You might also like
- PID-Fuzzy Controller For Grate Cooler in Cement PlantDocument5 pagesPID-Fuzzy Controller For Grate Cooler in Cement PlantamirNo ratings yet
- Orchard Introduction To Simulink With Engineering Applications 2nd Edition MarDocument716 pagesOrchard Introduction To Simulink With Engineering Applications 2nd Edition MarDamith Buddhika Sri Wimalarathna100% (6)
- VESI Skills and Training Matrix-November 2014Document1 pageVESI Skills and Training Matrix-November 2014Satyen ChaturvediNo ratings yet
- Capella Wiring DiagramDocument1 pageCapella Wiring DiagramRandalNo ratings yet
- 217 Machine Learning: ProjectsDocument16 pages217 Machine Learning: ProjectsGeorge Iskander100% (1)
- SCADA MaterialDocument127 pagesSCADA Materialali mahmoud100% (1)
- Interlocking Examples PDFDocument2 pagesInterlocking Examples PDFghanNo ratings yet
- Fuzzy Logic ExamplesDocument59 pagesFuzzy Logic ExamplesGeorge IskanderNo ratings yet
- Wiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRDocument2 pagesWiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRSivan Raj50% (2)
- A Hands-On Course in Sensors Using PDFDocument259 pagesA Hands-On Course in Sensors Using PDFeaeros100% (1)
- Compact Installation Instructions: Sinamics G120XDocument2 pagesCompact Installation Instructions: Sinamics G120XFernando SAbinoNo ratings yet
- EMVDocument29 pagesEMVrajainfosysNo ratings yet
- Intelligent Control Systems EPM643: Fuzzy Logic ModellingDocument16 pagesIntelligent Control Systems EPM643: Fuzzy Logic ModellingGeorge IskanderNo ratings yet
- Machine Learning Notes For KTU Semester 7Document226 pagesMachine Learning Notes For KTU Semester 7Kiran SharmaNo ratings yet
- Schematic Diagram of 220 /132 /54 KV Traction SubstationDocument1 pageSchematic Diagram of 220 /132 /54 KV Traction SubstationjitendraNo ratings yet
- Applications.: RegeneratlveDocument1 pageApplications.: RegeneratlveCCI AVGNo ratings yet
- Oetc Grid Map-2011Document5 pagesOetc Grid Map-2011Krishna PardeshiNo ratings yet
- Off GRD Solar InverterDocument2 pagesOff GRD Solar InverterSreedharNo ratings yet
- 2023 WEGO Brochure Winter ToApril-1Document2 pages2023 WEGO Brochure Winter ToApril-1Sun Sand072No ratings yet
- Schematic TSS With 2 Xmer - REV 01Document1 pageSchematic TSS With 2 Xmer - REV 01shrirampandey99No ratings yet
- Benin 330kV LayoutDocument1 pageBenin 330kV LayoutjitendraNo ratings yet
- Cables and AccessoriesDocument1 pageCables and Accessoriesrajkumar222No ratings yet
- F1 PDFDocument1 pageF1 PDFMichael DarmstaedterNo ratings yet
- Cable Sizing of Ass1Document5 pagesCable Sizing of Ass1Achint singhNo ratings yet
- IEC - SC Output DatablockDocument1 pageIEC - SC Output DatablockTosikur RahmanNo ratings yet
- Crusher SLD-Model - PDF June 2Document1 pageCrusher SLD-Model - PDF June 2iqbal husseinNo ratings yet
- 132KV Bay 105Document129 pages132KV Bay 105Partha DeyNo ratings yet
- Electrical General Notes: Ofelio T. Miparanum Ofelio T. Miparanum Ofelio T. Miparanum Ofelio T. MiparanumDocument1 pageElectrical General Notes: Ofelio T. Miparanum Ofelio T. Miparanum Ofelio T. Miparanum Ofelio T. MiparanumBrigoli AlexanderNo ratings yet
- Neutral SwitchingDocument2 pagesNeutral SwitchingCayanan ArmanNo ratings yet
- 25 Urban Cruiser (Cont. Next Page) : ABS (W/o VSC)Document2 pages25 Urban Cruiser (Cont. Next Page) : ABS (W/o VSC)HEMIL ROBERTO RODRIGUEZ HERRERANo ratings yet
- TF 81SC VBL Interactive PDFDocument1 pageTF 81SC VBL Interactive PDFJUAN ENRIQUE TORRIJOS FLORESNo ratings yet
