You might also like
- II Estado Del ArteDocument2 pagesII Estado Del ArteLebneizNo ratings yet
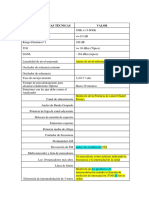
- Características TécnicasDocument2 pagesCaracterísticas TécnicasLebneizNo ratings yet
- Curso AlumnosDocument1 pageCurso AlumnosLebneizNo ratings yet
- Lineamientos Requerimientos Sig UnsainvestigaDocument13 pagesLineamientos Requerimientos Sig UnsainvestigaLebneizNo ratings yet
- N.T. #022-MINSADGSP-V.02. Norma Técnica de La Historia Clínica de Los Est. Del Sector #022-MINSADocument48 pagesN.T. #022-MINSADGSP-V.02. Norma Técnica de La Historia Clínica de Los Est. Del Sector #022-MINSAFernando IriarteNo ratings yet
- Anexo 1Document1 pageAnexo 1LebneizNo ratings yet
- Reglamento Elecciones 2013 - CEEPIEDocument8 pagesReglamento Elecciones 2013 - CEEPIEJuan AntonioNo ratings yet
- TrabajoFerrel PASAALTOS TruqueadoDocument2 pagesTrabajoFerrel PASAALTOS TruqueadoLebneizNo ratings yet
- Balotario Tres Biomedica 2017BDocument27 pagesBalotario Tres Biomedica 2017BLebneizNo ratings yet
- Matlab Diezmado Interpolacion-Pds MatlabDocument3 pagesMatlab Diezmado Interpolacion-Pds MatlabLebneizNo ratings yet
- AbstractDocument4 pagesAbstractLebneizNo ratings yet
- Examen1 MicroDocument1 pageExamen1 MicroLebneizNo ratings yet
- Código Previo TL2Document1 pageCódigo Previo TL2LebneizNo ratings yet
- Clasificar Helicasas ADN MLP CDocument33 pagesClasificar Helicasas ADN MLP CEddy Paz TiconaNo ratings yet
- Problemas Fichas TecnicasDocument4 pagesProblemas Fichas TecnicasAlejandro TovarNo ratings yet
- Instalacion y Configuracion TSM CAPDocument59 pagesInstalacion y Configuracion TSM CAPHector Varon SNo ratings yet
- ApuntesDocument310 pagesApuntesStephanie TorresNo ratings yet
- Relaciones y ConsultasDocument9 pagesRelaciones y ConsultasEdgardo TaboraNo ratings yet
- Java en La WebDocument27 pagesJava en La WebVictor VelázquezNo ratings yet
- Firmware LinkStation 1.74Document4 pagesFirmware LinkStation 1.74jarabitoNo ratings yet
- Practica Windows UpdateDocument7 pagesPractica Windows UpdateJazminNo ratings yet
- Examen CTERA Técnico 6M9XQNVDocument10 pagesExamen CTERA Técnico 6M9XQNVAlfredo AstaNo ratings yet
- Arreglos y Listas EnlazadasDocument11 pagesArreglos y Listas EnlazadasFojiNo ratings yet
- Cuestionario de Preguntas ArquitecturaDocument10 pagesCuestionario de Preguntas ArquitecturaKarina Yessenia Barrionuevo83% (6)
- Oracle Webcenter Sites 12cDocument58 pagesOracle Webcenter Sites 12cTrurlScribdNo ratings yet
- Unidad 4 IADocument15 pagesUnidad 4 IAkevinkevlarNo ratings yet
- Programación II - Arreglos y MatricesDocument17 pagesProgramación II - Arreglos y MatricesNilzer TorreNo ratings yet
- 6 Comandos Básicos de PowerShell para Obtener Más de WindowsDocument8 pages6 Comandos Básicos de PowerShell para Obtener Más de WindowsmazacotesNo ratings yet
- Introduccion AMPLDocument27 pagesIntroduccion AMPLyeraldy100% (1)
- Componentes de Las ComputadorasDocument2 pagesComponentes de Las Computadorasglo_darkangel1809100% (2)
- Solución Del Problema Del Viajero Comerciante TSP UsandoDocument30 pagesSolución Del Problema Del Viajero Comerciante TSP UsandoStephanie M Barreda Sotomayor0% (1)
- 315 InvOperaciones Plan CursoDocument11 pages315 InvOperaciones Plan CursoSahira AcostaNo ratings yet
- Wuolah-free-Modelo Prueba Escrita E-2 - AutoCADDocument1 pageWuolah-free-Modelo Prueba Escrita E-2 - AutoCADBeatriz Castro GilNo ratings yet
- Revista Digital PDFDocument22 pagesRevista Digital PDFCristian LopezNo ratings yet
- Que Es DFDDocument3 pagesQue Es DFDYanet Mariza SaguaNo ratings yet
- Sistema de paginación y segmentación en MULTICSDocument20 pagesSistema de paginación y segmentación en MULTICSEilynn FigueroaNo ratings yet
- 9.2.1.10 Packet Tracer Configuring Standard ACLs InstructionsDocument4 pages9.2.1.10 Packet Tracer Configuring Standard ACLs InstructionsNeftalí Alvarado RosalesNo ratings yet
- Extensión de Un Archivo de Visual BasicDocument7 pagesExtensión de Un Archivo de Visual BasicrossyperazaNo ratings yet
- Comparación de Métodos para El Control de ConcurrenciaDocument5 pagesComparación de Métodos para El Control de ConcurrenciaEdward GarridoNo ratings yet
- Simulación Montecarlo Excel flujo cajaDocument5 pagesSimulación Montecarlo Excel flujo cajaOswaldo BaqueNo ratings yet
- Introducción a la ingeniería con ArduinoDocument10 pagesIntroducción a la ingeniería con ArduinoDoyler LastreNo ratings yet
- Tutorial para Imprimir en Blanco y Negro en Autocad 2010Document8 pagesTutorial para Imprimir en Blanco y Negro en Autocad 2010cheri21No ratings yet