion BECDocument45 pagesProcedimiento Instalacion BECLuisSossaNo ratings yet
- Problemas de Fuerza y AceleracionDocument2 pagesProblemas de Fuerza y AceleracionNickiNo ratings yet
- Actividad 10 Analisis EstructuralDocument18 pagesActividad 10 Analisis EstructuralShelly StefhanyNo ratings yet
- Programa de Mantenimiento - Robot 4210 Serie 490701518Document11 pagesPrograma de Mantenimiento - Robot 4210 Serie 490701518Cesar EduardoNo ratings yet
- Capítulo 7 - Movimiento CircularDocument11 pagesCapítulo 7 - Movimiento CircularGoalter PeñaNo ratings yet
- Manual 108 EspañolDocument36 pagesManual 108 EspañolcindyNo ratings yet
- Primer Taller Sistemas TermicosDocument3 pagesPrimer Taller Sistemas TermicosCamilo Jose Ardila PachecoNo ratings yet
- 4-Deflexiones Empleando Metodos de EnergéticosDocument90 pages4-Deflexiones Empleando Metodos de EnergéticosLeonel Prudencio QuiñonesNo ratings yet
- ELECTRODINÁMICADocument3 pagesELECTRODINÁMICAAlessandra LunaNo ratings yet
- WE9950S Manual de Uso e InstalacionDocument44 pagesWE9950S Manual de Uso e Instalacionjosh gellerNo ratings yet
- Presentacion Ley de DarcyDocument56 pagesPresentacion Ley de DarcyJonny AzócarNo ratings yet
- Mecánica de Sólidos Clase 2Document13 pagesMecánica de Sólidos Clase 2Jorge Trejo HuertaNo ratings yet
- Polipastos - DinàmicaDocument2 pagesPolipastos - DinàmicaFabián VargasNo ratings yet
- Capitulo 10 Sección 07 Cojinetes y SellosDocument12 pagesCapitulo 10 Sección 07 Cojinetes y SellosJosue Fernandez MarquezNo ratings yet
- Proyecto 5Document49 pagesProyecto 5rosendo reyes rojasNo ratings yet
- Valvulas Altimetricas BayardDocument44 pagesValvulas Altimetricas BayardHugo de LimaNo ratings yet
- Taller MF Energía y Momentum IDocument2 pagesTaller MF Energía y Momentum IJorge CortinaNo ratings yet