You might also like
- Mrzjw3-Setup154E: General-Purpose AC Servo Servo Configuration SoftwareDocument29 pagesMrzjw3-Setup154E: General-Purpose AC Servo Servo Configuration SoftwareRogério PereiraNo ratings yet
- Apd VS PDFDocument245 pagesApd VS PDFGAURAVNo ratings yet
- GX Developer Version 8 Operating Manual (Special Functions For Overseas) Sh080760engaDocument40 pagesGX Developer Version 8 Operating Manual (Special Functions For Overseas) Sh080760engaLuis NunesNo ratings yet
- UniMAT Servo Set ManualDocument84 pagesUniMAT Servo Set ManualGilberto Figueroa100% (1)
- TSTA User ManualDocument218 pagesTSTA User ManualHieu NguyenNo ratings yet
- Emotron VSB-QSG 01-5578-01r1 English 14x20Document80 pagesEmotron VSB-QSG 01-5578-01r1 English 14x20Lalji LunagariyaNo ratings yet
- Operating Manual (MELSAP-L) Operating ManualDocument86 pagesOperating Manual (MELSAP-L) Operating ManualelvisNo ratings yet
- LadderProg ManualDocument47 pagesLadderProg ManualJeny KissyouNo ratings yet
- VSB ManualDocument166 pagesVSB Manualmukul9040No ratings yet
- PowerFlex 7000 Medium Voltage AC DriveDocument350 pagesPowerFlex 7000 Medium Voltage AC Drivesalmo83:18No ratings yet
- Operating Manual Operating Manual: SW1D5C-RAS-EDocument90 pagesOperating Manual Operating Manual: SW1D5C-RAS-ESubbu Kannappan SrinivasanNo ratings yet
- Omron Inverter 3g3xv SelfeederDocument79 pagesOmron Inverter 3g3xv Selfeedervphongdl100% (1)
- Drive Data Warning Code Mv3000Document473 pagesDrive Data Warning Code Mv3000Jurid Ismailaj100% (1)
- GX Developer Version 8 Operating Manual (MELSAP-L) Sh080375efDocument88 pagesGX Developer Version 8 Operating Manual (MELSAP-L) Sh080375efenriquepm06iNo ratings yet
- User Manual: 1305 Adjustable Frequency AC Drive (Series C)Document170 pagesUser Manual: 1305 Adjustable Frequency AC Drive (Series C)6612poolNo ratings yet
- Mori Server (English)Document201 pagesMori Server (English)phamhoang007No ratings yet
- User Manual (SZGH-X Series) V1.5-UDocument58 pagesUser Manual (SZGH-X Series) V1.5-UDmytroKrNo ratings yet
- Operation ManualDocument15 pagesOperation ManualWagdy BonaaNo ratings yet
- Indramat MT - CNC - Ref - Rev - 10 - 97 PDFDocument354 pagesIndramat MT - CNC - Ref - Rev - 10 - 97 PDFCristopher Entena100% (1)
- Advant Controller 410Document502 pagesAdvant Controller 410cristhian.eduardo99No ratings yet
- ET 200pro FC 28561828 OPI en 0711Document190 pagesET 200pro FC 28561828 OPI en 0711Edson OliveiraNo ratings yet
- Mitsubishi Meldas 600MDocument512 pagesMitsubishi Meldas 600Mratomil75% (4)
- Jsdep SeriesDocument210 pagesJsdep SeriesBill ElectronicNo ratings yet
- I203-E2-02 mcw151 OpermanualDocument276 pagesI203-E2-02 mcw151 OpermanualalhalwaniNo ratings yet
- WEG Ssw04 Soft Starter Manual Br0899.4510 Brochure EnglishDocument101 pagesWEG Ssw04 Soft Starter Manual Br0899.4510 Brochure EnglishSánchez LeticiaNo ratings yet
- DVR2000E Installation Operation Maintenance Manual PDFDocument93 pagesDVR2000E Installation Operation Maintenance Manual PDFGabino Ubilio MurilloNo ratings yet
- QD75M Training ManualDocument390 pagesQD75M Training ManualNguyen QuocNo ratings yet
- Utran: Radio Subsystem Remote Modem Access FD012222A - UMR3.5Document19 pagesUtran: Radio Subsystem Remote Modem Access FD012222A - UMR3.5Anonymous g8YR8b9No ratings yet
