You might also like
- Chapter 1 - Introduction To Process Plant Layout and Piping Design - IDC TechnologiesDocument10 pagesChapter 1 - Introduction To Process Plant Layout and Piping Design - IDC TechnologiesChemsys SunnyNo ratings yet
- Case Study 2 (Group 2)Document2 pagesCase Study 2 (Group 2)JivashiniBalasupurManiam0% (2)
- FERMENTATION Vinegar PDFDocument22 pagesFERMENTATION Vinegar PDFJivashiniBalasupurManiam100% (1)
- FERMENTATION Vinegar PDFDocument22 pagesFERMENTATION Vinegar PDFJivashiniBalasupurManiam100% (1)
- Chapter 5Document63 pagesChapter 5JivashiniBalasupurManiam100% (1)
- Robust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsFrom EverandRobust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsNo ratings yet
- Distributed Process Control ReportFrom EverandDistributed Process Control ReportNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- PDS OperatorStationDocument7 pagesPDS OperatorStationMisael Castillo CamachoNo ratings yet
- Chapter 11 - Sequential Function Chart - SFC - V2-1 PDFDocument16 pagesChapter 11 - Sequential Function Chart - SFC - V2-1 PDFRodrigoBurgosNo ratings yet
- Radar and Ultrasonic Level MeasurementDocument25 pagesRadar and Ultrasonic Level MeasurementPrashant ShahNo ratings yet
- SFC Introduction Guide R149-E1-01Document60 pagesSFC Introduction Guide R149-E1-01sukaryadi1No ratings yet
- Principles of Industrial Process Control - Text PDFDocument253 pagesPrinciples of Industrial Process Control - Text PDFMurali GangadharNo ratings yet
- Control Engineering April 12Document72 pagesControl Engineering April 12Mauro SánchezNo ratings yet
- Auto-Tuning Control Using Ziegler-NicholsDocument5 pagesAuto-Tuning Control Using Ziegler-NicholsValerian PopescuNo ratings yet
- Time Domain Reflectometry Theory: Application NoteDocument16 pagesTime Domain Reflectometry Theory: Application NoteyadamyugandharNo ratings yet
- TRICON Product Spec PDFDocument78 pagesTRICON Product Spec PDFUdaya Kumar Krishnan100% (1)
- Cascade Control TutorialDocument12 pagesCascade Control Tutorialpleco4me100% (1)
- PDS DeltaV DocLibraryDocument3 pagesPDS DeltaV DocLibrarygohviccNo ratings yet
- Final Control Element (Chp3)Document76 pagesFinal Control Element (Chp3)Muhamad RidzwanNo ratings yet
- Interface For RS3 IODocument48 pagesInterface For RS3 IOSaad BroNo ratings yet
- (Resources For Measurement and Control Series) Hughes, Thomas A - Programmable Controllers, Fourth Edition-IsA (2005)Document384 pages(Resources For Measurement and Control Series) Hughes, Thomas A - Programmable Controllers, Fourth Edition-IsA (2005)Abeng YogtaNo ratings yet
- Honeywell Experion System For Teaching Purposes: Year 2013Document60 pagesHoneywell Experion System For Teaching Purposes: Year 2013koushikNo ratings yet
- Smar FFDocument67 pagesSmar FFsina20795No ratings yet
- SIS - Safety Instrumented Systems - A Practical ViewDocument4 pagesSIS - Safety Instrumented Systems - A Practical ViewMugesh KannaNo ratings yet
- Function Block ProgrammingDocument180 pagesFunction Block ProgrammingSyed SaifuddinNo ratings yet
- Distributed Control System - OverviewDocument7 pagesDistributed Control System - OverviewGeorge MarkasNo ratings yet
