You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- M Information Systems 6Th Edition Full ChapterDocument41 pagesM Information Systems 6Th Edition Full Chapterkathy.morrow289100% (24)
- Chord ProgressionDocument6 pagesChord ProgressiongernNo ratings yet
- Dyson Case StudyDocument4 pagesDyson Case Studyolga100% (3)
- M2200-98 Lesson 06 - Practice Problems - Solutions PDFDocument8 pagesM2200-98 Lesson 06 - Practice Problems - Solutions PDFShade FrankNo ratings yet
- Implicit & Log Di↵erentiation Solutions MATH 2200Document9 pagesImplicit & Log Di↵erentiation Solutions MATH 2200Shade FrankNo ratings yet
- M2200-98 Lesson 08 - Notes - Graphing Functions Using The DerivativeDocument7 pagesM2200-98 Lesson 08 - Notes - Graphing Functions Using The DerivativeShade FrankNo ratings yet
- M2200-98 Lesson 08 - Notes - Graphing Functions Using The Derivative PDFDocument14 pagesM2200-98 Lesson 08 - Notes - Graphing Functions Using The Derivative PDFShade FrankNo ratings yet
- M2200-98 Lesson 03 - Notes - Continuity and Defn of The DerivativeDocument16 pagesM2200-98 Lesson 03 - Notes - Continuity and Defn of The DerivativeShade FrankNo ratings yet
- M2200-98 Lesson 06 - Notes - Rates of Change and Related RatesDocument7 pagesM2200-98 Lesson 06 - Notes - Rates of Change and Related RatesShade FrankNo ratings yet
- M2200-98 Lesson 07 - Notes - LHopitals RuleDocument10 pagesM2200-98 Lesson 07 - Notes - LHopitals RuleShade FrankNo ratings yet
- M2200-98 Lesson 02 - Notes - Limits and InfinityDocument12 pagesM2200-98 Lesson 02 - Notes - Limits and InfinityShade FrankNo ratings yet
- Rules of Differentiation LessonDocument15 pagesRules of Differentiation LessonShade FrankNo ratings yet
- M2200-98 Lesson 01 - Notes - Intro To Limits and Their PropertiesDocument12 pagesM2200-98 Lesson 01 - Notes - Intro To Limits and Their PropertiesShade FrankNo ratings yet
- M2200-98 Lesson 05 - Notes - Implicit and Log Differentiation PDFDocument11 pagesM2200-98 Lesson 05 - Notes - Implicit and Log Differentiation PDFShade FrankNo ratings yet
- 12 Smart Micro-Habits To Increase Your Daily Productivity by Jari Roomer Better Advice Oct, 2021 MediumDocument9 pages12 Smart Micro-Habits To Increase Your Daily Productivity by Jari Roomer Better Advice Oct, 2021 MediumRaja KhanNo ratings yet
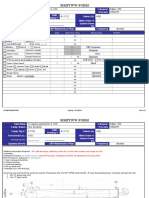
- Simptww S-1105Document3 pagesSimptww S-1105Vijay RajaindranNo ratings yet
- Miss Daydreame1Document1 pageMiss Daydreame1Mary Joy AlbandiaNo ratings yet
- Verbos Regulares e IrregularesDocument8 pagesVerbos Regulares e IrregularesJerson DiazNo ratings yet
- Cookery-10 LAS-Q3 Week5Document7 pagesCookery-10 LAS-Q3 Week5Angeline Cortez100% (1)
- Brochure - Coming To Work in The Netherlands (2022)Document16 pagesBrochure - Coming To Work in The Netherlands (2022)Tshifhiwa MathivhaNo ratings yet
- First Preliminary Examination in Tle 8 - Mechanical DraftingDocument6 pagesFirst Preliminary Examination in Tle 8 - Mechanical DraftingNefritiri BlanceNo ratings yet
- String length recommendations and brace height advice for Uukha bowsDocument1 pageString length recommendations and brace height advice for Uukha bowsPak Cik FauzyNo ratings yet
- Hydrocarbon LawDocument48 pagesHydrocarbon LawParavicoNo ratings yet
- Ten Lessons (Not?) Learnt: Asset AllocationDocument30 pagesTen Lessons (Not?) Learnt: Asset AllocationkollingmNo ratings yet
- Electric Vehicles PresentationDocument10 pagesElectric Vehicles PresentationKhagesh JoshNo ratings yet
- Aftab Automobiles LTD - Surveillance Report 2015Document13 pagesAftab Automobiles LTD - Surveillance Report 2015Mehedi Hasan RimonNo ratings yet
- Legend of The Galactic Heroes, Vol. 10 Sunset by Yoshiki Tanaka (Tanaka, Yoshiki)Document245 pagesLegend of The Galactic Heroes, Vol. 10 Sunset by Yoshiki Tanaka (Tanaka, Yoshiki)StafarneNo ratings yet
- Practical Research 1 - Quarter 1 - Module 1 - Nature and Inquiry of Research - Version 3Document53 pagesPractical Research 1 - Quarter 1 - Module 1 - Nature and Inquiry of Research - Version 3Iris Rivera-PerezNo ratings yet
- Your Porsche CodeDocument10 pagesYour Porsche Codemahmut ezikNo ratings yet
- Airforce Group Y: Previous Y Ear P AperDocument14 pagesAirforce Group Y: Previous Y Ear P Aperajay16duni8No ratings yet
- Critiquing a Short Story About an Aged MotherDocument2 pagesCritiquing a Short Story About an Aged MotherJohn Rey PacubasNo ratings yet
- Voluntary Vs MandatoryDocument5 pagesVoluntary Vs MandatoryGautam KumarNo ratings yet
- AccentureDocument11 pagesAccenturecentum1234No ratings yet
- Final DSL Under Wire - FinalDocument44 pagesFinal DSL Under Wire - Finalelect trsNo ratings yet
- City Government of San Juan: Business Permits and License OfficeDocument3 pagesCity Government of San Juan: Business Permits and License Officeaihr.campNo ratings yet
- A Study On Waves of FeminismDocument3 pagesA Study On Waves of FeminismLusekero MwangondeNo ratings yet
- The Secret Path Lesson 2Document22 pagesThe Secret Path Lesson 2Jacky SoNo ratings yet
- World War 2 Soldier Stories - Ryan JenkinsDocument72 pagesWorld War 2 Soldier Stories - Ryan JenkinsTaharNo ratings yet
- INDEX OF 3D PRINTED CONCRETE RESEARCH DOCUMENTDocument15 pagesINDEX OF 3D PRINTED CONCRETE RESEARCH DOCUMENTAkhwari W. PamungkasjatiNo ratings yet
- Biomass Characterization Course Provides Overview of Biomass Energy SourcesDocument9 pagesBiomass Characterization Course Provides Overview of Biomass Energy SourcesAna Elisa AchilesNo ratings yet
- FraudDocument77 pagesFraudTan Siew Li100% (2)