You might also like
- Lecture On Fuzzy Logic ControlDocument87 pagesLecture On Fuzzy Logic ControlHEMANT KUMARNo ratings yet
- Lec 9Document74 pagesLec 9Akram TaNo ratings yet
- Fuzzy LogicDocument149 pagesFuzzy LogicUddalak Banerjee100% (1)
- Model Predictive Control History and DevelopmentDocument3 pagesModel Predictive Control History and DevelopmentcreadorcitoNo ratings yet
- Deep Learning For Image Processing Using MATLABDocument19 pagesDeep Learning For Image Processing Using MATLABNetaji GandiNo ratings yet
- Fuzzy LogicDocument42 pagesFuzzy LogicShivan BiradarNo ratings yet
- Fuzzy Logic ExamplesDocument59 pagesFuzzy Logic ExamplesGeorge IskanderNo ratings yet
- Numerical Methods DynamicsDocument16 pagesNumerical Methods DynamicsZaeem KhanNo ratings yet
- Temperature Control and Adaptive Fuzzy SystemsDocument11 pagesTemperature Control and Adaptive Fuzzy Systemssaranya rNo ratings yet
- Reinforcement LearningDocument46 pagesReinforcement LearningShagunNo ratings yet
- Fuzzy Logic ExampleDocument4 pagesFuzzy Logic ExampleTri AwanNo ratings yet
- Neuro-Fuzzy Controller For Control and RoboticsDocument13 pagesNeuro-Fuzzy Controller For Control and Roboticssyed mazhar aliNo ratings yet
- Fuzzy Logic Implementation Using MATLABDocument40 pagesFuzzy Logic Implementation Using MATLABMuruganandam Masilamani100% (1)
- Tuning of Fuzzy Logic Controller Using Genetic AlgorithmDocument19 pagesTuning of Fuzzy Logic Controller Using Genetic AlgorithmAwadalla TaifourNo ratings yet
- Control Systems - From Mathematical Modelling To PID Control - Online Engineering CoursesDocument1 pageControl Systems - From Mathematical Modelling To PID Control - Online Engineering CoursesMohamed AlkharashyNo ratings yet
- FuzzyDocument343 pagesFuzzyHardik AgravattNo ratings yet
- Fuzzy LogicDocument47 pagesFuzzy LogicSubhashini jayaseelanNo ratings yet
- Course: In'FuzzyDocument220 pagesCourse: In'FuzzyYuliya ZverevaNo ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- Fuzzy Logic ControllerDocument7 pagesFuzzy Logic ControllermeenaNo ratings yet
- FuzzyDocument135 pagesFuzzyأحمد كرارNo ratings yet
- Model-Reference Adaptive Control: Nhan T. NguyenDocument453 pagesModel-Reference Adaptive Control: Nhan T. NguyenName24122021No ratings yet
- Fuzzy Logic Controller DesignDocument46 pagesFuzzy Logic Controller Designcleiton_ctbaNo ratings yet
- Module 2 - Fuzzy Rules and Fuzzy InferencingDocument51 pagesModule 2 - Fuzzy Rules and Fuzzy InferencingAniket MandalNo ratings yet
- SPC318: System Modeling and Linear SystemsDocument43 pagesSPC318: System Modeling and Linear SystemsAtanuMajiNo ratings yet
- NP-Hard and NP-CompleteDocument13 pagesNP-Hard and NP-CompletemathuNo ratings yet
- RBFN Xor ProblemDocument16 pagesRBFN Xor ProblemCory SparksNo ratings yet
- Automatic Tuning and Adaptation For Pid Controllers - A SurveyDocument16 pagesAutomatic Tuning and Adaptation For Pid Controllers - A SurveyTwistiesFifie FafauNo ratings yet
- Fuzzy and Nural Approaches in Engineering Matlab SupplimentDocument218 pagesFuzzy and Nural Approaches in Engineering Matlab SupplimentKirtesh Tiwari100% (1)
- Fuzzy LogicDocument39 pagesFuzzy Logicvlucknow100% (4)
- Understanding of A Convolutional Neural NetworkDocument6 pagesUnderstanding of A Convolutional Neural NetworkJavier BushNo ratings yet
