You might also like
- D&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFDocument191 pagesD&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFIgnacio Peralta93% (15)
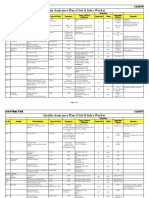
- Quality Assurance Plan - CivilDocument11 pagesQuality Assurance Plan - CivilDeviPrasadNathNo ratings yet
- Math C4 PracticeDocument53 pagesMath C4 PracticeMoustafa SohdyNo ratings yet
- Chapter 13 Vector FunctionsDocument44 pagesChapter 13 Vector Functionsdharmendra choudharyNo ratings yet
- Solution Real Analysis Folland Ch3Document16 pagesSolution Real Analysis Folland Ch3Tan ZhangNo ratings yet
- 116 hw1Document5 pages116 hw1thermopolis3012No ratings yet
- Problems Metric SpacesDocument15 pagesProblems Metric Spacesmarina_bobesiNo ratings yet
- hw10 (Do Carmo p.260 Q1 - Sol) PDFDocument2 pageshw10 (Do Carmo p.260 Q1 - Sol) PDFjulianli0220No ratings yet
- Trig-PreCalculus Summer Review Worksheet - Answer KeyDocument2 pagesTrig-PreCalculus Summer Review Worksheet - Answer KeyfranklinmanlapaoNo ratings yet
- Real Analysis - Homework Solutions: Chris Monico, May 2, 2013Document37 pagesReal Analysis - Homework Solutions: Chris Monico, May 2, 2013gustavoNo ratings yet
- A Course in Math Bio SolDocument63 pagesA Course in Math Bio SolItzalá Mendoza100% (10)
- Lecture09 AfterDocument31 pagesLecture09 AfterLemon SodaNo ratings yet
- Ryff's Six-Factor Model of Psychological Well-BeingDocument7 pagesRyff's Six-Factor Model of Psychological Well-BeingYogi Sastrawan100% (1)
- Introduction To Koopman Operator Theory of Dynamical SystemsDocument23 pagesIntroduction To Koopman Operator Theory of Dynamical SystemsJimiao ZhangNo ratings yet
- MIT Métodos MatemáticosDocument136 pagesMIT Métodos MatemáticosEsthefano Morales CampañaNo ratings yet
- 3.1 Least-Squares ProblemsDocument28 pages3.1 Least-Squares ProblemsGabo GarcíaNo ratings yet
- BanachDocument18 pagesBanachGiovanny Der KaiserNo ratings yet
- Problem Sets ALL PDFDocument34 pagesProblem Sets ALL PDFLeroy ChengNo ratings yet
- Introduction To Manifolds - Solutions To Selected Homework ProblemsDocument8 pagesIntroduction To Manifolds - Solutions To Selected Homework ProblemsVladimir EgorovNo ratings yet
- Market Structure and TrendDocument10 pagesMarket Structure and TrendbillNo ratings yet
- Dreizler EDocument265 pagesDreizler ERobis OliveiraNo ratings yet
- Metric Spaces PDFDocument33 pagesMetric Spaces PDFmatty20113No ratings yet
- Machine Tools PDFDocument57 pagesMachine Tools PDFnikhil tiwariNo ratings yet
- L1 Functions and Its NotationDocument16 pagesL1 Functions and Its NotationMiko2014No ratings yet
- Introduction To Metric SpacesDocument15 pagesIntroduction To Metric Spaceshyd arnes100% (1)
- Probability and Measure TheoryDocument198 pagesProbability and Measure TheoryforfucksakepleaseNo ratings yet
- PC300-8 New ModelDocument22 pagesPC300-8 New Modeljacklyn ade putra100% (2)
- Metric SpacesDocument42 pagesMetric SpacesAmol MittalNo ratings yet
- Folland Real Analysis Solution Chapter 2 IntegrationDocument6 pagesFolland Real Analysis Solution Chapter 2 IntegrationEdissonArcosNo ratings yet
- Shivam PDFDocument2 pagesShivam PDFGAurav JOshiNo ratings yet
- EE 769 Introduction To Machine Learning: Sheet 4 - 2020-21-2 Linear ClassificationDocument4 pagesEE 769 Introduction To Machine Learning: Sheet 4 - 2020-21-2 Linear ClassificationANURAG DIXITNo ratings yet
- Greatest Integer FunctionDocument6 pagesGreatest Integer FunctionKushal ParikhNo ratings yet
- Dilla University: Linear Algebra Ii (Math 2042)Document161 pagesDilla University: Linear Algebra Ii (Math 2042)HassenNo ratings yet
- Interior, Closed, ClosureDocument17 pagesInterior, Closed, ClosureSURESH KANNANNo ratings yet