- AXOR Manuals 3565Document72 pagesAXOR Manuals 3565Florian CiprianNo ratings yet
- E82MV - 8200motec 0.25-7.5kW Manual - v5-2 - ENDocument270 pagesE82MV - 8200motec 0.25-7.5kW Manual - v5-2 - ENkartogiNo ratings yet
- GE Fanuc Automation: Alpha Series Servo Amplifier UnitDocument73 pagesGE Fanuc Automation: Alpha Series Servo Amplifier UnitXavier TorrasNo ratings yet
- Operating Manual GX Developer 6Document696 pagesOperating Manual GX Developer 6cesare.alcesteNo ratings yet
- NERS Operation Manual V5.5Document43 pagesNERS Operation Manual V5.5Guillermo StiflerNo ratings yet
- SWR700 14 Ee0698Document80 pagesSWR700 14 Ee0698juriNo ratings yet
- Sh080468enge PDFDocument258 pagesSh080468enge PDFJhonney JorgeNo ratings yet
- SZGH - Servo Drive ManualDocument54 pagesSZGH - Servo Drive Manualrichsalgado90% (10)
- Instrument Anritsu Specanalyzer Measure Guide PDFDocument210 pagesInstrument Anritsu Specanalyzer Measure Guide PDFduymanhhusNo ratings yet
- 6-Axis Mach3 Controller With Enternet Interface ManualDocument35 pages6-Axis Mach3 Controller With Enternet Interface Manualabelmil123No ratings yet
- Ladder Program ConverterDocument258 pagesLadder Program Convertermrbundle3129No ratings yet
- Instruction ManualDocument147 pagesInstruction ManualAbid Hossain RupamNo ratings yet
- A03b 0807 c105 Input Module Aid32e1 Fanuc ManualDocument172 pagesA03b 0807 c105 Input Module Aid32e1 Fanuc ManualAlex Carmona0% (2)
- Weg Ssw04 Soft StarterDocument101 pagesWeg Ssw04 Soft StarterClaudio RobertoNo ratings yet
- Upright ManualDocument214 pagesUpright ManualxfvnjhkwrtjNo ratings yet
- 7UM61x Manual PDFDocument424 pages7UM61x Manual PDFJavier Valencia MurilloNo ratings yet
- Manual: MACH3 Ethernet Card NVEMV2Document41 pagesManual: MACH3 Ethernet Card NVEMV2AMIR GHASEMINo ratings yet
- 44zi3vzh RLHDocument120 pages44zi3vzh RLHman wai ChanNo ratings yet
- Vf1402s - g10 - Fa Lust Manual DatasheetDocument85 pagesVf1402s - g10 - Fa Lust Manual DatasheetDarwin MontillaNo ratings yet
- Manual: MACH3 Ethernet Card NVEMDocument41 pagesManual: MACH3 Ethernet Card NVEMLuis Otavio TrindadeNo ratings yet
- Alarm Parameter ManualDocument459 pagesAlarm Parameter ManualDenise Roper50% (2)
- BNP b2267 (Eng) CDocument317 pagesBNP b2267 (Eng) CibraheemNo ratings yet
- ICS 3.5 Serial Manager ManualDocument10 pagesICS 3.5 Serial Manager ManualCarlos HernándezNo ratings yet
- NS-Series Programmable Terminals: Operation ManualDocument65 pagesNS-Series Programmable Terminals: Operation ManualPasha BarNo ratings yet
- Startup HandbookDocument274 pagesStartup Handbookedgard_gonzález_3No ratings yet
- File 314 1241Document858 pagesFile 314 1241bigboss1017067No ratings yet
- 64113EN1Document1,224 pages64113EN1João Paulo Moreira Santos BarbosaNo ratings yet
- Software Operational Manual: Hybrid Servo Drive HBS57/86/86HDocument25 pagesSoftware Operational Manual: Hybrid Servo Drive HBS57/86/86Hhuutan12345No ratings yet
- Adjustable Frequency AC Drive: FRN 1.xxDocument114 pagesAdjustable Frequency AC Drive: FRN 1.xxslavaphilNo ratings yet
- 7ST6xx Manual A6 V4.60 enDocument346 pages7ST6xx Manual A6 V4.60 enNinov CotyNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- IA 05 Formal MethodsDocument5 pagesIA 05 Formal MethodsAuthierlys DomingosNo ratings yet