- XOR Problem Demonstration Using MATLABDocument19 pagesXOR Problem Demonstration Using MATLABal-amin shohag0% (1)
- Fuzzy Logic ControllerDocument4 pagesFuzzy Logic ControllerSalma KhanNo ratings yet
- Fuzzy Logic and It's ApplicationsDocument21 pagesFuzzy Logic and It's Applicationskiran_wakchaureNo ratings yet
- A Course in Fuzzy Systems and ControlDocument441 pagesA Course in Fuzzy Systems and ControlTrAvEsSo84100% (9)
- Principal Component Analysis (PCA) in Machine LearningDocument20 pagesPrincipal Component Analysis (PCA) in Machine LearningMs Sushma BNo ratings yet
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemNo ratings yet
- Control Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignDocument19 pagesControl Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignJhonNo ratings yet
- Week6 Matlab Fuzzy ExamplesDocument17 pagesWeek6 Matlab Fuzzy Examplesmekatronik_05No ratings yet
- Numerical Computation and Optimization: Solution of Ordinary Differential EquationsDocument16 pagesNumerical Computation and Optimization: Solution of Ordinary Differential Equationsstart lordNo ratings yet
- Firefly AlgorithmDocument14 pagesFirefly AlgorithmSukun TarachandaniNo ratings yet
- Feedback Control Problems Using Matlab and The Control System Toolbox PDFDocument2 pagesFeedback Control Problems Using Matlab and The Control System Toolbox PDFPaulNo ratings yet
- Fuzzy Logic With Real-Time ApplicationsDocument18 pagesFuzzy Logic With Real-Time ApplicationskdeepanrajNo ratings yet
- Matlab Tutorial5Document50 pagesMatlab Tutorial5Asterix100% (8)
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverNo ratings yet
- Mamdani SugenoDocument34 pagesMamdani SugenoNoormalita Irviana100% (1)
- Dynamics of StructuresDocument2 pagesDynamics of StructuresBOKO-HAYA D. DidierNo ratings yet
- Fuzzy SetDocument43 pagesFuzzy Setnoor aliNo ratings yet
- SCT Unit 3 SCTDocument18 pagesSCT Unit 3 SCTPavan GuttaNo ratings yet
- Microsoft PowerPoint - Fuzzy Lecture-01.Ppt (Compatibility Mode)Document61 pagesMicrosoft PowerPoint - Fuzzy Lecture-01.Ppt (Compatibility Mode)Ahmed Alzaidi100% (1)
- Fuzzy Logic: Chapter-5Document43 pagesFuzzy Logic: Chapter-5sohamNo ratings yet
- 13 Fuzzy Logic IntroDocument73 pages13 Fuzzy Logic IntroMuh. ILHAM. Hasby. HNo ratings yet
- Fuzzy LogicDocument62 pagesFuzzy Logicmanoj pandeyNo ratings yet
- Unit 3 Introduction To Fuzzy System: StructureDocument22 pagesUnit 3 Introduction To Fuzzy System: StructurePOTHU LOKESHNo ratings yet
- Fuzzy SetDocument13 pagesFuzzy SetSoumya PaikNo ratings yet
- Iiitmj FS NPP PDFDocument43 pagesIiitmj FS NPP PDFsohamNo ratings yet
- Fuzzy Sets 2Document17 pagesFuzzy Sets 2Beeshal NepalNo ratings yet
- Basic DefinitionsDocument15 pagesBasic DefinitionsHerald RufusNo ratings yet
- Fuzzy Logic-HIAST-5th-YearDocument83 pagesFuzzy Logic-HIAST-5th-Yearriadakaad2002No ratings yet
- Software RETScreenDocument45 pagesSoftware RETScreenkhalidNo ratings yet
- Sustainability 13 05878Document15 pagesSustainability 13 05878khalidNo ratings yet
- ARE - 510 - 6 - Programming and LanguagesDocument31 pagesARE - 510 - 6 - Programming and LanguageskhalidNo ratings yet
- Are 510 7 KbesDocument51 pagesAre 510 7 KbeskhalidNo ratings yet