- Complex 6Document70 pagesComplex 6Halis AlacaogluNo ratings yet
- Inequalitiess CAT.Document6 pagesInequalitiess CAT.abdull198No ratings yet
- Set Theory Only QuestionsDocument3 pagesSet Theory Only QuestionsSrushti MalleshNo ratings yet
- Application and Biodata Form GCWUFDocument6 pagesApplication and Biodata Form GCWUFali razaNo ratings yet
- S2 Maths ModelDocument24 pagesS2 Maths Modeljames alexanderNo ratings yet
- HL1Document74 pagesHL1Ahmad100% (1)
- Sma206 2008 Sem2 Supplementary ExamDocument3 pagesSma206 2008 Sem2 Supplementary ExamGeorge MSenoirNo ratings yet
- Functional Analysis - Manfred Einsiedler - Exercises Sheets - 2014 - Zurih - ETH PDFDocument55 pagesFunctional Analysis - Manfred Einsiedler - Exercises Sheets - 2014 - Zurih - ETH PDFaqszaqszNo ratings yet
- Unit III Maths 3Document53 pagesUnit III Maths 3gkk001No ratings yet
- Notes Real AnalysisDocument91 pagesNotes Real AnalysisCarlos MartinezNo ratings yet
- NM Unit - 3 (Notes) 31.8.20Document53 pagesNM Unit - 3 (Notes) 31.8.20Ax100% (1)
- Problems - Measure TheoryDocument16 pagesProblems - Measure TheoryShivam kumar agrawal100% (1)
- Tutorial Letter 201/1/2013: Calculus ADocument9 pagesTutorial Letter 201/1/2013: Calculus AKhathutshelo KharivheNo ratings yet
- Homework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27Document6 pagesHomework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27ra100% (1)
- History Fractional CalculusDocument36 pagesHistory Fractional CalculusAnonymous wJhO5dS9XzNo ratings yet
- MATH 2940 Homework 1 Solution Prof. TownsendDocument6 pagesMATH 2940 Homework 1 Solution Prof. TownsendTasty SeafoodNo ratings yet
- Grade 12th Maths WorksheetDocument7 pagesGrade 12th Maths WorksheetABCD 1234No ratings yet
- Log UnacademyDocument18 pagesLog UnacademyMayank Goyal100% (1)
- Tutorial Letter 201/1/2017: Calculus ADocument10 pagesTutorial Letter 201/1/2017: Calculus AKhathutshelo KharivheNo ratings yet
- Mechanics by Sir Nouman Siddique PDFDocument57 pagesMechanics by Sir Nouman Siddique PDFBint E ShafiqueNo ratings yet
- Today's Calculation of IntegralDocument84 pagesToday's Calculation of IntegralRhey LuceroNo ratings yet
- Introduction To Lie Algebras CorrectionsDocument5 pagesIntroduction To Lie Algebras CorrectionsMihai Bărbulescu100% (1)
- Functions of Several VariablesDocument4 pagesFunctions of Several VariablesKonal ShahNo ratings yet
- Weatherwax Leveque SolutionsDocument126 pagesWeatherwax Leveque SolutionshahahihiNo ratings yet
- Sample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsDocument10 pagesSample Final Examination Questions IE406 - Introduction To Mathematical Programming Dr. RalphsLuis IvanNo ratings yet
- Solutions To Mathematics 17 Exercises On Systems of Equations PDFDocument6 pagesSolutions To Mathematics 17 Exercises On Systems of Equations PDFMichael Christian BaysauliNo ratings yet
- Math207 HW3Document2 pagesMath207 HW3PramodNo ratings yet
- HW10 SolDocument7 pagesHW10 SolVictor Valdebenito100% (1)
- Cube Difference Labeling of Theta GraphsDocument4 pagesCube Difference Labeling of Theta GraphsAnonymous izrFWiQ100% (1)
- PROMYS India 2024 ApplicationDocument4 pagesPROMYS India 2024 ApplicationChandan kumar MohantaNo ratings yet
- Newton - Gregory Formula For Forward InterpolationDocument1 pageNewton - Gregory Formula For Forward Interpolationsharad94210No ratings yet
- Real Analysis Problems - Cristian E. GutierrezDocument23 pagesReal Analysis Problems - Cristian E. GutierrezSanotestNo ratings yet
- Advanced Mathematical Analysis: DraftDocument8 pagesAdvanced Mathematical Analysis: DraftParthasarathi MondalNo ratings yet
- Metric Spaces: 1.1 Definition and ExamplesDocument103 pagesMetric Spaces: 1.1 Definition and ExamplesNguyễn Quang HuyNo ratings yet
