You might also like
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Department of MathematicsDocument4 pagesDepartment of MathematicsMadhu Sudhan TNo ratings yet
- MATH2352 Differential Equations and Applications Name: Coursework 6 ID: Problem 1. Solve The IVP (X (T) X 5y y (T) X 3y For X (0) 1, y (0) 1Document2 pagesMATH2352 Differential Equations and Applications Name: Coursework 6 ID: Problem 1. Solve The IVP (X (T) X 5y y (T) X 3y For X (0) 1, y (0) 1John ChanNo ratings yet
- Exp 4ADocument6 pagesExp 4AHemanth HemuNo ratings yet
- Exercises For Signals and Systems (Part Four)Document3 pagesExercises For Signals and Systems (Part Four)Vincent YuchiNo ratings yet
- Math 677. Fall 2009. Homework #1 SolutionsDocument3 pagesMath 677. Fall 2009. Homework #1 SolutionsRodrigo KostaNo ratings yet
- Sys SolDocument9 pagesSys SolNANA NANANo ratings yet
- Chapter 6Document48 pagesChapter 6Cristian LopezNo ratings yet
- ECE 301: Signals and Systems Homework Assignment #3: Professor: Aly El Gamal TA: Xianglun MaoDocument9 pagesECE 301: Signals and Systems Homework Assignment #3: Professor: Aly El Gamal TA: Xianglun Maolakshitha srimalNo ratings yet
- System of First Order Differential EquationsDocument24 pagesSystem of First Order Differential EquationsKaniel OutisNo ratings yet
- HWsets-2011 2Document13 pagesHWsets-2011 2salimNo ratings yet
- Mat334 TD7Document5 pagesMat334 TD7jethrotabueNo ratings yet
- Quiz 4 SolutionsDocument8 pagesQuiz 4 Solutionsharsh gargNo ratings yet
- NLSC Sol Chp2v2Document6 pagesNLSC Sol Chp2v2Jennifer GonzalezNo ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Problem Sheet 2Document2 pagesProblem Sheet 2Ashna JoseNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- 2019 Answers PDFDocument56 pages2019 Answers PDFNitya Pooja ReddyNo ratings yet
- IDocument7 pagesIfelix.fiee2018No ratings yet
- SC 625 Tutorial 3Document1 pageSC 625 Tutorial 3Neils BohrNo ratings yet
- Discrete Time Control Systems Unit 5Document23 pagesDiscrete Time Control Systems Unit 5kishan guptaNo ratings yet
- 4-State Space SolutionsDocument42 pages4-State Space SolutionsMd Nur-A-Adam DonyNo ratings yet
- Homework Set #4: EE6412: Optimal Control January - May 2023Document5 pagesHomework Set #4: EE6412: Optimal Control January - May 2023kapali123No ratings yet
- Tutorial 2 - Systems (Exercises)Document3 pagesTutorial 2 - Systems (Exercises)LEIDYDANNYTSNo ratings yet
- Math 677. Fall 2009. Homework #2 Solutions.: 1, 2 1 1 3, 4 2 2 1, 2 1, 2 1, 2 1 T 1 T 2 T 2 TDocument2 pagesMath 677. Fall 2009. Homework #2 Solutions.: 1, 2 1 1 3, 4 2 2 1, 2 1, 2 1, 2 1 T 1 T 2 T 2 TRodrigo KostaNo ratings yet
- E y X y e y X X: Differential Equations '15 - FinalDocument3 pagesE y X y e y X X: Differential Equations '15 - Final陳浚維No ratings yet
- Signal ProblemsDocument15 pagesSignal ProblemsLaksh DoshiNo ratings yet
- WEEK1 RevisionDocument21 pagesWEEK1 RevisionMOHD ENDRA SHAFIQNo ratings yet
- ACS AssignmentDocument7 pagesACS AssignmentKiruba KaranNo ratings yet
- Fiesta 29 SolutionsDocument2 pagesFiesta 29 SolutionsteachopensourceNo ratings yet
- ECE 301: Signals and Systems Homework Assignment #5: Professor: Aly El Gamal TA: Xianglun MaoDocument10 pagesECE 301: Signals and Systems Homework Assignment #5: Professor: Aly El Gamal TA: Xianglun MaosowNo ratings yet
