Professional Documents
Culture Documents
05.1 - Cinétique Des Systèmes Matériels
Uploaded by
AlaealeaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
05.1 - Cinétique Des Systèmes Matériels
Uploaded by
AlaealeaCopyright:
Available Formats
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
CINETIQUE
DES SYSTEMES MATERIELS
Plan (Cliquer sur le titre pour accéder au paragraphe)
**********************
1 Conservation de la masse d’un système matériel en mécanique classique ............................................1
1.1 Système matériel de solides............................................................................................................1
1.2 Masse d’un système matériel E ......................................................................................................2
1.3 Principe de conservation de la masse en mécanique classique ......................................................2
2 Centre d’inertie d’un système matériel...................................................................................................3
2.1 Définition........................................................................................................................................3
2.2 Détermination directe de G ............................................................................................................3
2.3 Détermination pratique du centre d’inertie d’un système matériel E.............................................3
3 Torseur cinétique d’un système matériel E en mouvement par rapport à un repère R...........................6
3.1 Définition........................................................................................................................................6
r
3.2 Calcul de la résultante cinétique P(E / R ) ....................................................................................6
3.3 Calcul du moment cinétique, au point A, du système matériel E dans son mouvement par rapport
àR 8
3.4 Matrice d’inertie du solide S, en un point A, exprimé dans un repère Rs lié à S ...........................9
3.5 Théorème de Huyghens ................................................................................................................12
3.6 Moments d’inertie particuliers .....................................................................................................16
4 Energie cinétique d’un système matériel E, en mouvement par rapport à un repère R........................18
4.1 Définition......................................................................................................................................18
4.2 Calcul de l’énergie cinétique du système matériel E, en mouvement relativement au repère R..18
5 Torseur dynamique d’un système matériel E en mouvement par rapport à un repère R .....................20
5.1 Définition......................................................................................................................................20
r
5.2 Calcul de la résultante dynamique R d ( E / R ) ............................................................................21
5.3 Calcul du moment dynamique, au point A, du système matériel E dans son mouvement par
rapport à R 22
**********************
1 CONSERVATION DE LA MASSE D’UN SYSTEME MATERIEL EN
MECANIQUE CLASSIQUE
1.1 Système matériel de solides
1.1.1 SOLIDE INDEFORMABLE
Comme nous l’avons vu en Cinématique, un solide indéformable S est un ensemble de points tels que la
distance de deux quelconques de ces points reste constante au cours du mouvement du solide.
→
∀A ∈ S, ∀B ∈ S, AB = c ste
Page 1 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
n
1.1.2 SYSTEME MATERIEL DE SOLIDES E = US i
i =1
En Dynamique, nous étudierons principalement le comportement des systèmes matériels de solides
modélisables par des mécanismes à chaînes simples ou complexes, ouvertes ou fermées.
Les solides sont considérés comme indéformables. Les liaisons reliant les solides sont considérées
comme réelles (éventuellement avec frottement).
1.2 Masse d’un système matériel E
1.2.1 DEFINITION
A toute partie Ei(t) du système matériel E(t), on associe une mesure positive et additive notée m E i ( t )
telle que :
m[E i ( t )] ≥ 0
[ ] [
m E i ( t ) U E j ( t ) = m[E i ( t )] + m E j ( t ) ] avec E i ( t ) ∩ E j ( t ) = ∅
m[E ( t )] = ∫ dm
E(t)
1.2.2 CONSEQUENCE
n
r
Soit E(t) un système matériel en mouvement par rapport à un repère R tel que E ( t ) = US i . Si ϕ[P( t )]
i =1
r
est une fonction vectorielle définie pour tout point P de E(t) tel que : P( t ) → ϕ[P( t )] alors on démontre que :
r n
r
∫ ϕ [P ( t ) ] dm = ∑ ∫ ϕ[P(t )] dm (1)
E(t ) i =1 Si
1.3 Principe de conservation de la masse en mécanique classique
1.3.1 SYSTEME MATERIEL FERME
La masse d’un système matériel fermé est constante au cours du temps .
d [m ( E ( t )) ]
= 0 ⇒ m ( E ( t )) = m ( E ) = C te
dt
1.3.2 CONSEQUENCE
Soitr E(t) un système matériel en mouvement par rapport à un repère R .
Si ϕ P( t ) est une fonction vectorielle continûment dérivable par rapport à t, définie pour tout point P de
E(t), on démontre que:
d r d r
∫ ϕ[P( t )]dm = ∫ ϕ[P( t )] dm (2)
E(t ) R
dt E ( t ) dt
R
Page 2 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
2 CENTRE D’INERTIE D’UN SYSTEME MATERIEL
2.1 Définition
Soit E(t) la configuration, à l’instant t, du système matériel E dans son mouvement par rapport au repère
R.