- Energies 13 06269 v2Document41 pagesEnergies 13 06269 v2Nurulazmi Bin Abd RahmanNo ratings yet
- Hybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategyDocument6 pagesHybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategykhalidNo ratings yet
- ARE - 510 - 3 - Specialized ApplicationDocument33 pagesARE - 510 - 3 - Specialized ApplicationkhalidNo ratings yet
- Sustainability 13 06776 v3Document24 pagesSustainability 13 06776 v3khalidNo ratings yet
- Crossmark: Renewable and Sustainable Energy ReviewsDocument19 pagesCrossmark: Renewable and Sustainable Energy ReviewsdikochchNo ratings yet
- Energy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HeDocument15 pagesEnergy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HekhalidNo ratings yet
- Rasmussen 2012Document10 pagesRasmussen 2012khalidNo ratings yet
- Innovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StorageDocument19 pagesInnovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StoragekhalidNo ratings yet
- Electronics: Intermittent Renewable Energy Sources: The Role of Energy Storage in The European Power System of 2040Document18 pagesElectronics: Intermittent Renewable Energy Sources: The Role of Energy Storage in The European Power System of 2040khalidNo ratings yet
- Faisal2018 Ieee PDFDocument21 pagesFaisal2018 Ieee PDFAnonymous awwd0cnNo ratings yet
- Can Quantum-Mechanical Description of Physical Reality Be Considered Complete?Document4 pagesCan Quantum-Mechanical Description of Physical Reality Be Considered Complete?Andy HoNo ratings yet
- PV TableDocument18 pagesPV TablekhalidNo ratings yet
- Alternative Energies Updates On ProgressDocument286 pagesAlternative Energies Updates On ProgressFachransjah AliunirNo ratings yet
- 2020 Book FundamentalsOfElectricalPowerSDocument554 pages2020 Book FundamentalsOfElectricalPowerSkhalidNo ratings yet
- Salam 2018Document466 pagesSalam 2018Luis Alvaro Montoya Santiyanes100% (1)
- 09 - The Crab With The Golden Claws PDFDocument65 pages09 - The Crab With The Golden Claws PDFkhalidNo ratings yet
- Radial Distribution Test FeedersDocument5 pagesRadial Distribution Test FeedersAbhishek KukrejaNo ratings yet
- ECE361 Power Flow Hand Notes 2008Document17 pagesECE361 Power Flow Hand Notes 2008khalidNo ratings yet
- The Value of Interval Meter Data: in Solar PV Project AnalysisDocument11 pagesThe Value of Interval Meter Data: in Solar PV Project AnalysiskhalidNo ratings yet
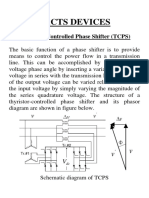
- Facts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)Document8 pagesFacts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)khalidNo ratings yet
- Transformer Sizing Using ETAP PDFDocument24 pagesTransformer Sizing Using ETAP PDFkhalidNo ratings yet
- Computer Project - 1-141Document1 pageComputer Project - 1-141M.S.AbdullahNo ratings yet
- Energy Efficiency - Benefits For Environment and Society (2015)Document200 pagesEnergy Efficiency - Benefits For Environment and Society (2015)khalidNo ratings yet
- IEEE 10 Generator 39 Bus System: General OutlineDocument7 pagesIEEE 10 Generator 39 Bus System: General Outlineadau100% (1)
- 03 Simplified SM Model ModifiedDocument6 pages03 Simplified SM Model ModifiedkhalidNo ratings yet