- EV West Off Grid Back Up PDFDocument1 pageEV West Off Grid Back Up PDFim247blackNo ratings yet
- EV West Off Grid Back Up PDFDocument1 pageEV West Off Grid Back Up PDFfoxNo ratings yet
- Canada: Usa E Usa WDocument1 pageCanada: Usa E Usa WSnowlyNo ratings yet
- Scale: 1: 200: Ballast and Bilge Arrangement in Engine RoomDocument1 pageScale: 1: 200: Ballast and Bilge Arrangement in Engine RoomDenis Irwin MaulanaNo ratings yet
- AURANGABADDocument1 pageAURANGABADnarinder kumarNo ratings yet
- Legend: 132KV Transfer BusDocument1 pageLegend: 132KV Transfer Busnarinder kumarNo ratings yet
- Chapter 2 One Page NotesDocument2 pagesChapter 2 One Page NoteswytaziNo ratings yet
- Jambaran Tiung Biru Project: Electrical Power and Control Cable Schedule - Substation No. 1Document2 pagesJambaran Tiung Biru Project: Electrical Power and Control Cable Schedule - Substation No. 1Alif AnsharNo ratings yet
- N YTEJVv 2 W TM SB IDWs EM0 o OAT2 OY1 ST 6 FG Wu P3 R WDDocument5 pagesN YTEJVv 2 W TM SB IDWs EM0 o OAT2 OY1 ST 6 FG Wu P3 R WDGayle BrigoleNo ratings yet
- CL Ean Ai R Sol Uon: PL Asma T Echnol Ogy Saf El y Removes VI Ruses, Bact Eri A, Moul D Spores, and VocsDocument1 pageCL Ean Ai R Sol Uon: PL Asma T Echnol Ogy Saf El y Removes VI Ruses, Bact Eri A, Moul D Spores, and VocsFassa LukhshodNo ratings yet
- Engineering Controlled Manufacturer:: Change DetailDocument1 pageEngineering Controlled Manufacturer:: Change DetailnobamoNo ratings yet
- Diagrama Unifilar UTC Model PDFDocument1 pageDiagrama Unifilar UTC Model PDFÁngel Steven Real GarcésNo ratings yet
- Elektronika Dasar Electronic Circuit Bipolar Junction TransistorDocument4 pagesElektronika Dasar Electronic Circuit Bipolar Junction TransistorAnti Gaptek -AGA-No ratings yet
- KNPC Maa, KNPC M64a CS Ar Ard 0002,1Document1 pageKNPC Maa, KNPC M64a CS Ar Ard 0002,1Senthilkumar KNo ratings yet
- 2019-042 Schema Unifilare MT Rev2-SBDocument1 page2019-042 Schema Unifilare MT Rev2-SBPredrag JelenkovicNo ratings yet
- EVD, EVDIS - EVD Evolution - : Electronic Expansion Valve Driver and Graphic DisplayDocument2 pagesEVD, EVDIS - EVD Evolution - : Electronic Expansion Valve Driver and Graphic Displayalexandre souzaNo ratings yet
- 4 910Document1 page4 910Subudhi Techno DesignNo ratings yet
- Grid Map - Plan 2020-25 - January - 2020.cdrDocument1 pageGrid Map - Plan 2020-25 - January - 2020.cdrSudipto RoyNo ratings yet
- Geo MapDocument1 pageGeo MapMhapuNo ratings yet
- 孟加拉电网分布图 PDFDocument1 page孟加拉电网分布图 PDFWinnjone YinNo ratings yet
- Geo Map PDFDocument1 pageGeo Map PDFsajjad_pirzadaNo ratings yet
- 孟加拉电网分布图 PDFDocument1 page孟加拉电网分布图 PDFWinnjone YinNo ratings yet
- 765 KV, 400 KV, 230 KV & 132 KV Grid Network (Existing, U/C & Planned)Document1 page765 KV, 400 KV, 230 KV & 132 KV Grid Network (Existing, U/C & Planned)SSDNo ratings yet
- 孟加拉电网分布图 PDFDocument1 page孟加拉电网分布图 PDFWinnjone YinNo ratings yet
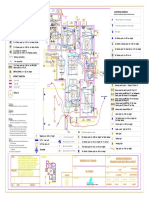
- Varun Valanjeri Electrical Layout-3Document1 pageVarun Valanjeri Electrical Layout-3ANOOP R NAIRNo ratings yet
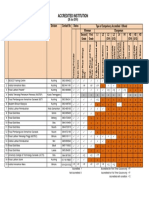
- Accredited Institution - EIUDocument1 pageAccredited Institution - EIUZuraimi JohariNo ratings yet
- Bargains!: National Library of AustraliaDocument24 pagesBargains!: National Library of AustraliaTash GlennNo ratings yet
- CHAPRADocument1 pageCHAPRAAyaz Ahmad KhanNo ratings yet
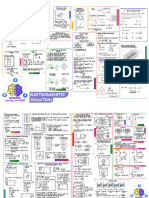