- Fundamentals of Control SystemsDocument18 pagesFundamentals of Control SystemsShiva Sai BuraNo ratings yet
- EJ501 T3 PLC IntroductionDocument44 pagesEJ501 T3 PLC IntroductionLoga HSNo ratings yet
- Control System: Types of Industrial Control SystemsDocument19 pagesControl System: Types of Industrial Control SystemsAdnan Nawaz100% (2)
- Industrial Flow MeasurementDocument464 pagesIndustrial Flow Measurementfrgonzalezc100% (1)
- Modbus FAQDocument5 pagesModbus FAQspoof183No ratings yet
- DeltaVSISSafetyManual Dec08Document62 pagesDeltaVSISSafetyManual Dec08Mohamed Labib100% (1)
- Key Differences Between SCADA, DCS and HMI SystemsDocument3 pagesKey Differences Between SCADA, DCS and HMI SystemssgrsthNo ratings yet
- MTL IS Interfaces PDFDocument30 pagesMTL IS Interfaces PDFmasimeriseNo ratings yet
- User's Manual Rslogix 5000 PDFDocument218 pagesUser's Manual Rslogix 5000 PDFDennis Brenes RodríguezNo ratings yet
- DeviceNet TroubleshootingDocument15 pagesDeviceNet TroubleshootingBocefaloNo ratings yet
- HART DTM Library CertificateDocument2 pagesHART DTM Library Certificateraul salinas100% (1)
- Pid ControllersDocument132 pagesPid Controllers14071988No ratings yet
- en Level and Pressure Instrumentation For The Offshore IndustryDocument18 pagesen Level and Pressure Instrumentation For The Offshore IndustryerstendrainNo ratings yet
- Instrumentation Book 1Document280 pagesInstrumentation Book 1Abela DrrsNo ratings yet
- ICS OverviewDocument36 pagesICS Overviewisra marabahNo ratings yet
- Feedforward and Ratio Control: Isa Mentor Program Presentation By: Gregory K. McmillanDocument24 pagesFeedforward and Ratio Control: Isa Mentor Program Presentation By: Gregory K. McmillanJosé Diogo ForteNo ratings yet
- Training Kit PEK 408 EngDocument38 pagesTraining Kit PEK 408 EngSyed Mohammad NaveedNo ratings yet
- Meaning of Network TopologyDocument10 pagesMeaning of Network TopologyNardev KumarNo ratings yet
- Introduction To Fieldbuses For Process Control: Jonas BergeDocument40 pagesIntroduction To Fieldbuses For Process Control: Jonas BergeGonzalo Matias Monsalve MorenoNo ratings yet
- Control of Heat Recovery Steam GeneratorDocument5 pagesControl of Heat Recovery Steam Generatordrmsrmurty9473100% (5)
- Fisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareDocument24 pagesFisher Fieldvue Dvc6200F Digital Valve Controller PST Calibration and Testing Using Valvelink SoftwareKram Alim VillonNo ratings yet
- Digital PID ControllersDocument21 pagesDigital PID Controllerssopan saNo ratings yet
- Dcs-Scada An Introduction: Prof. Kapse C.DDocument42 pagesDcs-Scada An Introduction: Prof. Kapse C.DShivaji ThubeNo ratings yet
- Main Report DCSDocument26 pagesMain Report DCSjoymotiNo ratings yet
- CM44PDocument52 pagesCM44PSadot GutierrezNo ratings yet
- FDT - Field Device Tool PDFDocument8 pagesFDT - Field Device Tool PDFcalripkenNo ratings yet
- Role of SCADA in Hydro Power PlantDocument6 pagesRole of SCADA in Hydro Power PlantIndin HasanNo ratings yet
