You might also like
- Lab 7 Pid ControlDocument6 pagesLab 7 Pid ControlFatin FarehahNo ratings yet
- Lab 7-CSDocument8 pagesLab 7-CSkashafNo ratings yet
- L10 PID Control DesignDocument10 pagesL10 PID Control Designalex carterNo ratings yet
- PracticalDocument10 pagesPracticalSec ArcNo ratings yet
- Process Dynamics and Control: BITS PilaniDocument30 pagesProcess Dynamics and Control: BITS PilaniShubham ChoudharyNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- CompensatorDocument69 pagesCompensatorKarthika KandasamyNo ratings yet
- ELEC4632 Lab 5 Notes 2022 T3Document9 pagesELEC4632 Lab 5 Notes 2022 T3wwwwwhfzzNo ratings yet
- Control PidDocument4 pagesControl PidronaldNo ratings yet
- PID Pole-Placement Controller Design and Tuning MethodsDocument16 pagesPID Pole-Placement Controller Design and Tuning MethodsFiras BackourNo ratings yet
- C and I Lab Manual - 1Document95 pagesC and I Lab Manual - 1iniyavan3119No ratings yet
- Activity 05Document17 pagesActivity 05Joshua AbadNo ratings yet
- Model Free ObserverDocument8 pagesModel Free Observer程崇律No ratings yet
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MNo ratings yet
- Low-Cost Microcontroller-Based Hover Control Design of A QuadcopterDocument7 pagesLow-Cost Microcontroller-Based Hover Control Design of A Quadcopternguyễn namNo ratings yet
- Elec4632 Lab 5 Notes 2023 t3Document9 pagesElec4632 Lab 5 Notes 2023 t3hiyomurrrNo ratings yet
- Feedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlDocument17 pagesFeedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlYvesExequielPascuaNo ratings yet
- Process ControlDocument26 pagesProcess ControlMeenaNo ratings yet
- Design and Implementation of Real Time IntegerDocument6 pagesDesign and Implementation of Real Time Integerडाँ सूर्यदेव चौधरीNo ratings yet
- PID Control Theory ExplainedDocument17 pagesPID Control Theory ExplainedRahim Ali QamarNo ratings yet
- PID Intech-Pid Control Theory PDFDocument18 pagesPID Intech-Pid Control Theory PDFDragoș TomaNo ratings yet
- KrishiDocument3 pagesKrishiKrishi ChhedaNo ratings yet
- Tuning Optimal PID Using PSODocument7 pagesTuning Optimal PID Using PSORajib BanerjeeNo ratings yet
- Pid Controller Without NoiseDocument10 pagesPid Controller Without NoisessleandroNo ratings yet
- 002-05344 AN205344 PI Theory in Motor ControlDocument8 pages002-05344 AN205344 PI Theory in Motor ControlEmadNo ratings yet
- Exp 5&6Document9 pagesExp 5&6AASHISH YADAVNo ratings yet
- PIDtutorialDocument13 pagesPIDtutorialalijnubyNo ratings yet
- Avr PDFDocument5 pagesAvr PDFbrmamorNo ratings yet
- Real - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationDocument10 pagesReal - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationmadanesherNo ratings yet
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocument7 pagesTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Proportional-Integral Controller Retuning To Improve Controller Performance in Formaldehyde Production Process at PT XDocument8 pagesProportional-Integral Controller Retuning To Improve Controller Performance in Formaldehyde Production Process at PT XDyah KuntiNo ratings yet
- Final AMCEEE ArticleDocument5 pagesFinal AMCEEE ArticleFatima HarfouchiNo ratings yet
- Temperature Control of Plastic Extrusion Barrel Using: FuzzyDocument6 pagesTemperature Control of Plastic Extrusion Barrel Using: FuzzyrfgdjiuyNo ratings yet
- Design of PID Controller For Boost Converter Using Particle Swarm Optimization AlgorithmDocument5 pagesDesign of PID Controller For Boost Converter Using Particle Swarm Optimization AlgorithmdanielzNo ratings yet
- Lab Experiment # 06: ObjectiveDocument2 pagesLab Experiment # 06: ObjectiveMuhammad Samee baigNo ratings yet
- Method FuzzyDocument6 pagesMethod FuzzyAlejandroHerreraGurideChileNo ratings yet
- PD Compensator Design for Robot Arm Position Control SystemDocument16 pagesPD Compensator Design for Robot Arm Position Control SystemMaitha SaeedNo ratings yet