- Bhramastra Revision Patrika Physics Electromagnetic Induction MindmapsDocument2 pagesBhramastra Revision Patrika Physics Electromagnetic Induction Mindmapsyuvrajjadav882No ratings yet
- Electromagnetic Induction - Mind Map - Lakshya NEET 2024Document2 pagesElectromagnetic Induction - Mind Map - Lakshya NEET 2024Test UserNo ratings yet
- Schéma Électrique 923043Document1 pageSchéma Électrique 923043ChriskvaNo ratings yet
- Modern Physics 1 Page NotesDocument9 pagesModern Physics 1 Page NotesSudhamani BiswasNo ratings yet
- Isabela-Lamitan 69KV Transmission Line ProjectDocument15 pagesIsabela-Lamitan 69KV Transmission Line ProjectCharlie Micah T. AquinoNo ratings yet
- 5840-ER-001 E-HouseDocument4 pages5840-ER-001 E-Houseluiscoarita.g30No ratings yet
- Equipment Grounding ConductorDocument1 pageEquipment Grounding Conductoramelna enterpriNo ratings yet
- Layout Plan of Scarfing Ecr First Floor (Sw. Gr. Room) Layout Plan of Scarfing Ecr Third Floor (PLC Room)Document1 pageLayout Plan of Scarfing Ecr First Floor (Sw. Gr. Room) Layout Plan of Scarfing Ecr Third Floor (PLC Room)Chandan GaraiNo ratings yet
- Catalog C-1 Accumulators and ReceiversDocument17 pagesCatalog C-1 Accumulators and ReceiversHewa AkreyNo ratings yet
- Catalog C-1 Accumulators and ReceiversDocument17 pagesCatalog C-1 Accumulators and ReceiversPutra LangitNo ratings yet
- Model Predictive Control: Simone BertoniDocument8 pagesModel Predictive Control: Simone BertoniGeorge IskanderNo ratings yet
- A New Fuzzy Stabilizer Based On Online LDocument10 pagesA New Fuzzy Stabilizer Based On Online LGeorge IskanderNo ratings yet
- Machine Learning Pipeline: Created by Arbaz AliDocument32 pagesMachine Learning Pipeline: Created by Arbaz AliGeorge IskanderNo ratings yet
- TOP 7 Python Libraries For DATA Visualization!!Document9 pagesTOP 7 Python Libraries For DATA Visualization!!AtakanNo ratings yet
- Coordinated AVR PSS For Transient StabilDocument8 pagesCoordinated AVR PSS For Transient StabilGeorge IskanderNo ratings yet
- Structured Text Tutorial PDFDocument31 pagesStructured Text Tutorial PDFMrSarvanNo ratings yet
- DC-motor Modelling and Parameter IdentificationDocument22 pagesDC-motor Modelling and Parameter IdentificationGeorge IskanderNo ratings yet
- SF UgDocument896 pagesSF UgmathieuswNo ratings yet
- MC Ty Parts 2009 1 PDFDocument7 pagesMC Ty Parts 2009 1 PDFAndrew ChenNo ratings yet
- Infoplc Net PLCDocument41 pagesInfoplc Net PLCGeorge IskanderNo ratings yet
- Random Variables and Probability DistributionDocument21 pagesRandom Variables and Probability DistributionGeorge IskanderNo ratings yet
- 92991v00 Machine Learning Section1 Ebook PDFDocument12 pages92991v00 Machine Learning Section1 Ebook PDFNorman ScheelNo ratings yet
- Intro To MechatronicsDocument33 pagesIntro To MechatronicscorozcogarciaNo ratings yet
- Block Diagram Reduction RulesDocument9 pagesBlock Diagram Reduction RulesGianco VillarrealNo ratings yet
- Intro To MechatronicsDocument33 pagesIntro To MechatronicscorozcogarciaNo ratings yet
- Ok Robot ProgrammingDocument56 pagesOk Robot ProgrammingGeorge IskanderNo ratings yet
- DQ TransformationDocument51 pagesDQ TransformationAili LuggymixNo ratings yet
- SP14 CS188 Lecture 3 - Informed SearchDocument69 pagesSP14 CS188 Lecture 3 - Informed Searchimoptra143No ratings yet
- LectureDocument35 pagesLectureSuvin NambiarNo ratings yet
- Function & ITF (Ph-4) (Sol)Document5 pagesFunction & ITF (Ph-4) (Sol)Raju SinghNo ratings yet