Le centre d’inertie du système matériel E, noté G, est donné par la relation :
→ r
∫ GP
E(t)
dm = 0 (3)
2.2 Détermination directe de G
2.2.1 EXISTENCE DE G
→ → →
Posons GP = AP− AG où A désigne un point quelconque, d'après (3) on a :
→ →
∫
E(t)
AP dm = ∫ AG dm
E( t )
→ → →
or GP = AP− AG est indépendant de m et t, donc :
→ →
∫ AP dm = AG
E(t ) E(t)
∫ dm
soit
→ 1 →
m(E) E∫( t )
AG = AP dm (4)
2.2.2 UNICITE DE G
Soient G1 et G2 deux points vérifiant la relation (4)
→ 1 →
m(E ) E∫( t )
AG1 = AP dm
→ 1 →
m(E) E∫( t )
AG1 = AP dm
d’où
→ → r
AG 1 − AG 2 = 0
donc
G1 ≡ G 2 ≡ G
2.3 Détermination pratique du centre d’inertie d’un système matériel E
2.3.1 LE SYSTEME MATERIEL E EST CONSTITUE DE N SOLIDES SI
Page 3 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
On a donc
n
E = U Si
i =1
et
n n
m(E) = ∑ m(Si ) = ∑ m i
i =1 i =1
si Gi désigne le centre d’inertie du solide Si
si mi désigne la masse du solide Si
D’après (4)
→ 1 →
AG = ∫ AP dm
m(E ) E ( t )
D’après (1)
→ n
∑
i =1
∫ AP dm
→
iS
AG = n
∑ mi i =1
donc
n →
→ ∑ m i AG i
AG = i =1
n
(5)
∑m
i =1
i
G est donc le barycentre de tous les points Gi affectés des masses mi
2.3.2 LE SYSTEME MATERIEL E EST CONSTITUE D’UN SEUL SOLIDE S
2.3.2.1 Définition
D’après (4)
→ 1 →
m(S) S∫( t )
AG = AP dm
r r r
Si on pose R = (A, x, y, z)
→ r r r
on a AG = x G x + y G y + z G z
r r r
et AP = xx + yy + zz
il vient:
∫ xdm ∫ ydm ∫ zdm
xG = yG = zG =
E(t ) E(t ) E(t )
(6)
m m m
2.3.2.2 Symétrie matérielle du solide S
La détermination pratique su centre d'inertie d'un solide S passe par la prise en compte des symétries
matérielles du solide S.
Page 4 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
Si xAy est plan de symétrie du solide S, alors :
∫ zdm
zG = =0
E(t)
Si xAz est plan de symétrie du solide S, alors :
∫ ydm
yG = =0
E(t)
Si yAz est plan de symétrie du solide S, alors :
∫ xdm
xG = =0
E(t )
m
Si (A,z) est axe de symétrie de révolution, alors :
∫ xdm
xG = =0
E(t )
m
∫ ydm
yG = =0
E(t)
Page 5 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
3 TORSEUR CINETIQUE D’UN SYSTEME MATERIEL E EN
MOUVEMENT PAR RAPPORT A UN REPERE R
3.1 Définition
On appelle torseur cinétique, au point A, du système matériel E(t) en mouvement par rapport au repère R,
le torseur noté {C( E / R )}A défini par :
Rr r r
C ( E / R ) = P ( E / R ) = ∫ (P / R )dm
V
E(t )
{C(E / R )} = (8)
r → r
σ ( A , E / R ) = ∫E ( t ) ∧ V(P / R )dm
AP
r
le vecteur P(E / R ) est la résultante cinétique du système matériel E(t) en mouvement par rapport au
repère R.
r
le vecteur σ(A, E / R ) est le moment cinétique du système matériel E(t) en mouvement par rapport au
repère R.
Vérifions que {C(E / R )}est bien un torseur.
r
Calculons σ(B, E / R ) , B étant un point quelconque.
r → r
σ(B, E / R ) = ∫ BP ∧
P∈E ( t )
V (P / R )dm
r → r → r
σ(B, E / R ) = ∫ BA ∧
P∈E ( t )
V (P / R )dm + ∫ AP ∧
P∈E ( t )
V (P / R )dm
r → r r
σ(B, E / R ) = BA ∧ ∫ V(P / R )dm + σ(A, E / R )
P∈E ( t )
d’après (6)
soit
r r → r
σ(B, E / R ) = σ(A, E / R ) + BA ∧ P(E / R ) (9)
{C(E / R )}est donc bien un torseur.
r
3.2 Calcul de la résultante cinétique P(E / R )
r
3.2.1 CALCUL DIRECT DE P(E / R )
r r
P(E / R ) = ∫ V(P / R )dm
E(t )
Page 6 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
si O est un point fixe dans R,
r →
d OP
P(E / R ) = ∫ dm
dt
E
R
d'après (2),
r d →
P(E / R ) = ∫ OPdm
dt E R
d'après (4),
r d →
P(E / R ) = m OG
dt R
d'après (2),
r r
P(E / R ) = mV(G / R ) (10)
où m désigne la masse du système matériel E
G désigne le centre d’inertie du système matériel E.
r
3.2.2 CALCUL PRATIQUE DE P(E / R )
3.2.2.1 Le système matériel est constitué d’un seul solide S
r r
P(S / R ) = mV(G / R ) (11)
où m désigne la masse du solide S
G désigne le centre d’inertie du solide S
3.2.2.2 Le système matériel est constitué de n solides Si
r r
P(E / R ) = ∫ V(P / R )dm
E(t )
d’où
r n r
P(E / R ) = ∑ ∫ V(P / R )dm
Si
i =1
donc
r n r
P(E / R ) ∑ P(Si / R )
=
i =1
soit
r n r
P ( E / R ) = ∑ m i V (G i / R ) (12)
i =1
où mi désigne la masse du solide Si
Gi désigne le centre d’inertie du solide Si
r
Remarque: Le vecteur P( E / R ) est aussi appelé vecteur quantité de mouvement du système matériel E en
mouvement par rapport au repère R.
