You might also like
- E 713Document30 pagesE 713KibarNo ratings yet
- UIC Leaflet 406Document56 pagesUIC Leaflet 406devidattairsme100% (1)
- E 720Document50 pagesE 720Shama100% (2)
- UIC E717Document20 pagesUIC E717umutakinNo ratings yet
- Uic 518-2Document78 pagesUic 518-2steeven7783% (6)
- Uic 518 2 PDFDocument78 pagesUic 518 2 PDFDaniel100% (1)
- UIC Code: Timetable Recovery Margins To Guarantee Timekeeping - Recovery MarginsDocument15 pagesUIC Code: Timetable Recovery Margins To Guarantee Timekeeping - Recovery MarginsStrahinja OgnjanovicNo ratings yet
- Static loading diagrams for rail structuresDocument15 pagesStatic loading diagrams for rail structuresVadim100% (1)
- Handbok UIC406Document26 pagesHandbok UIC406cyberspheresNo ratings yet
- UIC code 700 classification of railway lines and load limits for wagonsDocument28 pagesUIC code 700 classification of railway lines and load limits for wagonsMontserrat BustiosNo ratings yet
- Railway Transition StructuresDocument10 pagesRailway Transition Structureslamkinpark3373No ratings yet
- Uic 506Document59 pagesUic 506Vadim100% (4)
- Uic 725Document30 pagesUic 725Enmanuel Guzman Perez100% (1)
- Loads on Railway BridgesDocument51 pagesLoads on Railway Bridgeslamkinpark3373100% (8)
- UIC Codex 779 9eDocument68 pagesUIC Codex 779 9ePedro HenriquesNo ratings yet
- Capacity UIC 406Document26 pagesCapacity UIC 406terre100% (1)
- En 16432-1 (2017) (E)Document8 pagesEn 16432-1 (2017) (E)PK0% (3)
- Uic 719 RPDFDocument117 pagesUic 719 RPDFjfloresf1No ratings yet
- prEN 16432-1 (2015) (E) PDFDocument6 pagesprEN 16432-1 (2015) (E) PDFAntnio50% (2)
- E600 PDFDocument15 pagesE600 PDFVadimNo ratings yet
- Slab Track On Different SubgradesDocument9 pagesSlab Track On Different SubgradesfranalhamaNo ratings yet
- Rui Calcada, Raimundo Delgado, Antonio Campos e Matos, Jose Maria Goicolea, Felipe Gabaldon-Track-Bridge Interaction On High-Speed Railways - Selected and ReviseDocument210 pagesRui Calcada, Raimundo Delgado, Antonio Campos e Matos, Jose Maria Goicolea, Felipe Gabaldon-Track-Bridge Interaction On High-Speed Railways - Selected and ReviseDevdattaNo ratings yet
- Track Modulus 7 PDFDocument12 pagesTrack Modulus 7 PDFMarius DiaconuNo ratings yet
- UIC Ballastless TrackDocument47 pagesUIC Ballastless TrackShikhar Singh100% (3)
- Everything You Need to Know About Railway Track StructuresDocument6 pagesEverything You Need to Know About Railway Track StructuresJoseEdgarNolascoLucesNo ratings yet
- Prediction of Permanent Deformation in Railway TrackDocument290 pagesPrediction of Permanent Deformation in Railway TrackAbu AimonNo ratings yet
- FASTENINGS IDENTIFICATIONDocument6 pagesFASTENINGS IDENTIFICATIONmirakel000No ratings yet
- 520EDocument67 pages520EminchanmonNo ratings yet
- Pandrol High-SpeedDocument24 pagesPandrol High-SpeedCuong H NguyenNo ratings yet
- Korea High Speed Rail Constructionand Technology AdvancesDocument95 pagesKorea High Speed Rail Constructionand Technology AdvancesAshok KumarNo ratings yet
- BS en 13231-1-2013Document34 pagesBS en 13231-1-2013TAHER AMMAR100% (3)
- High Speed Railway Lines - enDocument53 pagesHigh Speed Railway Lines - enaleitaosilva100% (3)
- A Guide To Track Stiffness Final Reviewr11Document55 pagesA Guide To Track Stiffness Final Reviewr114493464No ratings yet
- I S En13231-3-2012Document8 pagesI S En13231-3-2012Ali BdaNo ratings yet
- High Speed Rail ReportDocument56 pagesHigh Speed Rail ReportABC News Online100% (1)
- Ballastless Track - Superstructure TrackopediaDocument9 pagesBallastless Track - Superstructure TrackopediaSahan100% (1)
