You might also like
- Methods of Mathematical Modelling: Infectious DiseasesFrom EverandMethods of Mathematical Modelling: Infectious DiseasesHarendra SinghNo ratings yet
- Towards Integrated Digital Twins For Industrial PRDocument35 pagesTowards Integrated Digital Twins For Industrial PRđạt lê viết100% (1)
- EcdisDocument26 pagesEcdisMark Blancaflor100% (1)
- Critical Systems Validation: ©ian Sommerville 2004Document45 pagesCritical Systems Validation: ©ian Sommerville 2004Cecep Kurnia SastradiprajaNo ratings yet
- Digital Twin in GeneralDocument18 pagesDigital Twin in GeneralFabricio Rosado UrquhartNo ratings yet
- Automatic Id SystemDocument98 pagesAutomatic Id SystembillyboxerNo ratings yet
- DFDtutorialDocument30 pagesDFDtutorialsuntusha100% (1)
- Software Processes: ©ian Sommerville 2004 Slide 1Document50 pagesSoftware Processes: ©ian Sommerville 2004 Slide 1Cecep Kurnia SastradiprajaNo ratings yet
- Modeling and Simulation ITWG: Jürgen Lorenz - Fraunhofer IISB - Chairperson M&S ITWGDocument20 pagesModeling and Simulation ITWG: Jürgen Lorenz - Fraunhofer IISB - Chairperson M&S ITWGArun MehtaNo ratings yet
- DigitaltwindataDocument19 pagesDigitaltwindataMaimouna Coulibaly100% (1)
- Digital Twin MethodologyDocument6 pagesDigital Twin MethodologyRaddan Agimular100% (1)
- Guide To System Development March 2009Document10 pagesGuide To System Development March 2009Jorge Marcillo100% (1)
- Uiwang ICD - Republic of KoreaDocument29 pagesUiwang ICD - Republic of KoreaYe PhoneNo ratings yet
- Extreme ProgrammingDocument22 pagesExtreme ProgrammingJoseph ReyesNo ratings yet
- Energy Efficiency Measures in Shipping From Operation and Maintenance PerspectiveDocument32 pagesEnergy Efficiency Measures in Shipping From Operation and Maintenance PerspectiveMed Amine RessadNo ratings yet
- Q. What Does The Term AIS Mean?Document4 pagesQ. What Does The Term AIS Mean?Asus Fonepad100% (1)
- 3 Discrete Time SystemsDocument40 pages3 Discrete Time SystemsNur Razanah Mohd YasinNo ratings yet
- Energy BalancesDocument16 pagesEnergy BalancesEliot Kh100% (1)
- Heat Sterilization TechnologyDocument49 pagesHeat Sterilization TechnologyLeyvert De Jesus100% (1)
- Principal Ship Dimensions and Glossary of Terms.Document8 pagesPrincipal Ship Dimensions and Glossary of Terms.Ashok KumarNo ratings yet
- 172Document27 pages172Temesgen zenebe100% (1)
- Digital Twin For LogisticsDocument33 pagesDigital Twin For LogisticsKelompok 3A100% (1)
- Presentation On Digital TwinDocument15 pagesPresentation On Digital TwinAlif RuslanNo ratings yet
- Mathematical Modeling and Simulation Course DescriptionDocument62 pagesMathematical Modeling and Simulation Course DescriptionKhalil AhmedNo ratings yet
- Software Reuse: ©ian Sommerville 2004 Slide 1Document50 pagesSoftware Reuse: ©ian Sommerville 2004 Slide 1Cecep Kurnia SastradiprajaNo ratings yet
- 1 A Simulation Based Model For The BerthDocument9 pages1 A Simulation Based Model For The BerthMonu KumarNo ratings yet
- Chapter 1 (Part 2) : Basic Concepts 1.4 Process Variables: Marmy Roshaidah Mohd SallehDocument47 pagesChapter 1 (Part 2) : Basic Concepts 1.4 Process Variables: Marmy Roshaidah Mohd SallehAhmad Safwan HakimNo ratings yet
- Sematech APCDocument20 pagesSematech APCMark YamayoshiNo ratings yet
- Semiconductor TechnologiesDocument502 pagesSemiconductor TechnologiesQuan Le100% (1)
- ITTC - Recommended Procedures and Guidelines For Resistance Uncertainty AnalysisDocument18 pagesITTC - Recommended Procedures and Guidelines For Resistance Uncertainty AnalysisDaniel Vindex Kwabla DomehNo ratings yet
- Overview of Warehouse OptimizationDocument7 pagesOverview of Warehouse OptimizationHo Van RoiNo ratings yet
