You might also like
- Sistemas de de Arranque de Los Motores TrifasicosDocument10 pagesSistemas de de Arranque de Los Motores TrifasicosKelynd Astete VerdeNo ratings yet
- ConfiabilidadDocument8 pagesConfiabilidadEVELYN DEYANIRA ARELLANO HERNANDEZ100% (1)
- Maquinas y Herramientas en Procesos de ManufacturaDocument13 pagesMaquinas y Herramientas en Procesos de ManufacturaHernan BarretoNo ratings yet
- Om 6020 In0001Document39 pagesOm 6020 In0001GiomarNo ratings yet
- PRÁCTICA Nº1.proyectosDocument8 pagesPRÁCTICA Nº1.proyectosVanessa De La Cruz100% (1)
- Pracrico ProgramacionDocument21 pagesPracrico ProgramacionYuliana Rocha pacajeNo ratings yet
- Las Operaciones en Una Empresa Son Todas Aquellas Actividades Que Tienen Relación Con Las Áreas de La Misma Que Generan El Producto o Servicio Que Se Ofrece A Los ClientesDocument3 pagesLas Operaciones en Una Empresa Son Todas Aquellas Actividades Que Tienen Relación Con Las Áreas de La Misma Que Generan El Producto o Servicio Que Se Ofrece A Los ClientesJackeline SolarteNo ratings yet
- Proyecto Integrador.Document5 pagesProyecto Integrador.ennmanuelNo ratings yet
- Avance ExposiciónDocument16 pagesAvance ExposiciónAlexandra BlancoNo ratings yet
- Unidad 3 Desde PARTE 2 y Final 2Document107 pagesUnidad 3 Desde PARTE 2 y Final 2Valentina Vargas BarreraNo ratings yet
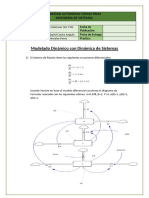
- Modelado Dinámico Con Dinámica de SistemasDocument2 pagesModelado Dinámico Con Dinámica de SistemasBrandon CayoNo ratings yet
- Examen ParcialDocument3 pagesExamen ParcialSACSA MOSCOSO DAMIAN COSMENo ratings yet
- Caso de Estudio Investigación OperativaDocument15 pagesCaso de Estudio Investigación OperativaDario PaucarNo ratings yet
- Aplicaciones Del Ciclo BraytonDocument21 pagesAplicaciones Del Ciclo BraytonLuisinho LCNo ratings yet
- Actividad Administración de La ProducciónDocument2 pagesActividad Administración de La Producciónluz17% (6)
- Proyecto IntegradorDocument5 pagesProyecto IntegradorennmanuelNo ratings yet
- Modelo Costos Integrales de LogiticaDocument30 pagesModelo Costos Integrales de LogiticaSebastian RodriguezNo ratings yet
- Programación LinealDocument14 pagesProgramación LinealRaúl VelasquezNo ratings yet
- PRACTICAS DE COSTOS PROBLEMAS #5 Y 6 2do CICLO UAM - 3 2020Document2 pagesPRACTICAS DE COSTOS PROBLEMAS #5 Y 6 2do CICLO UAM - 3 2020FrancoHernanPomaFuentesNo ratings yet
- Talleres o Ejercicios InvetigacionDocument2 pagesTalleres o Ejercicios InvetigacionJoseph VegaNo ratings yet
- Computacional UcsmDocument18 pagesComputacional UcsmjoseNo ratings yet
- Tarea MRP Nov 2019Document3 pagesTarea MRP Nov 2019Dani MirandaNo ratings yet
- Indicaciones para El Examen Final de Programación I 2021-1Document7 pagesIndicaciones para El Examen Final de Programación I 2021-1Alex SpinoNo ratings yet
- Método de Valoración Por Tiempos PredeterminadosDocument3 pagesMétodo de Valoración Por Tiempos Predeterminadosjuan carlos valderrama oropezaNo ratings yet
- Probs FormulacionDocument5 pagesProbs FormulacionAlejandro D. J. VegaNo ratings yet
- Ejemplos de Neumatica AplicadaDocument4 pagesEjemplos de Neumatica Aplicadalord_helix_hell666No ratings yet
- 5 6 ProductividadDocument5 pages5 6 ProductividadKatia MendezNo ratings yet
- Un Inductor VirtualDocument6 pagesUn Inductor Virtualapi-309978114No ratings yet
- TAREA 4 Minimizacion de Procesos WinQSBDocument8 pagesTAREA 4 Minimizacion de Procesos WinQSBGeovanny HaroNo ratings yet
- Trabajo Final de Accionamiento-Semaforo Inteligente PDFDocument11 pagesTrabajo Final de Accionamiento-Semaforo Inteligente PDFCristian Carrion100% (1)
- Demanda Del AireDocument4 pagesDemanda Del AireEdwin Emilio Rosario MatosNo ratings yet