Page 7 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
3.3 Calcul du moment cinétique, au point A, du système matériel E dans son
mouvement par rapport à R
3.3.1 LE SYSTEME MATERIEL EST CONSTITUE DE N SOLIDES SI
r → r
σ(A, E / R ) = ∫ ∧ V(P / R )dm
AP
E(t )
d’après (1)
n → r
r
σ(A, E / R ) = ∑ ∫ AP∧ V(P / R )dm
S i
i =1
soit
r n
r
σ(A, E / R ) = ∑ σ(A, Si / R ) (13)
i =1
où
r
σ(A , S i / R ) désigne le moment cinétique, au point A, du solide Si dans son mouvement par rapport à R.
3.3.2 LE SYSTEME MATERIEL EST CONSTITUE D’UN SEUL SOLIDE S
r
3.3.2.1 Calcul direct de σ(A, S / R )
Ce calcul s'effectue en tenant compte des points suivants :
r
A désigne le point quelconque où est calculé σ(A, S / R ) . A peut être fixe ou mobile dans R..
B désigne un point particulier de S et P désigne un point courant de S.
r → r r →
r → r
σ(A, S / R ) = ∫ AP∧ V(P / R )dm σ(A, S / R ) = ∫ AP∧ V(B, S / R ) + PB∧ Ω(S / R ) dm B et P
S S
appartenant à S
r → r →
→ r
σ(A, S / R ) = ∫ AP∧ V(B, S / R )dm + ∫ AP∧ PB∧ Ω(S / R )dm
S S
→ → →
or AP = AB+ BP
donc :
r → r →
→ r
σ(A, S / R ) = ∫ AP dm ∧ V(B, S / R ) + ∫ AP∧ PB∧ Ω(S / R )dm
S S
→
→ r
+ ∫ BP∧ PB∧ Ω(S / R ) dm
S
Finalement :
r → r →
→ r
σ(A, S / R ) = m AG ∧ V(B / R ) + m AB∧ GB∧ Ω(S / R )
(14)
→
r →
+ ∫ BP∧ Ω(S / R ) ∧ BP dm
S
Page 8 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
r
Remarque: Bien que la relation (14) donne l'expression du vecteur σ(A, S / R ) , ce dernier n'est jamais
r
calculé par la relation (14). Dans la pratique, on calcule σ(A, S / R ) grâce aux trois cas particuliers détaillés ci
dessous.
r
3.3.2.2 Calcul pratique de σ(A, S / R )
• Si B est confondu avec A
r
Le point de calcul A de σ(A, S / R ) est le point B où est connu l'opérateur
r r
d'inertie J (B, Ω(S / R )) , soit :
r → r →
r →
σ(A, S / R ) = m AG ∧ V(A / R ) + ∫ AP∧ Ω(S / R ) ∧ APdm (15)
S
• Si B est confondu avec A fixe dans R
r
Le point de calcul A de σ(A, S / R ) est fixe dans R et est, de plus, le point B où
r r
est connu l'opérateur d'inertie J (B, Ω(S / R )) , soit :
r →
r →
σ(A, S / R ) = ∫ AP∧ Ω(S / R ) ∧ APdm (16)
S
• Si B est confondu avec G centre d’inertie de S
Le centre d'inertie G est le point B où est connu l'opérateur d'inertie
r r
J (B, Ω(S / R )) , soit :
r r → r
σ(A, S / R ) = σ(G, S / R ) + m AG ∧ V(G / R )
(17)
r →
r →
σ(G, S / R ) = ∫ GP ∧ Ω(S / R ) ∧ GP dm
S
3.4 Matrice d’inertie du solide S, en un point A, exprimé dans un repère Rs lié
àS
3.4.1 DEFINITION
Les expressions (15), (16) et (17) montrent l'existence de l’opérateur d’inertie du solide S, au point B,
r
appliqué au vecteur Ω(S / R ) .
r r →
r →
J (B, Ω(S / R )) = ∫ BP∧ Ω(S / R ) ∧ BPdm
S
Si on pose :
r r r
R S = (B, x S , y S , z S ) repère lié à S et,
r r r
B S = ( x S , y S , z S ) base associée à R S .
On peut écrire :
r r r r
Ω(S / R ) = px S + qy S + rz S
→ r r r
BP = xx S + yy S + zz S
Page 9 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
p x qz − ry
r →
Calculons Ω(S / R ) ∧ BP = q ∧ y = − pz + rx
r z py − qx
x qz − ry p( y 2 + z 2 ) − qxy − rxz
→ r →
et BP∧ Ω(S / R ) ∧ BP = y ∧ − pz + rx = − pxy + q ( x 2 + z 2 ) + ryz
z py − qx − pxz − qyz + r ( x 2 + y 2 )
BS
Si on pose:
(
A = ∫ y 2 + z 2 dm ) D = ∫ yzdm
B = ∫ (x )dm
S S
2
+z 2
E = ∫ xzdm (18)
C = ∫ (x )dm
S S
2
+ y2 F = ∫ xydm
S S
avec
r
A moment d’inertie du solide S, au point B, par rapport à l’axe (B, x S ) .
r
B moment d’inertie du solide S, au point B, par rapport à l’axe (B, y S ) .
r
C moment d’inertie du solide S, au point B, par rapport à l’axe (B, z S ) .
r r
D produit d’inertie du solide S, au point B, par rapport aux axes (B, y S ) et (B, z S )
r r
E produit d’inertie du solide S, au point B, par rapport aux axes (B, x S ) et (B, z S )
r r
F produit d’inertie du solide S, au point B, par rapport aux axes (B, x S ) et (B, y S )
On peut donc écrire :
A − F − E p
r r
J (B, Ω(S / R )) B = − F B − D q
S
− E − D C B r B
S S
soit
[ ]
r r r
J (B, Ω(S / R )) B = [I(B, S)]B Ω(S / R ) B (19)
S S S
où
[I(B, S)]BS désigne la matrice d’inertie, au point B, du solide S exprimée dans la base B S
[
r
]
Ω(S / R ) B désigne le vecteur rotation instantanée du solide S exprimée dans la base B S .