- Din en 13848-2Document37 pagesDin en 13848-2Khalid Hashme0% (1)
- Indonesian Railway Technical Standard on Track Structure DesignDocument41 pagesIndonesian Railway Technical Standard on Track Structure DesignLatifa Pradipta100% (1)
- Ballastless TracksDocument20 pagesBallastless TracksYacoub Cheikh67% (3)
- UIC 778 4R Defects in Railway BridgesDocument32 pagesUIC 778 4R Defects in Railway BridgesJamie MooreNo ratings yet
- Crossing and Design of Turnout PDFDocument34 pagesCrossing and Design of Turnout PDFAnu VishnuNo ratings yet
- Rail Fastening System Technical SpecificationDocument17 pagesRail Fastening System Technical SpecificationIrwan Joe100% (4)
- NEW LINES FOR SPEEDS OF 300 – 350 KM/HDocument16 pagesNEW LINES FOR SPEEDS OF 300 – 350 KM/Hv4lkr3y100% (1)
- Conception of Buffer Stop Blocks: Miguel R. BugarínDocument20 pagesConception of Buffer Stop Blocks: Miguel R. Bugarínruby100% (1)
- High Speed Rail - Review of The EvidenceDocument30 pagesHigh Speed Rail - Review of The EvidenceHighSpeedRailNo ratings yet
- BS en 14587-2Document44 pagesBS en 14587-2rohita kumar dah100% (3)
- En 15273-3 Cen FVDocument171 pagesEn 15273-3 Cen FVSamuel Carlos Sanjuán Torres100% (1)
- DD ENV 13481-6 - 2002 - Special Fastening Systems For Attenuation of VibrationDocument24 pagesDD ENV 13481-6 - 2002 - Special Fastening Systems For Attenuation of VibrationAnoy100% (1)
- FprEN 13848-1Document48 pagesFprEN 13848-1Dragana Tranavac100% (1)
- 2 Track - Monitoring PDFDocument129 pages2 Track - Monitoring PDFhemanta92No ratings yet
- Sparge o MetriDocument0 pagesSparge o MetrisaospieNo ratings yet
- NRL2TRK2102 PDFDocument123 pagesNRL2TRK2102 PDFREHAZ100% (1)
- Uic 866-O:1985Document19 pagesUic 866-O:1985Irwan Joe100% (1)
- c4r - d111 - Design Requirements and Improved Guidelines v1.1 - Public-2 PDFDocument93 pagesc4r - d111 - Design Requirements and Improved Guidelines v1.1 - Public-2 PDFGonzaloNo ratings yet
- LRFD Accelerated Bridge ConstructionDocument21 pagesLRFD Accelerated Bridge ConstructionJhon Escobar0% (1)
- Itu-T: Link Capacity Adjustment Scheme (LCAS) For Virtual Concatenated SignalsDocument38 pagesItu-T: Link Capacity Adjustment Scheme (LCAS) For Virtual Concatenated SignalsAnkur ShuklaNo ratings yet
- Guard/Check Rails, Buffer Stops and DerailsDocument12 pagesGuard/Check Rails, Buffer Stops and DerailsEmilyNo ratings yet
- E505x1 Projektni Gabariti Za Vozna SredstvaDocument121 pagesE505x1 Projektni Gabariti Za Vozna SredstvaDragan NedićNo ratings yet
- Mobile Messaging Technologies and Services: SMS, EMS and MMSFrom EverandMobile Messaging Technologies and Services: SMS, EMS and MMSRating: 5 out of 5 stars5/5 (2)
- Uic 506Document59 pagesUic 506Vadim100% (4)
- Static loading diagrams for rail structuresDocument15 pagesStatic loading diagrams for rail structuresVadim100% (1)
- UIC code 700 classification of railway lines and load limits for wagonsDocument28 pagesUIC code 700 classification of railway lines and load limits for wagonsMontserrat BustiosNo ratings yet
- E600 PDFDocument15 pagesE600 PDFVadimNo ratings yet
- UIC 505-4 4th Edition, November 2007Document40 pagesUIC 505-4 4th Edition, November 2007VadimNo ratings yet
- Uic 505 Rolling StockDocument122 pagesUic 505 Rolling StockJose Saravia67% (3)
- UIC code 700 classification of railway lines and load limits for wagonsDocument28 pagesUIC code 700 classification of railway lines and load limits for wagonsMontserrat BustiosNo ratings yet
- JAN LOHFELDT vs. NEDBANK LTD - Cape Town High Court Judge Goliath (24.02.2014) & Judge Zondi (25.02.2014)Document24 pagesJAN LOHFELDT vs. NEDBANK LTD - Cape Town High Court Judge Goliath (24.02.2014) & Judge Zondi (25.02.2014)willNo ratings yet