- Tarea 4Document2 pagesTarea 4Luz MercadoNo ratings yet
- Todos Los CapitulosDocument95 pagesTodos Los CapitulosennmanuelNo ratings yet
- IO 2019 Actividad Encuentro 3 Introduccion PLDocument10 pagesIO 2019 Actividad Encuentro 3 Introduccion PLzulemaNo ratings yet
- Infor de TTL 7404, 7408 y 7432Document15 pagesInfor de TTL 7404, 7408 y 7432frandyNo ratings yet
- Ergonomía 3 Diseño de Puestos de Trabajo - (PG 53 - 55) PDFDocument3 pagesErgonomía 3 Diseño de Puestos de Trabajo - (PG 53 - 55) PDFJuan Andres Giraldo GiraldoNo ratings yet
- Prueba Segundo BimestreDocument5 pagesPrueba Segundo BimestreWilson ErasNo ratings yet
- Los Sistemas Embebidos y La Industria 5.0Document8 pagesLos Sistemas Embebidos y La Industria 5.0Andrea Camila Castro VasquézNo ratings yet
- Taller de Asociación Entre VariablesDocument2 pagesTaller de Asociación Entre VariablesArNold ArroyoNo ratings yet
- Practica1 386 12016Document12 pagesPractica1 386 12016cristobal67% (3)
- IN395-Material - 2021 1Document43 pagesIN395-Material - 2021 1DarlingManuelRamosValleNo ratings yet
- Secuencia en Cascada para Dos Cilindros de Doble EfectoDocument4 pagesSecuencia en Cascada para Dos Cilindros de Doble Efectoyo mismoNo ratings yet
- Practica 1 Modelo de PL 12012Document13 pagesPractica 1 Modelo de PL 12012Pablo Garcia GarrónNo ratings yet
- Taller Programación Lineal EnteraDocument1 pageTaller Programación Lineal Enteracham213No ratings yet
- Investigacion de Operaciones IIDocument33 pagesInvestigacion de Operaciones IILuiza Melendez DNo ratings yet
- Robot BomberoDocument6 pagesRobot Bomberocarolina abigail jimenez cortezNo ratings yet
- Laboratorio 01 FIMEDocument5 pagesLaboratorio 01 FIMEBony DiazgNo ratings yet
- Analisis de SensibilidadexposDocument11 pagesAnalisis de Sensibilidadexposclaudia quispeNo ratings yet
- Preguntas Om y Problemas Expo Cap 43 y 45Document4 pagesPreguntas Om y Problemas Expo Cap 43 y 45Sebastian ParraNo ratings yet
- Redes de Petri AutomIndustrialDocument4 pagesRedes de Petri AutomIndustrialAdrián Jácome TrujilloNo ratings yet
- Tareas 2 CorteDocument12 pagesTareas 2 CorteKenia Alejandra Ruiz GNo ratings yet
- Diseño de Una Transmisión Por Fajas Trapezoidales para Un CompresorDocument21 pagesDiseño de Una Transmisión Por Fajas Trapezoidales para Un CompresorHanover PedroNo ratings yet
- Ejercicio 3 - 2020 - 2Document1 pageEjercicio 3 - 2020 - 2Daniel ChichoNo ratings yet
- Métricas Orientadas A TamañoDocument3 pagesMétricas Orientadas A TamañoJesús Cabello MfcNo ratings yet
- Taller Capacidad.Document3 pagesTaller Capacidad.JohanaGutierrezNo ratings yet
- Introducción A La EconomíaDocument101 pagesIntroducción A La Economíajhomar45598No ratings yet
- Consumiendo: Introducción al consumo y al consumidor colombianoFrom EverandConsumiendo: Introducción al consumo y al consumidor colombianoNo ratings yet
- Informe de RoboticaDocument11 pagesInforme de RoboticaBayron EduardoNo ratings yet
- ProyectoDocument28 pagesProyectoRodrigo HerreraNo ratings yet
- Reconocimiento de Formas y Colores Con LabviewDocument13 pagesReconocimiento de Formas y Colores Con LabviewAlberto Iztatik100% (1)
- Proforma de Instalacion de Camaras para MinibusDocument1 pageProforma de Instalacion de Camaras para MinibusMaykol ChipanaNo ratings yet
- CircuitosDocument13 pagesCircuitosMaykol ChipanaNo ratings yet
- Proforma de Instalacion de Camaras para MinibusDocument1 pageProforma de Instalacion de Camaras para MinibusMaykol ChipanaNo ratings yet
- Señor MartinesDocument1 pageSeñor MartinesMaykol ChipanaNo ratings yet
- Tarea UpeaDocument13 pagesTarea UpeaMaykol ChipanaNo ratings yet