- FOUNDATION™ Fieldbus: Factory Acceptance Test and Device CommissioningDocument16 pagesFOUNDATION™ Fieldbus: Factory Acceptance Test and Device CommissioningNelson P. ColoNo ratings yet
- Chapter 1 PDFDocument45 pagesChapter 1 PDFDavid MartínezNo ratings yet
- 002-MHIAC - PPT - Presentation IEC-61131 3 StandardDocument47 pages002-MHIAC - PPT - Presentation IEC-61131 3 StandardEder JuárezNo ratings yet
- Technical Application Note 048Document11 pagesTechnical Application Note 048Demetri M. Scythe100% (1)
- Week 1 - Intro To Control SystemsDocument45 pagesWeek 1 - Intro To Control SystemsArkie BajaNo ratings yet
- Iec61131 3Document37 pagesIec61131 3spfallasNo ratings yet
- PLC Manual - 1803096 - Mayank Shahabadee - FINALDocument72 pagesPLC Manual - 1803096 - Mayank Shahabadee - FINALMayank Shahabadee67% (3)
- The Six - Fundamental Control Strategies PDFDocument48 pagesThe Six - Fundamental Control Strategies PDFAnonymous AsIbqUNo ratings yet
- Bioproduct Exp4 g1Document20 pagesBioproduct Exp4 g1JivashiniBalasupurManiamNo ratings yet
- Nano RobotDocument4 pagesNano RobotJivashiniBalasupurManiamNo ratings yet
- Exp 2 Head Loss Through FittingsDocument7 pagesExp 2 Head Loss Through FittingsJivashiniBalasupurManiamNo ratings yet
- Exp 2 Head Loss Through FittingsDocument9 pagesExp 2 Head Loss Through FittingsJivashiniBalasupurManiamNo ratings yet
- Fermentation 20190426132559Document22 pagesFermentation 20190426132559JivashiniBalasupurManiamNo ratings yet
- Exp 4 Osborne Reynolds DemonstrationDocument9 pagesExp 4 Osborne Reynolds DemonstrationJivashiniBalasupurManiamNo ratings yet
- Fermentation VinegarDocument4 pagesFermentation VinegarJivashiniBalasupurManiamNo ratings yet
- Chapter 4 - Time Value of Money PDFDocument57 pagesChapter 4 - Time Value of Money PDFJivashiniBalasupurManiamNo ratings yet
- Chapter 4 - Time Value of Money PDFDocument57 pagesChapter 4 - Time Value of Money PDFJivashiniBalasupurManiamNo ratings yet
- Analysis Exp 5Document2 pagesAnalysis Exp 5JivashiniBalasupurManiamNo ratings yet
- ConclusionDocument1 pageConclusionJivashiniBalasupurManiamNo ratings yet
- FermentationDocument1 pageFermentationJivashiniBalasupurManiamNo ratings yet
- Chapter 3.2 Liquid-Liquid ExtractionDocument9 pagesChapter 3.2 Liquid-Liquid ExtractionJivashiniBalasupurManiamNo ratings yet
- Chapter 5 HumidificationDocument22 pagesChapter 5 HumidificationJivashiniBalasupurManiamNo ratings yet
- Chemical Process: The Manufacture of Ammonia (The Haber Process)Document4 pagesChemical Process: The Manufacture of Ammonia (The Haber Process)JivashiniBalasupurManiamNo ratings yet
- English Journal Article AssignmentDocument7 pagesEnglish Journal Article AssignmentJivashiniBalasupurManiamNo ratings yet
- Exp 1 Concentric Tube Heat ExchangerDocument19 pagesExp 1 Concentric Tube Heat ExchangerMuhd Fadzli HadiNo ratings yet
- Extended ProcessDocument1 pageExtended ProcessJivashiniBalasupurManiamNo ratings yet
- 3 PoleDocument3 pages3 PoleSejahtra AbadiNo ratings yet
- Pump XJ - SeriesDocument36 pagesPump XJ - SeriesFERNANDA ANDRADENo ratings yet
- Dr. K. Lal Kishore: Registrar & Professor of Electronics & Commn. Engg.Document19 pagesDr. K. Lal Kishore: Registrar & Professor of Electronics & Commn. Engg.manpreetsingh3458417No ratings yet