- Chapter 07Document16 pagesChapter 07Elmarie RecorbaNo ratings yet
- FhryhfhfhDocument3 pagesFhryhfhfhAffan AhmadNo ratings yet
- Teaching Mathematics Content Through Explicit TeachingDocument39 pagesTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- Cultural Practices of India Which Is Adopted by ScienceDocument2 pagesCultural Practices of India Which Is Adopted by ScienceLevina Mary binuNo ratings yet
- The Practice Book - Doing Passivation ProcessDocument22 pagesThe Practice Book - Doing Passivation ProcessNikos VrettakosNo ratings yet
- The Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeDocument10 pagesThe Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeRaghvendra kNo ratings yet
- DC Motor: F Bli NewtonDocument35 pagesDC Motor: F Bli NewtonMuhammad TausiqueNo ratings yet
- Course Outline Principles of MarketingDocument3 pagesCourse Outline Principles of MarketingKhate Tria De LeonNo ratings yet
- Creative LibrarianDocument13 pagesCreative LibrarianulorNo ratings yet
- Introduction To The Iceberg ModelDocument5 pagesIntroduction To The Iceberg ModelAbhay Tiwari100% (1)
- Num Sheet 1Document1 pageNum Sheet 1Abinash MohantyNo ratings yet
- Spelling Grammar Punctuation: Teacher BookDocument8 pagesSpelling Grammar Punctuation: Teacher BookNeil MenezesNo ratings yet
- ARCASIA Students Design Competition TORDocument4 pagesARCASIA Students Design Competition TORDeena McgeeNo ratings yet
- TIB Bwpluginrestjson 2.1.0 ReadmeDocument2 pagesTIB Bwpluginrestjson 2.1.0 ReadmemarcmariehenriNo ratings yet
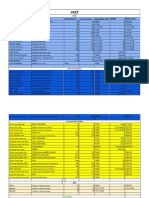
- Jazz PrepaidDocument4 pagesJazz PrepaidHoney BunnyNo ratings yet
- Handbook+for+Participants+ +GCC+TeenDocument59 pagesHandbook+for+Participants+ +GCC+Teenchloe.2021164No ratings yet
- Frequency Polygons pdf3Document7 pagesFrequency Polygons pdf3Nevine El shendidyNo ratings yet
- 2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessDocument11 pages2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessOne PlusNo ratings yet
- WallthicknessDocument1 pageWallthicknessGabriela MotaNo ratings yet
- Risk Assessment For Harmonic Measurement Study ProcedureDocument13 pagesRisk Assessment For Harmonic Measurement Study ProcedureAnandu AshokanNo ratings yet
- Electric PotentialDocument26 pagesElectric PotentialGlitchNo ratings yet
- Electronics 12 00811Document11 pagesElectronics 12 00811Amber MishraNo ratings yet
- 2SA1016Document4 pages2SA1016catalina maryNo ratings yet
- Abstract Cohort 1 Clin Psych FZ 20220323Document31 pagesAbstract Cohort 1 Clin Psych FZ 20220323Azizah OthmanNo ratings yet
- Lecture 11 - Performance AppraisalsDocument23 pagesLecture 11 - Performance AppraisalsCard CardNo ratings yet
- AT ChapIDocument48 pagesAT ChapIvigneshwaranbeNo ratings yet
- Tree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPDocument109 pagesTree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPJulio Davalos Vasquez100% (1)
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDocument1 pageClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesNo ratings yet
- Science, Technology and Society Module #1Document13 pagesScience, Technology and Society Module #1Brent Alfred Yongco67% (6)