- Control Systems Theory and Design: Problem 1Document4 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Solutions Ht2009Document6 pagesSolutions Ht2009Kibet ElishaNo ratings yet
- State Space StabilityDocument4 pagesState Space Stabilitymailme4121No ratings yet
- Ese562 Lect01Document35 pagesEse562 Lect01ashralph7No ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Exercises For Signals and Systems (Part Two)Document4 pagesExercises For Signals and Systems (Part Two)Vincent YuchiNo ratings yet
- State Space ExamplesDocument9 pagesState Space ExamplesLumi_Kahlout_4652No ratings yet
- Assignment1 SolutionDocument16 pagesAssignment1 Solutiondagani ranisamyukthaNo ratings yet
- Practice Problems Chapter 6 and 7 I. Laplace Transform: F T T U TDocument6 pagesPractice Problems Chapter 6 and 7 I. Laplace Transform: F T T U TMahmoud I. MahmoudNo ratings yet
- Qdoc - Tips Ece633f09hw2solutionsDocument13 pagesQdoc - Tips Ece633f09hw2solutionsTrần Trọng TiếnNo ratings yet
- Summative Paper 2021Document11 pagesSummative Paper 2021Muavha MadembeNo ratings yet
- 436-405 Advanced Control Systems: Page 1 of 7Document6 pages436-405 Advanced Control Systems: Page 1 of 7aungwinnaingNo ratings yet
- Modern Control4Document20 pagesModern Control4Prasann KatiyarNo ratings yet
- Chapter 2. Linear Systems: Lecture Notes For MA2327Document50 pagesChapter 2. Linear Systems: Lecture Notes For MA2327Santiago Garrido BullónNo ratings yet
- Y LN (X 1 x+1: Example 1 SolutionDocument4 pagesY LN (X 1 x+1: Example 1 SolutionHin Wa LeungNo ratings yet
- ASEN5022 HW04 2004 SolDocument9 pagesASEN5022 HW04 2004 Solrfvz6sNo ratings yet
- A Sequence of Appell Polynomials and The AssociateDocument14 pagesA Sequence of Appell Polynomials and The AssociateAnkitNo ratings yet
- 06 Ex Linear SystemsDocument8 pages06 Ex Linear Systemsraafet slimenNo ratings yet
- Differential Equations '14 - Final: e e e e TDocument4 pagesDifferential Equations '14 - Final: e e e e T陳浚維No ratings yet
- 09 Golnaraghi App I I-1-I-2Document2 pages09 Golnaraghi App I I-1-I-2Adam KhanNo ratings yet
- ELEG 3124 Assignment # 1Document16 pagesELEG 3124 Assignment # 1Nguyễn Văn ĐứcNo ratings yet
- 2011-05 Sisomimo Design ExamplesDocument14 pages2011-05 Sisomimo Design ExamplesArundhati ChaudhariNo ratings yet
- Assign1 2020Document4 pagesAssign1 2020Zulqarnain KhanNo ratings yet
- Tutorial 1Document2 pagesTutorial 1HarshaNo ratings yet
- Key - Maths - and - Physics - Notes (Jan24)Document5 pagesKey - Maths - and - Physics - Notes (Jan24)yunki.yauNo ratings yet
- DMRC EE P1 2016 Watermark - PDF 77Document10 pagesDMRC EE P1 2016 Watermark - PDF 77Nitin MauryaNo ratings yet
- AnalogDocument42 pagesAnalogNitin MauryaNo ratings yet
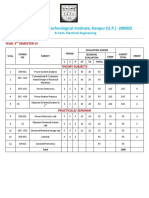
- Harcourt Butler Technological Institute, Kanpur (U.P.) - 208002Document1 pageHarcourt Butler Technological Institute, Kanpur (U.P.) - 208002Nitin MauryaNo ratings yet
- Oops SyllabusDocument1 pageOops SyllabusNitin MauryaNo ratings yet
- Emi K-NotesDocument33 pagesEmi K-NotesAkashGauravNo ratings yet
- Emi K-NotesDocument33 pagesEmi K-NotesAkashGauravNo ratings yet