S
r r r
J (B, Ω(S / R )) B désigne l’opérateur d’inertie du solide S, au point B, appliqué au vecteur Ω(S / R ) ,
S
exprimé dans la base B S .
Page 10 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
3.4.2 FORME SIMPLIFIEE DE LA MATRICE D’INERTIE I( B, S) R
S
3.4.2.1 Symétrie matérielle du solide S
La détermination pratique de la matrice d'inertie du solide S passe par la prise en compte des symétries
matérielles du solide S.
• Si xsBys est plan de symétrie de S
∫ yzdm = 0 ⇒ D=0 A − F 0
S [I(B, S)]BS = − F B 0
∫ xzdm = 0
S
⇒ E=0
0 0 C B
S
• xsBzs est plan de symétrie de S
∫ xydm = 0 ⇒ F=0 A 0 − E
S [I(B, S)]BS = 0 B 0
∫ yzdm = 0
S
⇒ D=0
− E 0 C B
S
• ysBzs est plan de symétrie de S
∫ xydm = 0 ⇒ F=0 A 0 0
S [I(B, S)]BS = 0 B − D
∫ xzdm = 0
S
⇒ E=0
0 − D C B
S
• (B,zS) est axe de symétrie de révolution
Propriété n°1
∫ yzdm = 0 ⇒ D=0
S
∫ xzdm = 0 ⇒ E=0
S
∫ xydm = 0 ⇒ F=0
S
∫x 2
dm = ∫ y 2 dm ⇒ A=B
S S
soit
A 0 0
[I(B, S)]BS = 0 A 0
0 0 C B
S
Page 11 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
Propriété n° 2
r r r r r r
Soient R S = (B, x S , y S , z S ) et R = (B, x , y, z) deux repères liés à S tels que R se déduit de RS par une
rotation d’axe (B, zS).
Démontrons que :
[I(B, S)]BS = [I(B, S)]R y1 y0
Appelons P la matrice de passage de B dans BS x1
cos α − sin α 0
α
[P] = sin α cos α 0
0 0 1 z 0=z 1 x
[I(B, S)]B = [P] [I(B, S)]BS [P]
−1
cos α sin α 0 A 0 0 cos α − sin α 0
[I(B, S)]B = − sin α cos α 0 0 A 0 sin α cos α 0
0 0 1 0 0 C B 0 0 1
S
cos α sin α 0 A cos α A sin α 0
[I(B, S)]B = − sin α cos α 0 A sin α A cos α 0
0 0 1 0 0 C
A(cos 2 α + sin 2 α) 0 0
[I(B, S)]B = 0 A(cos α + sin α) 0
2 2
0 0 C
soit
[I(B, S)]B = [I(B, S)]BS
3.5 Théorème de Huyghens
3.5.1 OBJECTIF
Soit G le centre d’inertie du solide et soit A un point quelconque du solide S.
Le théorème de Huyghens permet de :
r
déterminer l’opérateur d’inertie du solide S, au point A, appliqué au vecteur unitaire u , noté
r r r
J [(A, u )]B = [I(A, S)]B [u ]B
S S S
r
connaissant l’opérateur d’inertie du solide S, au point G, appliqué au vecteur unitaire u , noté
r r r
J [(G, u )]B = [I(G, S)]B [u ]B
S S S
Page 12 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
3.5.2 ENONCE
r r r r →
r →
J [(A, u )]B = J [(G, u )]B + m AG ∧ Ω(S / R ) ∧ AG (20)
S S
soit
A A = A G + m( b 2 + c 2 ) D A = D G + mbc
B A = B G + m( a 2 + c 2 ) E A = E G + mac (21)
C A = C G + m( a 2 + b 2 ) FA = FG + mab
avec m masse du solide S
→ r r r
et GA = ax S + by S + cz S
3.5.3 DEMONSTRATIONS
3.5.3.1 Méthode directe
→ → →
Soit P un point courant du solide S, on a AP = AG + GP
r s → r →
J ( A, u ) = ∫S ∧ u ∧ APdm
AP
r s →
r →
→
r →
J ( A, u ) = ∫S AG ∧ u ∧ AG dm + ∫S GP ∧ u ∧ AG dm
→
r → →
r →
+ ∫ AP∧ u ∧ APdm + ∫S AG ∧ u ∧ GP dm
S
r s →
r →
→
r →
J (A, u ) = AG ∧ u ∧ AG ∫ dm + ∫S GP dm ∧ u ∧ AG
S
→
r → → r →
+ ∫ AP∧ u ∧ APdm + AG ∧ u ∧ ∫ GP dm
S S
or
→ r
∫ GP
S
dm = 0
donc
r r r r →
r →
J [(A, u )]R = J [(G, u )]R + m AG ∧ u ∧ AG
S S
r r r r
Appliquons l’équation (20) à x S dans la base ( x S , y S , z S )
Page 13 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
r r r r → r →
J [(A, x S )] = J [(G, x S )] + m AG ∧ x S ∧ AG
d’après (19) il vient :
AA AG a 1 a A G b2 + c2
− FA = − FG + m b ∧ 0 ∧ b = − FG + m − ab
− EA − EG c 0 c − E G − ac
soit
AA = AG + m( b 2 + c 2 )
FA = FG + mab
EA = EG + mac
Procédant de même avec :
r r r r → r →
J [(A, y S )] = J [(G, y S )] + m AG ∧ y S ∧ AG
on obtient:
BA = BG + m (a 2 + b 2 )
FA = FG + mab
DA = DG + mbc
Procédant de même avec :
r r r r → r →
J [(A, z S )] = J [(G, z S )] + m AG ∧ z S ∧ AG
on obtient:
CA = CG + m(b 2 + c 2 )