- CNN Architectures For Large-Scale Audio ClassificationDocument5 pagesCNN Architectures For Large-Scale Audio ClassificationRizki Jumadil PutraNo ratings yet
- Chapter 4Document34 pagesChapter 4ALBERTUS DENo ratings yet
- Data Structure AucseDocument10 pagesData Structure AucseyogeshdxtNo ratings yet
- CS2351 AI Question Paper April May 2011Document1 pageCS2351 AI Question Paper April May 2011profBalamuruganNo ratings yet
- ISYE 6420 SyllabusDocument1 pageISYE 6420 SyllabusYasin Çagatay GültekinNo ratings yet
- Transfer Function - Poles and Zeros - StabilityDocument9 pagesTransfer Function - Poles and Zeros - Stability666667No ratings yet
- Sliding Mode Control HandoutDocument42 pagesSliding Mode Control HandoutGabriel MejiaNo ratings yet
- Linear Optimal Control SystemsDocument22 pagesLinear Optimal Control SystemsalvandresNo ratings yet
- IA Physics This Template Is For Guidance OnlyDocument5 pagesIA Physics This Template Is For Guidance OnlynaimaNo ratings yet
- Methods For Aggregate PlanningDocument8 pagesMethods For Aggregate PlanningJoy Monteagudo IbahanNo ratings yet
- Zodiac Cryptography CaseDocument9 pagesZodiac Cryptography CaseLeandros MavrokefalosNo ratings yet
- Ajol File Journals - 660 - Articles - 229282 - Submission - Proof - 229282 7780 557222 1 10 20220805Document17 pagesAjol File Journals - 660 - Articles - 229282 - Submission - Proof - 229282 7780 557222 1 10 20220805dzulfikar fahleviNo ratings yet
- Heap Data StructureDocument5 pagesHeap Data StructureISR EducationsNo ratings yet
- NR-311201-Design and Analysis of AlgorithmsDocument8 pagesNR-311201-Design and Analysis of AlgorithmsSrinivasa Rao GNo ratings yet
- LINFO2262: Machine Learning: Classification and EvaluationDocument39 pagesLINFO2262: Machine Learning: Classification and EvaluationQuentin LambotteNo ratings yet
- Business Statistics and RM: Hamendra Dangi 9968316938Document21 pagesBusiness Statistics and RM: Hamendra Dangi 9968316938Adil AliNo ratings yet
- Analytic Hierarchy ProcessDocument2 pagesAnalytic Hierarchy ProcessAnthony KwoNo ratings yet
- Visvesvaraya Technological University: "Securing Data in Internet of Things (Iot) Using Cryptography andDocument3 pagesVisvesvaraya Technological University: "Securing Data in Internet of Things (Iot) Using Cryptography andKrapani PonnammaNo ratings yet
- General EquilibriumDocument4 pagesGeneral EquilibriumSaadgi AgarwalNo ratings yet
- CSE101Lec 14 - 15 - 16 - 20201014 083027311Document66 pagesCSE101Lec 14 - 15 - 16 - 20201014 083027311Sidharth SinghNo ratings yet
- Assignment NotesDocument9 pagesAssignment NotesVikram MulikNo ratings yet
- UNIT-3 Functions of Several VariablesDocument36 pagesUNIT-3 Functions of Several VariablesSujith.VetriMaaranNo ratings yet
- Path Integral Methods For Parabolic Partial Differential Equations With Examples From Computational FinanceDocument24 pagesPath Integral Methods For Parabolic Partial Differential Equations With Examples From Computational FinancePecu TsaiNo ratings yet
- Assignment 1Document2 pagesAssignment 1Mohammed BahysmiNo ratings yet
- @face X 0, Ux 0 @face X Width, " Linear Constraint Equation" @face Y 0, Uy 0 @face Y Width, Uy Is Specified @face Z 0, Uz 0 @face Z Width, " Linear Constraint Equation"Document3 pages@face X 0, Ux 0 @face X Width, " Linear Constraint Equation" @face Y 0, Uy 0 @face Y Width, Uy Is Specified @face Z 0, Uz 0 @face Z Width, " Linear Constraint Equation"VijaybalajiNo ratings yet