- Curso Embragues VI ESDocument49 pagesCurso Embragues VI ESMaykol ChipanaNo ratings yet
- DomoticaDocument23 pagesDomoticaMaykol ChipanaNo ratings yet
- Tarea UpeaDocument13 pagesTarea UpeaMaykol ChipanaNo ratings yet
- Hola Mundo en C#Document31 pagesHola Mundo en C#Itzel GuadalupeNo ratings yet
- RasputinDocument10 pagesRasputinMaykol Chipana0% (1)
- Justificación e Importancia de La InvestigaciónDocument6 pagesJustificación e Importancia de La InvestigaciónRenzo Miguel Castillo ÑacayauriNo ratings yet
- Control de Accesos Rfid Con ArduinoDocument7 pagesControl de Accesos Rfid Con ArduinoEalrNo ratings yet
- Proyecto Grua Con ArduinoDocument5 pagesProyecto Grua Con ArduinoANGELA MONSERRATH CAVAZOS REYESNo ratings yet
- Anakino - Aquarium o Instala Arduino en Tu AcuarioDocument6 pagesAnakino - Aquarium o Instala Arduino en Tu Acuariojamer205No ratings yet
- Interrupciones Externas Atmega8 Hetpro-StoreDocument7 pagesInterrupciones Externas Atmega8 Hetpro-StoreAnonymous E2nzYTXWNo ratings yet
- Manual ArduinoDocument79 pagesManual ArduinoDiana VillafuerteNo ratings yet
- Proyecto Final SensoricaDocument6 pagesProyecto Final SensoricaOscar Eduardo Alzate CardonaNo ratings yet
- Syllabus Curso ArduinoElectronica ERCCDocument2 pagesSyllabus Curso ArduinoElectronica ERCCEDUARDO RUBEN CAJAS CALVOPIÑANo ratings yet
- Temario Completo Curso ArduinoDocument3 pagesTemario Completo Curso ArduinoSystech AsesoresNo ratings yet
- Equipo 1 IA Deteccion de ObstaculosDocument18 pagesEquipo 1 IA Deteccion de ObstaculosLUCERONo ratings yet
- Lista de PreciosDocument54 pagesLista de PreciosraulNo ratings yet
- Entradas ArduinoDocument11 pagesEntradas ArduinoAndres AndradeNo ratings yet
- Andres-Ubeda Practicas FSIDocument32 pagesAndres-Ubeda Practicas FSIGinna LeytonNo ratings yet
- 003 Guia LABORATORIO DE AUTOTRÓNICADocument26 pages003 Guia LABORATORIO DE AUTOTRÓNICARoel Hector Cruz AnampaNo ratings yet
- Informe 1Document23 pagesInforme 1Patricia Infante CastroNo ratings yet
- Contador de Décadas CD4017 Con 10 Salidas DecodedDocument12 pagesContador de Décadas CD4017 Con 10 Salidas DecodedJavierNo ratings yet
- Microprocesadores y Microcontroladores Paso3 Grupo 29Document40 pagesMicroprocesadores y Microcontroladores Paso3 Grupo 29Anonymous IjTVNH100% (1)
- Presentación ARDUINODocument75 pagesPresentación ARDUINOJuan AlarcónNo ratings yet
- Como Hacer Un PLC Con Atmega 328PDocument17 pagesComo Hacer Un PLC Con Atmega 328POscar GarciaNo ratings yet
- Arduino .Document5 pagesArduino .JOSE RIOSNo ratings yet
- Universidad Tecnológica CadereytaDocument25 pagesUniversidad Tecnológica CadereytaMarco CastañedaNo ratings yet
- Regulador de Potencia en Ac Gestionado Por MicrocontroladorDocument156 pagesRegulador de Potencia en Ac Gestionado Por Microcontroladordaniel borbonNo ratings yet
- Tríptico Tacho ElectrónicoDocument2 pagesTríptico Tacho ElectrónicoCarlos Valdez Salazar100% (1)
- Unesum Ecu Redes 2017 26Document121 pagesUnesum Ecu Redes 2017 26Guadalupe SalinasNo ratings yet
- Proyecto Final Micro LabDocument4 pagesProyecto Final Micro LabWilber Ramirez LinaresNo ratings yet
- Sensor de Flujo Terminado 1Document5 pagesSensor de Flujo Terminado 1Jose BarreraNo ratings yet
- BIPEDODocument10 pagesBIPEDORenato SaavedraNo ratings yet
- La Revolución de Los Datos: Sensores e Internet de Las CosasDocument6 pagesLa Revolución de Los Datos: Sensores e Internet de Las CosasSoraya Paniagua AmadorNo ratings yet
- Arduino Blocks PracticasDocument123 pagesArduino Blocks PracticasEmma Fernández Díaz100% (1)
- Proyecto Carro BluetoothDocument24 pagesProyecto Carro BluetoothLeonardo HernandezNo ratings yet