EA = EG + mac
DA = DG + mbc
Page 14 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
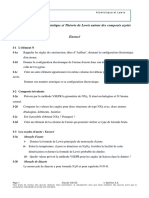
3.5.3.2 Méthode pratique.
zS
c
z A
P
G b
y
a
x
Par définition:
→ r → r
A A = ∫ (AP .y) 2 + (AP .z) 2 dm
S
soit
[
A A = ∫ ( y − b) 2 + (z − c) 2 dm ]
S
( )
A A = ∫ y + z dm − 2b ∫ ydm − 2c ∫ zdm + m(b 2 + c 2 )
2 2
S S S
or
∫ ydm = my
S
G =0
∫ zdm = mz
S
G =0
donc
A A = A G + m( b 2 + c 2 )
Par permutation circulaire, on trouve alors :
B A = B G + m( a 2 + c 2 )
C A = C G + m( a 2 + b 2 )
On procède de même pour le calcul de DA, EA, FA.
→ r → r
FA = ∫ (AP .x )(AP .y)dm
S
FA = ∫ [( y − b)( x − a )]dm
S
Page 15 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
FA = ∫ xydm − a ∫ ydm − b ∫ xdm + mab
S S S
or
∫ xdm = mx
S
G =0
∫ ydm = my
S
G =0
donc
FA = FG + mab
Par permutation circulaire, on trouve alors :
D A = D G + mbc
E A = E G + mac
3.6 Moments d’inertie particuliers
r 3.6.1 MOMENT D’INERTIE D’UN SOLIDE S, A L’INSTANT T, PAR RAPPORT A UN AXE
NOTE I ( A , u)
3.6.1.1 Définition r
Soit P un point courant de S et H la projection orthogonale de P la droite ( A , u) .
r r
Le moment d’inertie du solide S, à l’instant t, par rapport à l’axe ( A , u) noté I ( A , u) est :
r
I(A, u ) = ∫ PH 2 dm
S
r
3.6.1.2 Calcul pratique de I(A, u )
r → 2 → 2
I(A, u ) = ∫ PH dm = ∫ AP sin 2 αdm
S
r → 2 → 2 → 2 → r
I(A, u ) = ∫ (AP − (AP cos 2 α) dm = ∫ AP − (AP .u ) dm
S S
r →
→ r → r
I(A, u ) = ∫ AP .AP− u.(AP .u ) dm
S
r →
rr → r → r
I(A, u ) = ∫ AP .(u.u ) AP− (u. AP).u dm
S
r →
r → r r → → r →
I(A, u ) = ∫ AP .u ∧ (AP∧ u ) dm = u.∫ AP .AP∧ (u ∧ AP) dm
S S
Page 16 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
r r r r
I(A , u) = u. J (A , u) donc :
r t r r
I(A, u )= [u ]B [I(A, S)]B [u ]B (22)
où
t
[ur ]B r
désigne le vecteur uniligne u exprimé dans la base B
[ur ]B r
désigne le vecteur unicolonne u exprimé dans la base B
[I(A, S)]B désigne la matrice d’inertie du solide S, au point A, exprimée dans la base B.
3.6.2 MOMENT D’INERTIE D’UN SOLIDE S PAR RAPPORT A UN POINT O
Le moment d’inertie du solide S, à l’instant t, par rapport au point O noté IO est:
→ 2
I O = ∫ PO dm
S
soit
[ ]
I O = ∫ x 2 + y 2 + z 2 dm =
1
2
( A + B + C)
S
3.6.3 MOMENT D’INERTIE D’UN SOLIDE S PAR RAPPORT A UN PLAN
Le moment d’inertie du solide S, à l’instant t, par rapport au plan xOy est :
1
I Oyz = ∫ z 2 dm = ( A + B − C)
S
2
Le moment d’inertie du solide S, à l’instant t, par rapport au plan yOz est :
1
I Oyz = ∫ x 2 dm = ( − A + B + C)
S
2
Le moment d’inertie du solide S, à l’instant t, par rapport au plan xOz est :
1
I Oxz = ∫ y 2 dm = ( A − B + C)
S
2
Page 17 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
4 ENERGIE CINETIQUE D’UN SYSTEME MATERIEL E, EN
MOUVEMENT PAR RAPPORT A UN REPERE R
4.1 Définition
L’énergie cinétique du système matériel E, en mouvement relativement au repère R, notée T(E / R ) est:
1r
T(E / R ) = ∫ V 2 (P / R ) dm (23)
E
2
Remarques:
• T(E / R ) est un scalaire.