- The Functional Mockup InterfaceDocument24 pagesThe Functional Mockup InterfacevaneinsNo ratings yet
- Enterprise Digital TwinDocument3 pagesEnterprise Digital TwinContineo world100% (1)
- Ais 1Document8 pagesAis 1Julius Fernandies100% (1)
- Discrete Event SimulationDocument5 pagesDiscrete Event Simulationeng_refaatNo ratings yet
- Digital Twin - Mitigating Unpredictable, Undesirable Emergent Behavior in Complex SystemsDocument29 pagesDigital Twin - Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systemsjwpaprk1100% (1)
- Modeling and Simulation in EngineeringDocument15 pagesModeling and Simulation in EngineeringauhutNo ratings yet
- ITTC - Speed-Power Trials 75-04-01-011Document76 pagesITTC - Speed-Power Trials 75-04-01-011Rumen KishevNo ratings yet
- Software Engineering OverviewDocument7 pagesSoftware Engineering OverviewfreemanNo ratings yet
- Modelling and Simulation StepsDocument11 pagesModelling and Simulation StepsStephen Janseen DelaPeña Balo100% (2)
- 1-Plant Control Design Handbook 27LH2V v7 0 PDFDocument61 pages1-Plant Control Design Handbook 27LH2V v7 0 PDFAnonymous 43pDZuRNo ratings yet
- Modeling and Simulation in EngineeringDocument310 pagesModeling and Simulation in EngineeringAlexxsNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeDocument25 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeFATMIENo ratings yet
- Digital Twins at Work in Maritime and EnergyDocument7 pagesDigital Twins at Work in Maritime and Energyjwpaprk1No ratings yet
- Chapter 10 Etching - IDocument23 pagesChapter 10 Etching - IRahmadityaBagaskoroNo ratings yet
- Using Digital Twin Technology in Engineering EducaDocument9 pagesUsing Digital Twin Technology in Engineering EducaNamLE100% (1)
- Click: Interactive PDF - Instead of SCR Olling!Document19 pagesClick: Interactive PDF - Instead of SCR Olling!Mozzy Crazzy100% (1)
- Essence of ContainerizationDocument120 pagesEssence of Containerizationswapneel_kulkarniNo ratings yet
- Validation of Linear and Weakly Nonlinear Seakeeping CodesDocument17 pagesValidation of Linear and Weakly Nonlinear Seakeeping Codespraveench1888No ratings yet
- Digital Twin Technology Evolution Stages and Implementation Layers With Technology ElementsDocument12 pagesDigital Twin Technology Evolution Stages and Implementation Layers With Technology ElementsSramana Bhattacharya100% (1)
- Model and SimulationDocument50 pagesModel and Simulationduydb_56100% (1)
- Estimation of Added Resistance and Ship Speed Loss in A SeawayDocument12 pagesEstimation of Added Resistance and Ship Speed Loss in A SeawayJoaNo ratings yet
- Automatic Control The Hidden TechnologyDocument13 pagesAutomatic Control The Hidden Technologye-barbas6378No ratings yet
- 1 Process Dynamics and Control No1Document32 pages1 Process Dynamics and Control No1Ayushi100% (1)
- Simulating Complex Business Systems With Multi-Purpose Simulation ToolsDocument12 pagesSimulating Complex Business Systems With Multi-Purpose Simulation ToolsPaúl Alejandro RiveraNo ratings yet
- Smart Ports & Supply ChainsDocument116 pagesSmart Ports & Supply ChainsMoussa Menouar100% (1)
- Lectures IFDocument110 pagesLectures IFselavilizationNo ratings yet
- 4-20 Ma. Cálculo de Distancia MáximaDocument3 pages4-20 Ma. Cálculo de Distancia MáximaMarco Antonio Arroyo RiveraNo ratings yet
- CDocument146 pagesCPradeep NaikNo ratings yet
- Safe PLC Controller Implementation IEC 61131-3 Compliant Based On A Simple SAT Solver: Application To Manufacturing SystemsDocument9 pagesSafe PLC Controller Implementation IEC 61131-3 Compliant Based On A Simple SAT Solver: Application To Manufacturing SystemsselavilizationNo ratings yet
- Herbal Preparations How To MakeDocument5 pagesHerbal Preparations How To MakepaulxeNo ratings yet