- Data Entry Operator Key Punch Operator (BS-08) Session BDocument3 pagesData Entry Operator Key Punch Operator (BS-08) Session BRao M. YasirNo ratings yet
- B.TECH SyllabusDocument184 pagesB.TECH Syllabusjonas knoxNo ratings yet
- Variable Range Led VoltmeterDocument1 pageVariable Range Led VoltmeterweberpermetersquareNo ratings yet
- Use CaseDocument5 pagesUse CaseRoy MasterNo ratings yet
- Youth and Social MediaDocument9 pagesYouth and Social MediaShreyas ShahaNo ratings yet
- Simple 4k Wallpaper - Google SearchDocument1 pageSimple 4k Wallpaper - Google SearchElix3rNo ratings yet
- Financial Accounting Tables Used in Business Planning and Consolidation NW 10.0Document20 pagesFinancial Accounting Tables Used in Business Planning and Consolidation NW 10.0SarathBabu BandarupalliNo ratings yet
- 840Dsl NCU Base Commiss Man en-US PDFDocument1,342 pages840Dsl NCU Base Commiss Man en-US PDF류성하No ratings yet
- Education - Training 33206 DataDocument180 pagesEducation - Training 33206 DataDushyant GuptaNo ratings yet
- Psi PopDocument31 pagesPsi PopRebecca Monzon0% (1)
- Growth Marketing Final PresentationDocument17 pagesGrowth Marketing Final PresentationAmna AhmedNo ratings yet
- RFI BTS SurveyDocument130 pagesRFI BTS SurveyMuzammil WepukuluNo ratings yet
- Delcam - ArtCAM 2010 Insignia TrainingCourse EN - 2010Document134 pagesDelcam - ArtCAM 2010 Insignia TrainingCourse EN - 2010akaki leqvinadzeNo ratings yet
- Natural Language UnderstandingDocument41 pagesNatural Language Understandingankurgarg123No ratings yet
- D63983GC20 - 30 - US Oracle Hyperion Financial Reporting 11.1.2 For EssbaseDocument3 pagesD63983GC20 - 30 - US Oracle Hyperion Financial Reporting 11.1.2 For EssbaseChinmaya MishraNo ratings yet
- PSAT 8/9 Practice TestDocument10 pagesPSAT 8/9 Practice Testpkien100% (1)
- Using IComparer IComparable For Sorting in WPFDocument6 pagesUsing IComparer IComparable For Sorting in WPFAbhiNo ratings yet
- How To Register The HospitalDocument55 pagesHow To Register The HospitalAkhilesh Dwivedi0% (1)
- Chapter 16IT Controls Part IIDocument10 pagesChapter 16IT Controls Part IIChene Soriano100% (1)
- OPC Factory ServerDocument420 pagesOPC Factory Servergeorgel1605100% (1)
- Chattr ManualDocument3 pagesChattr ManualgtirnanicNo ratings yet
- Resultados StataDocument76 pagesResultados StataAnthony AycayaNo ratings yet
- Control RoomDocument24 pagesControl Roomsarsan nedumkuzhi maniNo ratings yet
- QUINT-PS24DC48DC5 DC To DC ConverterDocument9 pagesQUINT-PS24DC48DC5 DC To DC ConverterMoutaz KhaterNo ratings yet
- RRU1861 UHF RFID Reader User's Manual V2.0Document39 pagesRRU1861 UHF RFID Reader User's Manual V2.0Krishnamoorthy HegdeNo ratings yet
- CSS Border Properties: ST NDDocument11 pagesCSS Border Properties: ST NDSubhadeep PandaNo ratings yet
- SokkiaioDocument24 pagesSokkiaioUlisesRiveraUrbanoNo ratings yet
- Deep LearningDocument34 pagesDeep Learningtheepi murugesanNo ratings yet
- Modelling and Simulation of An AFBC Steam Heating Plant Using ASPEN - SPDocument10 pagesModelling and Simulation of An AFBC Steam Heating Plant Using ASPEN - SPapi-3799861No ratings yet
- Part Number 60-41 Revision A: Instruction Manual Start-Up, Operation and MaintenanceDocument208 pagesPart Number 60-41 Revision A: Instruction Manual Start-Up, Operation and MaintenanceJesus Oliveros100% (1)