• Unité SI: Joule
4.2 Calcul de l’énergie cinétique du système matériel E, en mouvement
relativement au repère R
4.2.1 LE SYSTEME MATERIEL E EST CONSTITUE DE N SOLIDES SI
n
On a donc E = US i
i =1
d’après (1)
1r
n
T(E / R ) = ∑ ∫ V 2 (P / R )dm
i =1 Si 2
donc
n
T(E / R ) = ∑ T(S i / R ) (24)
i =1
4.2.2 LE SYSTEME MATERIEL E EST CONSTITUE D’UN SEUL SOLIDE S
4.2.2.1 Calcul direct de T(S / R )
Par définition,
1r
T(S / R ) = ∫ V 2 (P / R )dm
S
2
Si B est un point quelconque de S, on peut écrire :
r r 2
→
2T(S / R ) = ∫ V(B, S / R ) + PB∧ Ω(S / R ) dm
S
r r → r
2T(S / R ) = ∫ V 2 (B, S / R )dm + 2∫ V(B, S / R ).PB∧ Ω(S / R dm
S S
→ r
2
+ ∫S PB ∧ Ω (S / R ) dm
Page 18 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
r r → r
2T(S / R ) = mV 2 ( B, S / R ) + 2 mV( B, S / R ). GB∧ Ω(S / R )
r r r
+ Ω (S / R ). J B, Ω (S / R ) [ ]
Soit finalement,
1 r2 r → r
T(S / R ) = mV (B, S / R ) + mV(B, S / R ).GB∧ Ω(S / R )
2 (25)
+
1t r
2
[ ] r
[
Ω(S / R ) R [I(B, S)]R Ω(S / R ) R ]
4.2.2.2 Calcul pratique de T(S / R )
• S possède un point fixe A dans son mouvement par rapport à R
B≡A
T(S / R ) =
2
[
1t r
] r
[
Ω(S / R ) R [I(A, S)]R Ω(S / R ) R ] (26)
• S ne possède pas de point fixe dans son mouvement par rapport à R
B≡G
T(S / R ) =
1 r2
2
1t r
2
[ r
]
mV (B, S / R ) + Ω(S / R ) R [I(B, S)]R Ω(S / R ) R [ ] (27)
ou encore
T(S / R ) =
1
{V(S / R )}G ⊗ {C(S / R )}G (28)
2
avec
r
Ω(S / R )
{V(S / R )}G = r
V (G , S / R ) G
et
r r
P(S / R ) = mV(G / R )
{C(S / R )}G = r r
[
σ(G, S / R ) = [I(G, S)]R Ω(S / R ) G ]
continuer ici
Page 19 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
5 TORSEUR DYNAMIQUE D’UN SYSTEME MATERIEL E EN
MOUVEMENT PAR RAPPORT A UN REPERE R
5.1 Définition
On appelle torseur dynamique, au point A, du système matériel E en mouvement par rapport au repère R,
le torseur noté {D(E / R )}A tel que:
R r r
d ( E / R ) = ∫ Γ (P / R )dm
E(t)
{D(E / R )}A =
r → r
δ ( A , E / R ) = ∫ AP ∧ Γ (P / R )dm
E(t)
r
le vecteur R d ( E / R ) est la résultante dynamique du système matériel E en mouvement par rapport au
repère R.
r
le vecteur δ(A , E / R ) est le moment dynamique du système matériel E en mouvement par rapport au
repère R.
Démontrons que {D( E / R )} est bien un torseur.
A
r
Calculons δ( B, E / R ) , B étant un point quelconque.
r → r
δ( B, E / R ) = ∫ BP ∧ Γ ( P / R )dm
E
r → r → r
δ( B, E / R ) = ∫ BA ∧ Γ ( P / R )dm + ∫ AP∧ Γ ( P / R )dm
E E
r → r r
δ( B, E / R ) = BA ∧ ∫ Γ ( P / R )dm + δ (A , E / R )
E
soit
r r → r
δ ( B, E / R ) = δ(A , E / R ) + BA ∧ R d ( E / R )
{D( E / R)}A est donc bien un torseur.
Page 20 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
r
5.2 Calcul de la résultante dynamique R d ( E / R )
r
5.2.1 CALCUL DIRECT DE R d ( E / R )
Par définition,
r r
R d ( E / R) = ∫ Γ ( P / R)dm
E( t)
si O est un point fixe dans R
2 →
r d OP
R d ( E / R) = ∫ 2
dm
E dt
R
donc
r d2 →
R d ( E / R ) = 2 OP dm
dt R
et
r d2 →
R d ( E / R ) = 2 m OG
dt R
soit
r r
R d ( E / R ) = mΓ ( G / R )
où m désigne la masse du système matériel E
G désigne le centre d’inertie du système matériel E.
r
5.2.2 CALCUL PRATIQUE DE R d ( E / R )
5.2.2.1 Le système matériel est constitué d’un seul solide S
r r
R d (S / R ) = mΓ (G / R )
5.2.2.2 Le système matériel est constitué de n solides Si
Par définition,
r r
R d ( E / R ) = ∫ Γ ( P / R )dm
E
d’où
r n r
R d ( E / R ) = ∑ ∫ Γ ( P / R )dm
i =1 Si
donc
r n r
R d ( E / R ) = ∑ R d (S i / R )
i =1
Page 21 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
soit
r n r
R d ( E / R) = ∑ m i Γ (G i / R )
i =1
où mi désigne la masse du solide Si
Gi désigne le centre d’inertie du solide Si
5.3 Calcul du moment dynamique, au point A, du système matériel E dans son
mouvement par rapport à R
5.3.1 LE SYSTEME MATERIEL EST CONSTITUE DE N SOLIDES SI
Par définition,
r → r
δ(A , E / R ) = ∫ AP∧ Γ ( P / R )dm
E
donc
r n → r
δ(A , E / R ) = ∑ ∫ AP ∧ Γ ( P / R )dm
i =1 Si
soit
r n r
δ (A , E / R ) = ∑ δ (A , S i / R)
i =1
r
où δ(A , S i / R ) désigne le moment dynamique, au point A, du solide Si dans son mouvement par rapport
à R.