- 7th Sem Syllabus PDFDocument3 pages7th Sem Syllabus PDFNitin MauryaNo ratings yet
- MeasurementDocument17 pagesMeasurementNitin MauryaNo ratings yet
- Full Tcs Placement Paper With Answers (WWW - Students3k.com)Document10 pagesFull Tcs Placement Paper With Answers (WWW - Students3k.com)danishkumarkangotraNo ratings yet
- Full Tcs Placement Paper With Answers (WWW - Students3k.com)Document3 pagesFull Tcs Placement Paper With Answers (WWW - Students3k.com)Nitin MauryaNo ratings yet
- Objective Questions or MCQ On Transformer For Electrical Engineering - Electricalnotes4uDocument11 pagesObjective Questions or MCQ On Transformer For Electrical Engineering - Electricalnotes4uNitin Maurya100% (1)
- Transmission and Distribution For Electrical Engineering - Electricalnotes4uDocument10 pagesTransmission and Distribution For Electrical Engineering - Electricalnotes4uNitin Maurya100% (1)
- Conic Sections PDFDocument2 pagesConic Sections PDFNitin MauryaNo ratings yet
- Factors Affecting Inductance - Inductors - Electronics Textbook PDFDocument9 pagesFactors Affecting Inductance - Inductors - Electronics Textbook PDFNitin MauryaNo ratings yet
- TdepDocument26 pagesTdepNitin Maurya75% (4)
- Mcqs Preparation For Engineering Competitive ExamsDocument27 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaNo ratings yet
- Mcqs Preparation For Engineering Competitive ExamsDocument20 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaNo ratings yet
- 7th Sem Syllabus PDFDocument3 pages7th Sem Syllabus PDFNitin MauryaNo ratings yet
- 6th Sem SyllabusDocument7 pages6th Sem SyllabusNitin MauryaNo ratings yet
- Mcqs Preparation For Engineering Competitive ExamsDocument27 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaNo ratings yet
- 1 PH Motor MCQDocument28 pages1 PH Motor MCQNitin MauryaNo ratings yet
- Mcqs Preparation For Engineering Competitive ExamsDocument31 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaNo ratings yet
- Mcqs Preparation For Engineering Competitive ExamsDocument25 pagesMcqs Preparation For Engineering Competitive ExamsNitin MauryaNo ratings yet
- PSPDocument1 pagePSPNitin MauryaNo ratings yet
- 05 ProberrDocument7 pages05 Proberrmah1954No ratings yet
- Harcourt Butler Technological Institute, Kanpur (U.P.) - 208002Document1 pageHarcourt Butler Technological Institute, Kanpur (U.P.) - 208002Nitin MauryaNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- DefinitionDocument17 pagesDefinitionakshayaecNo ratings yet
- Talk - Is Management A Science or An Art - WikiversityDocument4 pagesTalk - Is Management A Science or An Art - WikiversityNitin MauryaNo ratings yet
- Bubble Sort Insertion Sort Selection SortDocument21 pagesBubble Sort Insertion Sort Selection SortSaloniNo ratings yet
- Basic Interview Q's On ML PDFDocument243 pagesBasic Interview Q's On ML PDFsourajit roy chowdhury100% (2)
- A Unified Approach To Interpreting Model PredictionsDocument9 pagesA Unified Approach To Interpreting Model PredictionsMinh Anh NguyenNo ratings yet
- 07 Hierarchical ClusteringDocument19 pages07 Hierarchical ClusteringOussama D. OtakuNo ratings yet
- Simulation With Eviews: Swan'S Model: T T 1 T T T 1 T T T T T T T T 1 1Document6 pagesSimulation With Eviews: Swan'S Model: T T 1 T T T 1 T T T T T T T T 1 1KenssyNo ratings yet