- ZMP 60578 FM 11W 730 PDFDocument4 pagesZMP 60578 FM 11W 730 PDFtahseenahsanNo ratings yet
- Department of Electrical Engineering Electical & Electronics Measurement Question BankDocument4 pagesDepartment of Electrical Engineering Electical & Electronics Measurement Question Bankvijay patilNo ratings yet
- Programador AN589 MCROPICDocument8 pagesProgramador AN589 MCROPICJUANNo ratings yet
- SM Ami-208mc (E)Document18 pagesSM Ami-208mc (E)DanielaCostaNo ratings yet
- 8086 ProgramsDocument41 pages8086 ProgramsRakesh Kumar D73% (11)
- Onan YB GenManualDocument41 pagesOnan YB GenManualBentley WestfieldNo ratings yet
- Applications of PN Junction Diode PDFDocument8 pagesApplications of PN Junction Diode PDFZain Ul AbedinNo ratings yet
- Pulse Delay Ranging PDFDocument12 pagesPulse Delay Ranging PDFMilorad PavlovicNo ratings yet
- BTS Power Control R10Document17 pagesBTS Power Control R10Achmad SalsabilNo ratings yet
- Electrical Load ScheduleDocument55 pagesElectrical Load ScheduleLucky MalihanNo ratings yet
- Unit I: The Controlling Parameter Is Gate-Emitter VoltageDocument10 pagesUnit I: The Controlling Parameter Is Gate-Emitter VoltageRaj TilakNo ratings yet
- Plasma TV: Owner'S ManualDocument96 pagesPlasma TV: Owner'S ManualJuan gabriel Cepeda jimenezNo ratings yet
- Automatic Generation Control in A Deregulated Power SystemDocument6 pagesAutomatic Generation Control in A Deregulated Power SystemamaytaNo ratings yet
- Si4435BDY: Vishay SiliconixDocument6 pagesSi4435BDY: Vishay SiliconixaouhoudNo ratings yet
- Product Specifications: CharacteristicsDocument3 pagesProduct Specifications: Characteristicseslam salmonyNo ratings yet
- M060279-Deep Sea 5510 Insufficient Capacity Protection UpgradeDocument8 pagesM060279-Deep Sea 5510 Insufficient Capacity Protection UpgradelilyricardoseamanNo ratings yet
- SonoAce X8 v2.03.00-01 E PDFDocument476 pagesSonoAce X8 v2.03.00-01 E PDFDario BriceñoNo ratings yet
- Power Systems With MATLABDocument156 pagesPower Systems With MATLABJuan Alex Arequipa ChecaNo ratings yet
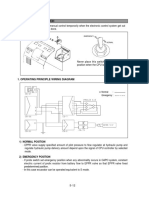
- Group 6 Prolix Switch: 1. Operating Principle Wiring DiagramDocument1 pageGroup 6 Prolix Switch: 1. Operating Principle Wiring DiagramDavidNo ratings yet
- Hardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Document16 pagesHardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Dmitriy SokolNo ratings yet
- Switching TechniquesDocument8 pagesSwitching Techniquesnak patNo ratings yet
- PixelNet Domain Control User ManualDocument251 pagesPixelNet Domain Control User ManualPedro MarquezNo ratings yet
- HP-AN243 - The Fundamentals of Signal AnalysisDocument68 pagesHP-AN243 - The Fundamentals of Signal Analysissirjole758483% (6)
- Sample Quiz4Document4 pagesSample Quiz4safNo ratings yet
- Capacitor Voltage TransformerDocument7 pagesCapacitor Voltage Transformerlkt_pestechNo ratings yet
- Mpms Combi Controller Fault CodesDocument4 pagesMpms Combi Controller Fault CodesFatih YÜKSELNo ratings yet
- Grundfosliterature 2838929Document120 pagesGrundfosliterature 2838929Dak SerikNo ratings yet