- Audit Reveals Optimization Opportunities for Cement Ball Mill SystemDocument19 pagesAudit Reveals Optimization Opportunities for Cement Ball Mill SystemVijay Bhan100% (2)
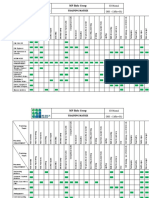
- MP Birla Group: Training MatrixDocument3 pagesMP Birla Group: Training MatrixAprilia kusumaNo ratings yet
- Comp7 - Answer Key - Dec. Exam - 1st SetDocument2 pagesComp7 - Answer Key - Dec. Exam - 1st SetHazel Joy LusellaNo ratings yet
- PHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionDocument2 pagesPHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionabuzarNo ratings yet
- 74HCT259D 8-Bit Addressable Latch DATA SHEETDocument11 pages74HCT259D 8-Bit Addressable Latch DATA SHEETMarc BengtssonNo ratings yet
- Actividad 3.1B-Xport-Model-Exercises-SCMDocument5 pagesActividad 3.1B-Xport-Model-Exercises-SCMDante Rivera SalinasNo ratings yet
- Bep Rev.c-New 20 MLD WTP, NathavaliDocument380 pagesBep Rev.c-New 20 MLD WTP, NathavaliAnonymous 7l8AIyq2No ratings yet
- Intelligence, Reasoning, Creativity, and WisdomDocument3 pagesIntelligence, Reasoning, Creativity, and WisdomSammy DeeNo ratings yet
- Incorrect Fuel Level Indication RepairDocument3 pagesIncorrect Fuel Level Indication RepairBogdan StefanNo ratings yet
- Steam TurbineDocument25 pagesSteam TurbineIshan JunejaNo ratings yet
- Mibk - TDS PDFDocument3 pagesMibk - TDS PDFMardianus U. RihiNo ratings yet
- Laplace Transform AssignmentDocument1 pageLaplace Transform AssignmentMohamad DuhokiNo ratings yet
- E5971 m4n68t-m Series ManualDocument0 pagesE5971 m4n68t-m Series ManualcamiloelosadaNo ratings yet
- MSE Admission and Degree RequirementsDocument6 pagesMSE Admission and Degree Requirementsdeathbuddy_87No ratings yet
- An Antarasiddhi, The First Independent Treatise: Masahiro InamiDocument19 pagesAn Antarasiddhi, The First Independent Treatise: Masahiro InamiFengfeifei2018No ratings yet
- Sir ClanDocument109 pagesSir ClanJames AbendanNo ratings yet
- 2 Linking Operations To Finance and ProductivityDocument14 pages2 Linking Operations To Finance and ProductivityAidan HonnoldNo ratings yet
- 405 Econometrics Odar N. Gujarati: Prof. M. El-SakkaDocument27 pages405 Econometrics Odar N. Gujarati: Prof. M. El-SakkaKashif KhurshidNo ratings yet
- Curriculum Vitae of Masilo ModibaDocument11 pagesCurriculum Vitae of Masilo Modibalevy2011No ratings yet
- Operation Manual: Impedance Audiometer AT235hDocument102 pagesOperation Manual: Impedance Audiometer AT235hmendezoswaldoNo ratings yet
- 6013 GCS-CONTROLS enDocument5 pages6013 GCS-CONTROLS enMuhammad SyaqirinNo ratings yet
- Week 2 - Risk AssessmentDocument35 pagesWeek 2 - Risk AssessmentTahir BashirNo ratings yet
- Chapter 4: Input/Output Programming of 8051 CPUDocument7 pagesChapter 4: Input/Output Programming of 8051 CPUIsmailNo ratings yet
- Astm F477-08Document4 pagesAstm F477-08ALARCONISTANo ratings yet
- Op-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsDocument5 pagesOp-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsYuvaraj ShanNo ratings yet
- Barrett Firearms - REC10 - Operators Manual 8.5x5.5 ALL REVB 17278Document22 pagesBarrett Firearms - REC10 - Operators Manual 8.5x5.5 ALL REVB 17278Ricardo C TorresNo ratings yet
- Basic-Engineering - Electrical EngineeringDocument227 pagesBasic-Engineering - Electrical EngineeringE-m FunaNo ratings yet
- Mathematics: Full Marks Zero Marks: 0 in All Other CasesDocument31 pagesMathematics: Full Marks Zero Marks: 0 in All Other CasesAbhishek KumarNo ratings yet