- AdaBoostExample PDFDocument2 pagesAdaBoostExample PDFchongj2No ratings yet
- Midterm 2Document5 pagesMidterm 2vswl vienne100% (1)
- Hybrid SystemsDocument5 pagesHybrid Systemsjyoti singhNo ratings yet
- Classification of Lung Cancer Detection Using Convolution Neural Network (CNN)Document11 pagesClassification of Lung Cancer Detection Using Convolution Neural Network (CNN)dataprodcsNo ratings yet
- Mva Analysis of VBS, GGZZ and Qqzz1J ProcessesDocument23 pagesMva Analysis of VBS, GGZZ and Qqzz1J ProcessesDujeGiljanovićNo ratings yet
- Number 3 Compiler Design CourseworkDocument3 pagesNumber 3 Compiler Design Courseworkiriama emmaNo ratings yet
- Matlab Control UGDocument1,440 pagesMatlab Control UGLukiniNo ratings yet
- 5 MulticolinearityDocument26 pages5 Multicolinearitysaadullah98.sk.skNo ratings yet
- ECON3049 Lecture Notes 1Document32 pagesECON3049 Lecture Notes 1Kimona PrescottNo ratings yet
- Numerical Analysis: MATLAB Practical (Autumn 2020) B.E. III Semester Thapar Institute of Engineering & Technology PatialaDocument6 pagesNumerical Analysis: MATLAB Practical (Autumn 2020) B.E. III Semester Thapar Institute of Engineering & Technology PatialaAarohan VermaNo ratings yet
- An Interpolation-Free Two-Dimensional Conservative ALE Scheme Over Adaptive Unstructured Grids For Rotorcraft AerodynamicsDocument171 pagesAn Interpolation-Free Two-Dimensional Conservative ALE Scheme Over Adaptive Unstructured Grids For Rotorcraft AerodynamicsBucky83No ratings yet
- Deep Learning - Ian GoodfellowDocument789 pagesDeep Learning - Ian GoodfellowAshwinikumar PatilNo ratings yet
- Data Science Gabarito 4 Da Universidade de HarvardDocument5 pagesData Science Gabarito 4 Da Universidade de HarvardNP PlanaltimNo ratings yet
- Lsopt 50 ManualDocument705 pagesLsopt 50 ManualwondwosenAyeleNo ratings yet
- Division of Polynomials ExercisesDocument4 pagesDivision of Polynomials ExercisesKhang NguyễnNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument15 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- 2022 01 06 LECTURE 9 ModelingAndCurrentControlDocument62 pages2022 01 06 LECTURE 9 ModelingAndCurrentControlYves DuforezNo ratings yet
- j2020 A Survey of The Usages of Deep Learning For Natural Language ProcessingDocument21 pagesj2020 A Survey of The Usages of Deep Learning For Natural Language ProcessingChan ThaiNo ratings yet
- Analysis of Direction of Arrival Estimation in Circular Arrays Using Music and Esprit AlgorithmsDocument30 pagesAnalysis of Direction of Arrival Estimation in Circular Arrays Using Music and Esprit Algorithmstteja28042002No ratings yet
- NIS IMP QuestionsDocument4 pagesNIS IMP QuestionsAbhijit chavanNo ratings yet
- UE21CS342AA2 - Unit-1 Part - 2Document110 pagesUE21CS342AA2 - Unit-1 Part - 2abhay spamNo ratings yet
- Assignment 2: Markov ChainDocument1 pageAssignment 2: Markov ChainAimaan SharifaNo ratings yet
- Bairstow MethodDocument15 pagesBairstow MethodBahang DiwantaNo ratings yet
- Syllabus - App LabDocument1 pageSyllabus - App LabSunita MouryaNo ratings yet
- IJEST Special Issue CompleteDocument208 pagesIJEST Special Issue CompleteUkemebookieNo ratings yet