- E-Commerce The Cutting Edge of BusinessDocument3 pagesE-Commerce The Cutting Edge of BusinessselavilizationNo ratings yet
- Fishing Knots Tying How To Tie A Knot Knotting PDFDocument4 pagesFishing Knots Tying How To Tie A Knot Knotting PDFJason PetersNo ratings yet
- ABB - 4 Biggest MistakesDocument7 pagesABB - 4 Biggest MistakesAnargha BhattacharyaNo ratings yet
- Drupal Modules and FeaturesDocument46 pagesDrupal Modules and FeaturesselavilizationNo ratings yet
- Medical - Wilderness Med KitDocument26 pagesMedical - Wilderness Med KitTravis JohnsonNo ratings yet
- Man DbaDocument109 pagesMan DbaselavilizationNo ratings yet
- A Quick Introduction To C++Document29 pagesA Quick Introduction To C++api-27048744No ratings yet
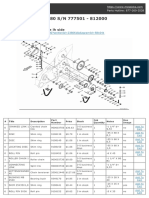
- Comprima V 150 / 180 S/N 777501 - 812000: VENDOR: Krone SECTION: Figure Listing DIAGRAM: 37.0 Chain Drive LH SideDocument3 pagesComprima V 150 / 180 S/N 777501 - 812000: VENDOR: Krone SECTION: Figure Listing DIAGRAM: 37.0 Chain Drive LH SideselavilizationNo ratings yet
- Welding Feasibility of Copper and Mild Steel Using TIG WeldingDocument3 pagesWelding Feasibility of Copper and Mild Steel Using TIG WeldingselavilizationNo ratings yet
- StructuredText PDFDocument5 pagesStructuredText PDFArmando RiveraNo ratings yet
- 32601872Document56 pages32601872selavilizationNo ratings yet
- Java TetrapackDocument72 pagesJava TetrapackselavilizationNo ratings yet
- Public Health Passenger Locator Form PDFDocument1 pagePublic Health Passenger Locator Form PDFselavilization100% (1)
- L2Document8 pagesL2selavilizationNo ratings yet
- A Dictionary of the Beja LanguageDocument162 pagesA Dictionary of the Beja LanguageselavilizationNo ratings yet
- Ashish Gandhe, Restaurant Recommendation System PDFDocument5 pagesAshish Gandhe, Restaurant Recommendation System PDFselavilizationNo ratings yet
- Farkas-Eternal EgyptDocument4 pagesFarkas-Eternal EgyptselavilizationNo ratings yet
- Adison Wongkar, Christoph Wertz, What Are People Saying About Net NeutralityDocument5 pagesAdison Wongkar, Christoph Wertz, What Are People Saying About Net NeutralityselavilizationNo ratings yet
- Grab A SiteDocument26 pagesGrab A SiteselavilizationNo ratings yet
- Andy Sun, Maisy Wieman, Analyzing Vocal Patterns To Determine EmotionDocument5 pagesAndy Sun, Maisy Wieman, Analyzing Vocal Patterns To Determine EmotionGoku MittalNo ratings yet
- Fangzhou Guo, Huaiyang Zhong, Yuchen Li, Learning To Predict Dental Caries For Preschool ChildrenDocument5 pagesFangzhou Guo, Huaiyang Zhong, Yuchen Li, Learning To Predict Dental Caries For Preschool ChildrenselavilizationNo ratings yet
- R. A. Hudson - A Dictionary of Beja (2012) PDFDocument162 pagesR. A. Hudson - A Dictionary of Beja (2012) PDFselavilizationNo ratings yet
- John Doherty, Predicting Mobile Users Future LocationDocument5 pagesJohn Doherty, Predicting Mobile Users Future LocationselavilizationNo ratings yet
- Abhimanyu Bannerjee, Asha Chigurupati, Identifying Gender From Facial Features PDFDocument5 pagesAbhimanyu Bannerjee, Asha Chigurupati, Identifying Gender From Facial Features PDFNaveen PasupuletiNo ratings yet
- Choosing the Right CS229 ProjectDocument5 pagesChoosing the Right CS229 ProjectselavilizationNo ratings yet
- Presentation On Power Grid InertiaDocument47 pagesPresentation On Power Grid InertiajorjijonNo ratings yet
- Chemical Equilibrium ExplainedDocument42 pagesChemical Equilibrium ExplainedDedi WahyudinNo ratings yet
- BS 2995-1966 PDFDocument15 pagesBS 2995-1966 PDF윤규섭No ratings yet
- Waterproof BoxDocument129 pagesWaterproof BoxVenkata Narayana BoddapatiNo ratings yet
- 1-Newton Second Law-ForMATDocument5 pages1-Newton Second Law-ForMATVAIBHAV KUMARNo ratings yet