- PID Controller Tuning Using "Ziegler-Nichols" TechniqueDocument5 pagesPID Controller Tuning Using "Ziegler-Nichols" Technique;(No ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- 15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller TuningDocument5 pages15 - Performances Comparison of The Bees Algorithm and Genetic Algorithm For PID Controller Tuningahmed.almohammedNo ratings yet
- PaperGasificador PedroAlegríaDocument5 pagesPaperGasificador PedroAlegríaPedroANo ratings yet
- Automatic PID Tuning: An Application Unfalsified' ControlDocument6 pagesAutomatic PID Tuning: An Application Unfalsified' ControlAndresAmayaNo ratings yet
- DC Motor Speed Control Using P, PI, PD and PID ControllersDocument7 pagesDC Motor Speed Control Using P, PI, PD and PID ControllersRohith YerrabachalaNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- Lee Et Al-1998-AIChE JournalDocument10 pagesLee Et Al-1998-AIChE JournalNoUrElhOdaNo ratings yet
- Computer Applications in Electrical Engineering Auto-Tuning With Fuzzy LogicDocument11 pagesComputer Applications in Electrical Engineering Auto-Tuning With Fuzzy Logicarjun232No ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument31 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsmelieneideaNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- TIME DOMAIN DESIGN OF CONTROL SYSTEMSDocument39 pagesTIME DOMAIN DESIGN OF CONTROL SYSTEMSZain AslamNo ratings yet
- 5_PIDDocument7 pages5_PIDKADUSKAR PALASHNo ratings yet
- Controller DesignDocument253 pagesController DesignymvbnNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Scattering Theory for Automorphic Functions. (AM-87), Volume 87From EverandScattering Theory for Automorphic Functions. (AM-87), Volume 87No ratings yet
- hw11 SolnDocument4 pageshw11 SolnQuốc Toàn HàNo ratings yet
- Bus Communication: Advantages and Disadvantages of Versatility and CostDocument5 pagesBus Communication: Advantages and Disadvantages of Versatility and CostNur Amiera SyuhadhaNo ratings yet
- Uploads-Question - Bank-Btech-5sem-It-Ca Faq PDFDocument6 pagesUploads-Question - Bank-Btech-5sem-It-Ca Faq PDFAfreensanaNo ratings yet
- VerilogDocument29 pagesVerilogUmamahesh MavuluriNo ratings yet
- Tutorial Chapter 5: MemoryDocument8 pagesTutorial Chapter 5: MemoryNur Amiera SyuhadhaNo ratings yet
- Chapter 2Document22 pagesChapter 2Anne DiasNo ratings yet
- Tutorial 2 Q1Q2AnswerDocument4 pagesTutorial 2 Q1Q2AnswerNur Amiera SyuhadhaNo ratings yet
- Discrete Dependent Variable Models: C 5 S A: L, N L, & PDocument35 pagesDiscrete Dependent Variable Models: C 5 S A: L, N L, & PNur Amiera SyuhadhaNo ratings yet
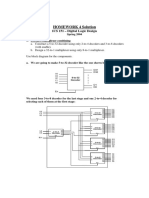
- HOMEWORK 4 Solution: ICS 151 - Digital Logic DesignDocument7 pagesHOMEWORK 4 Solution: ICS 151 - Digital Logic DesignNur Amiera SyuhadhaNo ratings yet
- Infix, Postfix, and Prefix QuizDocument2 pagesInfix, Postfix, and Prefix QuizNur Amiera SyuhadhaNo ratings yet
- Applied ElectromagneticsDocument269 pagesApplied ElectromagneticsNur Amiera SyuhadhaNo ratings yet
- (A) CU, ALU, Memory, Input, Output: Tutorial Chapter 1 and 2 (Answers) Q1Document5 pages(A) CU, ALU, Memory, Input, Output: Tutorial Chapter 1 and 2 (Answers) Q1Nur Amiera SyuhadhaNo ratings yet
- EE230x Hw#3 SolutionsDocument3 pagesEE230x Hw#3 SolutionsNur Amiera SyuhadhaNo ratings yet
- Complex Numbers in Rectangular and Polar Form: Yi Geometrically, We Use The Rectangular Coordinate SystemDocument3 pagesComplex Numbers in Rectangular and Polar Form: Yi Geometrically, We Use The Rectangular Coordinate SystemNur Amiera SyuhadhaNo ratings yet
- Kool 1999Document6 pagesKool 1999Nur Amiera SyuhadhaNo ratings yet
- Ethics For First Year Engineers The Struggle To Build A Solid FoundationDocument9 pagesEthics For First Year Engineers The Struggle To Build A Solid FoundationNur Amiera SyuhadhaNo ratings yet
- Analasys of AmplifiersDocument29 pagesAnalasys of AmplifiersSreenivas KotakondaNo ratings yet
- Digital Modulation TechniquesDocument22 pagesDigital Modulation TechniquesBiswajit MohantyNo ratings yet
- Guidelines of Occupational Safety and Health in Construction IndustryDocument74 pagesGuidelines of Occupational Safety and Health in Construction IndustryShaik MohamedNo ratings yet