5.3.2 LE SYSTEME MATERIEL EST CONSTITUE D’UN SEUL SOLIDE S
r
5.3.2.1 Calcul direct de δ(A , S / R )
r
Si P désigne un point courant de S et A désigne le point quelconque où est calculé δ(A , S / R ) .
Par définition,
r → r
δ(A , S / R ) = ∫ AP∧ Γ ( P / R )dm
S
donc
r → d r
δ(A , S / R ) = ∫ AP ∧ [V( P / R )] dm
dt R
S
Page 22 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
Sciences Indusrielles
CINETIQUE DES SYSTEMES MATERIELS
Cours
d’où
r d → r
δ(A , S / R ) = ∫ dt AP∧ V( P / R) dm
S R
→
d AP r
− ∫ dt ∧ V( P / R)dm
E R
et
r d → r
δ(A , S / R ) =
dt ∫ AP ∧ V( P / R dm
R
r S r r
− ∫ [V( P / R ) − V(A / R )] ∧ V( P / R )dm
S
donc
r d r r r
δ(A , S / R ) = [σ (A , S / R )]R + V(A / R ) ∧ ∫ V( P / R )dm
dt
S
soit
r d r r r
δ (A , S / R) = σ(A , S / R ) R
+ mV(A / R ) ∧ V(G / R )
dt
r
5.3.2.2 Calcul pratique de δ(A , S / R )
• S possède un point fixe A dans son mouvement par rapport à R
r d r
δ (A , S / R) = σ (A , S / R ) R
dt
• S ne possède pas de point fixe dans son mouvement par rapport à R
r d r
δ (G , S / R) = σ(G , S / R ) R
dt
r r → r
δ (A , S / R ) = δ(G , S / R ) + mAG ∧ Γ (G / R )
Page 23 Jacques AÏACHE – Jean-Marc CHÉREAU EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la
consultation individuelle et privée sont interdites.
You might also like
- 4 Apres Bac Sciences EcoDocument5 pages4 Apres Bac Sciences EcoAlaealeaNo ratings yet
- Corrigeons Notre FrançaisDocument2 pagesCorrigeons Notre FrançaisAlaealeaNo ratings yet
- Portrait-Robot Du Futur BachelierDocument8 pagesPortrait-Robot Du Futur BachelierAlaealeaNo ratings yet
- 05.1 - Cinématique Des Systèmes Matériels - TD1Document6 pages05.1 - Cinématique Des Systèmes Matériels - TD1AlaealeaNo ratings yet
- 04.1 - Modélisation Des Actions MécaniquesDocument19 pages04.1 - Modélisation Des Actions MécaniquesAlaealeaNo ratings yet
- Etude D'amenagement D'un Barra - BENZBIR Amine - 3072Document48 pagesEtude D'amenagement D'un Barra - BENZBIR Amine - 3072boutouilNo ratings yet
- Biologie Végétale - E-CoursDocument74 pagesBiologie Végétale - E-CoursAlaealeaNo ratings yet
- 01 - Lois GénéralesDocument12 pages01 - Lois GénéralesHoussam AssilaNo ratings yet
- Rapport Bernard Attali PolytechniqueDocument84 pagesRapport Bernard Attali PolytechniqueAlaealeaNo ratings yet
- 05 - Fonctions de Transfert - FiltrageDocument19 pages05 - Fonctions de Transfert - FiltrageAlaealeaNo ratings yet
- 04.1 TD N 1 Centre D Inertie Aire VolumeDocument9 pages04.1 TD N 1 Centre D Inertie Aire VolumeYahya Elamrani50% (2)
- 04.1 - TD N°2 Actions Mécaniques PDFDocument16 pages04.1 - TD N°2 Actions Mécaniques PDFAlaealeaNo ratings yet
- C Co Cri Ca PDFDocument16 pagesC Co Cri Ca PDFAlaealeaNo ratings yet
- TensionsEau PG v9Document9 pagesTensionsEau PG v9AlaealeaNo ratings yet
- Adjuvan 2Document7 pagesAdjuvan 2Youm WlilaNo ratings yet
- Les Systèmes Automatisés - Limites Du Modèle 1Document20 pagesLes Systèmes Automatisés - Limites Du Modèle 1sinchicovich0% (1)
- RapportDocument29 pagesRapportAlaealeaNo ratings yet
- Atlas-2015 FR PDFDocument84 pagesAtlas-2015 FR PDFOmar EL FakirNo ratings yet
- Les Systèmes Automatisés - Transformée de Laplace 2Document12 pagesLes Systèmes Automatisés - Transformée de Laplace 2sinchicovichNo ratings yet
- C Ex06 Ato CaDocument2 pagesC Ex06 Ato CaAlaealeaNo ratings yet
- 02.3 - Dérivée Vectorielle - TD1Document7 pages02.3 - Dérivée Vectorielle - TD1AlaealeaNo ratings yet
- Atomistique Et LewisDocument5 pagesAtomistique Et LewisSalahEddineSiragiNo ratings yet
- 02.4 - Outils Mathématiques Calcul Vectoriel PDFDocument11 pages02.4 - Outils Mathématiques Calcul Vectoriel PDFAlaealeaNo ratings yet