- Design of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuDocument5 pagesDesign of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuVictor PassosNo ratings yet
- Problem #1: Session #19: Homework SolutionsDocument4 pagesProblem #1: Session #19: Homework SolutionsMD Abu RaselNo ratings yet
- CH 3Document19 pagesCH 3Abhishek GiriNo ratings yet
- Proportional Chopper Amplifier VB-3A: Min MaxDocument5 pagesProportional Chopper Amplifier VB-3A: Min MaxryujoniNo ratings yet
- Connective TissueDocument6 pagesConnective TissuecrtgyhujikNo ratings yet
- 3G Commands in EricssonDocument2 pages3G Commands in EricssonKeshav Singh0% (1)
- Earth and Life Science Test ReviewDocument3 pagesEarth and Life Science Test Reviewmerlyn m romerov100% (1)
- Hazardous Area Hazardous Area ClassificaDocument106 pagesHazardous Area Hazardous Area ClassificaHedi Ben MohamedNo ratings yet
- AC axial compact fan technical specificationsDocument5 pagesAC axial compact fan technical specificationsdhanasekhar27No ratings yet
- Solidworks Flow SimulationDocument7 pagesSolidworks Flow SimulationpatrickNX94200% (1)
- Mste 3.0 Plane Geometry Hand OutsDocument8 pagesMste 3.0 Plane Geometry Hand OutsJasmine MartinezNo ratings yet
- Ductile deformation finite strain analysisDocument27 pagesDuctile deformation finite strain analysisJorgeBarriosMurielNo ratings yet
- Unit 10 - Week 9: Assignment 9Document4 pagesUnit 10 - Week 9: Assignment 9shubhamNo ratings yet
- Connector Python En.a4Document98 pagesConnector Python En.a4victor carreiraNo ratings yet
- Oracle Database JDBC Developer Guide and ReferenceDocument432 pagesOracle Database JDBC Developer Guide and Referenceapi-25919427100% (1)
- Chemistry Sectionwise Analysis of PYQs (2024) - Ec3e53a7 c902 4e85 A5dd 12c4bf1f4ae7 1Document5 pagesChemistry Sectionwise Analysis of PYQs (2024) - Ec3e53a7 c902 4e85 A5dd 12c4bf1f4ae7 1lakhbhat2020No ratings yet
- JACOB ThirdDocument16 pagesJACOB ThirdWendell ReyesNo ratings yet
- Weld CheckDocument6 pagesWeld CheckArnold c ElverNo ratings yet
- Jurnal IlmiahDocument12 pagesJurnal IlmiahROSSITANo ratings yet
- Mathematics Class 10 CBSE (NCERT)Document369 pagesMathematics Class 10 CBSE (NCERT)LinoNo ratings yet
- Balmer PDFDocument3 pagesBalmer PDFVictor De Paula VilaNo ratings yet
- Ne7207 Nis Unit 2 Question BankDocument2 pagesNe7207 Nis Unit 2 Question BankalgatesgiriNo ratings yet
- Dental Material Final ReportDocument7 pagesDental Material Final ReportAbdullah Muhammed khaleel HassanNo ratings yet
- Lecture 01Document18 pagesLecture 01priyasonu049No ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityFrom EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (115)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- Building Server-side and Microservices with Go: Building Modern Backends and Microservices Using Go, Docker and KubernetesFrom EverandBuilding Server-side and Microservices with Go: Building Modern Backends and Microservices Using Go, Docker and KubernetesNo ratings yet
- Artificial Intelligence: Data Analytics and Innovation for BeginnersFrom EverandArtificial Intelligence: Data Analytics and Innovation for BeginnersRating: 5 out of 5 stars5/5 (3)
- Visions Of Technology: A Century Of Vital Debate About Machines Systems AFrom EverandVisions Of Technology: A Century Of Vital Debate About Machines Systems ARating: 4 out of 5 stars4/5 (9)
- Arduino: The ultimate guide to Arduino, including projects, programming tips & tricks, and much more!From EverandArduino: The ultimate guide to Arduino, including projects, programming tips & tricks, and much more!No ratings yet
- Modeling, Dynamics, and Control of Electrified VehiclesFrom EverandModeling, Dynamics, and Control of Electrified VehiclesRating: 5 out of 5 stars5/5 (1)