- The Influence of Sensor-Based Intelligent Traffic Light Control ODocument95 pagesThe Influence of Sensor-Based Intelligent Traffic Light Control ONur Amiera SyuhadhaNo ratings yet
- Implementation of 1D CNN Array on FPGADocument4 pagesImplementation of 1D CNN Array on FPGANur Amiera SyuhadhaNo ratings yet
- Design 2Document1 pageDesign 2Nur Amiera SyuhadhaNo ratings yet
- Simple RC Trigger Circuit ExplainedDocument1 pageSimple RC Trigger Circuit ExplainedNur Amiera SyuhadhaNo ratings yet
- WebquestDocument3 pagesWebquestapi-501133650No ratings yet
- Tutorial 2 EOPDocument3 pagesTutorial 2 EOPammarNo ratings yet
- Best Practices For SAP-PM History DocumentationDocument8 pagesBest Practices For SAP-PM History DocumentationLaammeem Noon100% (1)
- Opening A New Company in Bangladesh (FAQ)Document12 pagesOpening A New Company in Bangladesh (FAQ)nomanpur100% (1)
- Conflict of Laws (Summary Paper)Document13 pagesConflict of Laws (Summary Paper)Anonymous CWcXthhZgxNo ratings yet
- Application For Freshman Admission - PDF UA & PDocument4 pagesApplication For Freshman Admission - PDF UA & PVanezza June DuranNo ratings yet
- 91 SOC Interview Question BankDocument3 pages91 SOC Interview Question Bankeswar kumarNo ratings yet
- RIE 2013 Dumping and AD DutiesDocument21 pagesRIE 2013 Dumping and AD Dutiessm jahedNo ratings yet
- Corephotonics Dual-Camera LawsuitDocument53 pagesCorephotonics Dual-Camera LawsuitMikey CampbellNo ratings yet
- BIM and AM to digitally transform critical water utility assetsDocument20 pagesBIM and AM to digitally transform critical water utility assetsJUAN EYAEL MEDRANO CARRILONo ratings yet
- Merging - Scaled - 1D - & - Trying - Different - CLassification - ML - Models - .Ipynb - ColaboratoryDocument16 pagesMerging - Scaled - 1D - & - Trying - Different - CLassification - ML - Models - .Ipynb - Colaboratorygirishcherry12100% (1)
- Steam Turbine and Governor (SimPowerSystems)Document5 pagesSteam Turbine and Governor (SimPowerSystems)hitmancuteadNo ratings yet
- Igbt Irg 4p254sDocument9 pagesIgbt Irg 4p254sMilagros Mendieta VegaNo ratings yet
- Cryptography Seminar - Types, Algorithms & AttacksDocument18 pagesCryptography Seminar - Types, Algorithms & AttacksHari HaranNo ratings yet
- New Markets For Smallholders in India - Exclusion, Policy and Mechanisms Author(s) - SUKHPAL SINGHDocument11 pagesNew Markets For Smallholders in India - Exclusion, Policy and Mechanisms Author(s) - SUKHPAL SINGHRegNo ratings yet
- KCC Strategic Plan 2020-2023Document103 pagesKCC Strategic Plan 2020-2023Kellogg Community CollegeNo ratings yet
- CXS 310-2013 - PomegranateDocument5 pagesCXS 310-2013 - PomegranateFranz DiazNo ratings yet
- Ganbare Douki Chan MALDocument5 pagesGanbare Douki Chan MALShivam AgnihotriNo ratings yet
- NSTP 1: Pre-AssessmentDocument3 pagesNSTP 1: Pre-AssessmentMaureen FloresNo ratings yet
- Banaue Rice Terraces - The Eighth WonderDocument2 pagesBanaue Rice Terraces - The Eighth Wonderokloy sanchezNo ratings yet
- Guideline 3 Building ActivitiesDocument25 pagesGuideline 3 Building ActivitiesCesarMartinezNo ratings yet
- BSC in EEE Full Syllabus (Credit+sylabus)Document50 pagesBSC in EEE Full Syllabus (Credit+sylabus)Sydur RahmanNo ratings yet
- Presenting India's Biggest NYE 2023 Destination PartyDocument14 pagesPresenting India's Biggest NYE 2023 Destination PartyJadhav RamakanthNo ratings yet
- Questions For ReviewDocument2 pagesQuestions For ReviewJoemar JavierNo ratings yet
- MA5616 V800R311C01 Configuration Guide 02Document741 pagesMA5616 V800R311C01 Configuration Guide 02Mário Sapucaia NetoNo ratings yet
- PSC Single SpanDocument99 pagesPSC Single SpanRaden Budi HermawanNo ratings yet
- Torta de Riso Business PlanDocument25 pagesTorta de Riso Business PlanSalty lNo ratings yet
- Microprocessor Based Systems: by Nasir Mahmood Nasir - Mahmood@seecs - Edu.pkDocument15 pagesMicroprocessor Based Systems: by Nasir Mahmood Nasir - Mahmood@seecs - Edu.pkMuhammad ZubairNo ratings yet
- Black Box Components and FunctionsDocument9 pagesBlack Box Components and FunctionsSaifNo ratings yet
- ZirakDocument4 pagesZiraktaibzirakchamkani81No ratings yet