- Les Systèmes Automatisés - Limites Du Modèle 2 PDFDocument9 pagesLes Systèmes Automatisés - Limites Du Modèle 2 PDFAlaealeaNo ratings yet
- 02.1 - Liaisons Entre Solides D'un Mécanisme PDFDocument19 pages02.1 - Liaisons Entre Solides D'un Mécanisme PDFAlaealeaNo ratings yet
- Klubprepa 4738Document4 pagesKlubprepa 4738Mimita LafleurNo ratings yet
- Cinématique Des Systèmes - Cinématique Des Mécaniques PDFDocument16 pagesCinématique Des Systèmes - Cinématique Des Mécaniques PDFAlaealeaNo ratings yet
- 1er TD Signaux D'entrée Et de So PDFDocument2 pages1er TD Signaux D'entrée Et de So PDFAlaealeaNo ratings yet
- Cours Les Systèmes AutomatisésDocument10 pagesCours Les Systèmes AutomatisésAlaealeaNo ratings yet
- RunDocument168 pagesRunChloe ChooNo ratings yet
- 2bex 05 Complexes Cr3Fr AmmariDocument1 page2bex 05 Complexes Cr3Fr AmmariSanae SanonaNo ratings yet
- Rottion 1Document5 pagesRottion 1Mohsen ArfaouiNo ratings yet
- Fiche Cours CinematiqueDocument6 pagesFiche Cours CinematiqueOlivier FLOHR100% (2)
- Bonfiglioli - Renvoi D'angle RAN Doc ComplèteDocument26 pagesBonfiglioli - Renvoi D'angle RAN Doc Complètethierry.lambotte01No ratings yet
- 13 TD Corrigé - Géométrie Des Masses (Matrice D'inertie)Document8 pages13 TD Corrigé - Géométrie Des Masses (Matrice D'inertie)Salah Eddine Ait AissaNo ratings yet
- Physique MPSI 12312Document12 pagesPhysique MPSI 12312Serge DemirdjianNo ratings yet
- Corrigé 25 Janvier 2022contrôle Av Rat LP-TCBTP&3ER S3 Aut 2020 1avril 2021-3Document5 pagesCorrigé 25 Janvier 2022contrôle Av Rat LP-TCBTP&3ER S3 Aut 2020 1avril 2021-3Abdel Ilah El AzzabNo ratings yet
- TD20 CorrectionDocument6 pagesTD20 CorrectionHamza SadikNo ratings yet
- TP Physique Compte Rendu Force Centrifuge PDFDocument5 pagesTP Physique Compte Rendu Force Centrifuge PDFIk RamNo ratings yet
- p1 2s Mouvement Vitesse 2018Document2 pagesp1 2s Mouvement Vitesse 2018Yazine ZeidNo ratings yet
- Mouvement de Rotation D'un Corps SolideDocument34 pagesMouvement de Rotation D'un Corps SolidenourlalaNo ratings yet
- Moment CinétiqueDocument14 pagesMoment CinétiqueAlphaNo ratings yet
- Ely Math PDFDocument3 pagesEly Math PDFEly Mouhamedou100% (1)
- Sommets 2 ch06 Corrige 1562943506Document6 pagesSommets 2 ch06 Corrige 1562943506edieujuste20No ratings yet
- CM TransformationsDocument1 pageCM TransformationsdfghjNo ratings yet
- Preparation Concours2020 Cinetique FormulaireDocument7 pagesPreparation Concours2020 Cinetique FormulaireNowe AhmadeNo ratings yet
- Examen1 18 19Document2 pagesExamen1 18 19Mohamed BatrNo ratings yet
- Exercice Équation Mouvement Rotation Et RectiligneDocument4 pagesExercice Équation Mouvement Rotation Et Rectilignejulien skorkaNo ratings yet
- TD 3 Mécanique Du Point MatérielDocument7 pagesTD 3 Mécanique Du Point Matérielelmahdi.elkasmiNo ratings yet
- Ds 9Document6 pagesDs 9Amada HolmesNo ratings yet
- TD4 - Dynamique Du SolideDocument4 pagesTD4 - Dynamique Du SolideReda KabelNo ratings yet
- Exercice Sur Les MomentsDocument3 pagesExercice Sur Les MomentsDiagne100% (3)
- TP N3 Vib WiamDocument8 pagesTP N3 Vib WiamRania ChaabiNo ratings yet
- Roue de MaxwellDocument6 pagesRoue de MaxwellDjamel BoukredimiNo ratings yet
- Exm Solide en Ligne VFDocument3 pagesExm Solide en Ligne VFrba05525No ratings yet
- Cours - Vitesse Et RotationDocument20 pagesCours - Vitesse Et Rotationsanaà rhouzaliNo ratings yet
- TP 1: Outils Mathématiques Pour La Robotique de ManipulationDocument2 pagesTP 1: Outils Mathématiques Pour La Robotique de ManipulationSweat SweatNo ratings yet
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaNo ratings yet
- 6 Cours9 PDFDocument3 pages6 Cours9 PDFNahilNo ratings yet