- 111107111 (1)Document3 pages111107111 (1)GAurav JOshi0% (1)
- My Result 5th SemDocument2 pagesMy Result 5th SemGAurav JOshiNo ratings yet
- Course Code: DX DX DX X A X A A XDocument2 pagesCourse Code: DX DX DX X A X A A XGAurav JOshiNo ratings yet
- B.Sc. Hons. Mathematics PDFDocument63 pagesB.Sc. Hons. Mathematics PDFvishwas gaurNo ratings yet
- SAT Sample Paper 1Document24 pagesSAT Sample Paper 1amankapoor31No ratings yet
- B.Sc. Hons. Mathematics PDFDocument63 pagesB.Sc. Hons. Mathematics PDFvishwas gaurNo ratings yet
- B.Sc. Hons. Mathematics PDFDocument63 pagesB.Sc. Hons. Mathematics PDFvishwas gaurNo ratings yet
- Metric SpacesDocument34 pagesMetric SpacesScarlett Diaz100% (1)
- B.Sc. Hons. Mathematics PDFDocument63 pagesB.Sc. Hons. Mathematics PDFvishwas gaurNo ratings yet
- IntroAnalysis JohnHunter PDFDocument108 pagesIntroAnalysis JohnHunter PDFClaudio Ramón Rodriguez MondragónNo ratings yet
- 05 Real Analysis Basic ConceptsDocument25 pages05 Real Analysis Basic ConceptsKesavan SilambuNo ratings yet
- James KlotzDocument2 pagesJames KlotzMargaret ElwellNo ratings yet
- HSG Vs SonohysterographyDocument4 pagesHSG Vs Sonohysterography#15No ratings yet
- Learning Spanish - 1dDocument23 pagesLearning Spanish - 1dChima C. Ugwuegbu100% (1)
- Description About Moon: Earth SatelliteDocument6 pagesDescription About Moon: Earth SatellitePurva KhatriNo ratings yet
- How Do I Predict Event Timing Saturn Nakshatra PDFDocument5 pagesHow Do I Predict Event Timing Saturn Nakshatra PDFpiyushNo ratings yet
- Unit 6B - PassiveDocument18 pagesUnit 6B - PassiveDavid EstrellaNo ratings yet
- MultiZone Limitations and HintsDocument2 pagesMultiZone Limitations and HintsRubén Darío Becerra GalindoNo ratings yet
- Computer Science HandbookDocument50 pagesComputer Science HandbookdivineamunegaNo ratings yet
- Quadratic SDocument20 pagesQuadratic SAnubastNo ratings yet
- Catalog de Aparatura Si Instrumentar Veterinar Eikemeyer-GermaniaDocument336 pagesCatalog de Aparatura Si Instrumentar Veterinar Eikemeyer-GermaniaDr. Dragos CobzariuNo ratings yet
- Video ObservationDocument8 pagesVideo Observationapi-532202065No ratings yet
- Malaybalay CityDocument28 pagesMalaybalay CityCalvin Wong, Jr.No ratings yet
- Interceptor Specifications FinalDocument7 pagesInterceptor Specifications FinalAchint VermaNo ratings yet
- Evaluating Websites A Checklist - JOHN CARLO G. GAERLANDocument3 pagesEvaluating Websites A Checklist - JOHN CARLO G. GAERLANMarvin CincoNo ratings yet
- Design and Analysis of DC-DC Boost Converter: September 2016Document5 pagesDesign and Analysis of DC-DC Boost Converter: September 2016Anonymous Vfp0ztNo ratings yet
- Lesson 3 - Adaptation AssignmentDocument3 pagesLesson 3 - Adaptation AssignmentEmmy RoseNo ratings yet
- 4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Document4 pages4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Viet Quoc100% (1)
- Service M5X0G SMDocument98 pagesService M5X0G SMbiancocfNo ratings yet
- Lab Activity 5Document5 pagesLab Activity 5Jasmin CeciliaNo ratings yet
- Rfis On Formliners, Cover, and EmbedmentsDocument36 pagesRfis On Formliners, Cover, and Embedmentsali tahaNo ratings yet
- Electromyostimulation StudyDocument22 pagesElectromyostimulation StudyAgnes Sophia PenuliarNo ratings yet
- ETSI EG 202 057-4 Speech Processing - Transmission and Quality Aspects (STQ) - Umbrales de CalidaDocument34 pagesETSI EG 202 057-4 Speech Processing - Transmission and Quality Aspects (STQ) - Umbrales de Calidat3rdacNo ratings yet
- TM9-1904 - Ammunition Inspection Guide - 1944 PDFDocument414 pagesTM9-1904 - Ammunition Inspection Guide - 1944 PDFhodhodhodsribdNo ratings yet