International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
Jaya Algorithm Based Automatic Generation
Control of Two Area Load Frequency Control with
Nonlinearities
Kavita Sharma1, Kapil Parikh2
1
M.tech Scholar Electrical Engineering SITE, Nathdwara, India
2
Assistant Professor Electrical Engineering SITE, Nathdwara, India
Abstract: In a complex power system, often two or more areas are interconnected to each other for having the mutual benefits of
peak load supply, reliability of supply, increase in reserve capacity and diversity factor etc. For a proper operation interconnected
powers system it is of utmost importance to have constant frequency and tie line power exchange. To manage the changes and
keeping record of it, in each area uses Automatic Generation control (AGC) is provided. The difference between the load side
demand and the generation at the moment is Area Control Error (ACE). The AGC in each area is carried out by a controller. In
the present piece of work to regulate AGC Proportional Integral Derivative (PID) controller is installed in each area. It is one of
the conventional methods. For enhancing the performance of controller in the past many optimization techniques have been
involved. To name some of it are, hybrid Firefly Algorithm and Pattern Search (hFA–PS) technique, Bacteria Foraging
Optimization Algorithm (BFOA), Genetic Algorithm (GA) and conventional Ziegler Nichols (ZN) which are separately based on
PI or PID controller.
The use of very new technique in this field has been made here which is JAYA algorithm. It is partly based on Artificial
Intelligence. To optimize the PID controller Integral Time multiply Absolute Error (ITAE) as objective function is utilized.
Under different loading conditions, system parameters of controller are changed to test its sensitivity. Also, it variation of time
constants for speed governor, turbine and tile line power were considered here under the Generation Rate Constraint(GRC)
values of ±0.05 and ±0.025. While performing all these analysis certain definite constraints are considered such as time delay,
reheat turbine, and GRC. The typical GRC for a thermal power plant lies between 2% and 5% per minute. Later it was
compared with the conventional and several other techniques to evaluate its performance particularly conventional ZN
controllers, GA PID controller and BFOA PID controller. The proposed system model has been developed using the platform
provided by the MATLAB/SIMULINK.
Keywords: Automatic Generation Control (AGC), Jaya Algorithm, Load frequency control, Sensitivity analysis, Two area system
I. INTRODUCTION
Power system is a vast network that has several ways to generate power. To have the maximum benefit of such a vast network these
power generation sources are usually connected to each other. Therefore, these are commonly termed as different areas that are
interconnected. To name some of the benefits from such a state of power system are reduces reserve capacity, reliability of
operation, supplying peak load, operation would be much cost effective and increase in diversity. The areas are interconnected via
tie line therefore, it is necessary to keep the tie line power and frequency of the interconnected areas at constant or scheduled values.
This is a very complex task. It requires continuous monitoring of the system. If the values deviate from the desired one than the
stable point of the operation will also deviates and it will affect the entire operation of tie line and area connected via it. Hence, a
system is needed to keep the track of these parameters of interconnected areas[1]. Automatic Generation Control (AGC) is the
system to satisfy the above mention needs of interconnected areas in power system. Like it was already mentioned, it will keep a
track of the generated power in the system it is connected in. It will keep the system update with the most recent load demand or the
demand by the any other area connected to area it is connected in. In short it observes the tie line power and frequency regularly. Its
working concept is quiet simple to understand. Each time a load demand changes, it see the present stats of the generating units of
the area for the amount of power generated and determines how much more power is needed to be generated. Or it could give
commands to one or two generating units to slow down in case there is decrease in load demand. The difference calculated between
the present generated power and the demand at the same time is known as Area Control Error (ACE). It includes the change in
frequency as well as tie line power too[5]. In the present context, the AGC is provided to maintain the frequency of areas at the
©IJRASET: All Rights are Reserved 383
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
same level whenever there is change. This type of AGC is called as Load Frequency Control (LFC). This problem has been
addressed several times in the past and still being addressed with the better solution each time. From traditional ways of controlling
via only simple controllers only like Proportional (P), Proportional Integral (PI) and Proportional Integral Derivative (PID) to
methods where these controllers are further modified to give better results[6]. The modification has been incorporated using many
optimization techniques such as Genetic Algorithm (GA), Neural Network (NN), fuzzy logic Genetic Algorithm (GA), Particle
swarm optimization (PSO) or Bacteria Foraging Optimization Algorithm (BFOA) etc. Also some recently used developed
optimization techniques too like hybrid Firefly Algorithm (FA) and Pattern Search (PS) or Teaching learning Based Optimization
Technique (TLBO). But the present work has taken very newly developed techniques inspired by TLBO named as JAYA Algorithm
(JA)[4]. The system which has been outlined as discussed so far has been developed and realized using the platform provided by the
MATLAB/SIMULINK. The two area non reheat interconnected system has been analyzed by utilizing this software tool with
different load conditions under variable system parameters.
II. SYSTEM MODELING
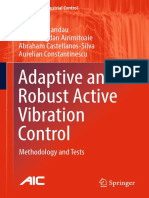
Fig.1 shows two area non reheat thermal power systems and their rating are 2000 MW (area-1 and area-2) with a nominal load of
1000 MW. Two area non-reheat thermal system is extensively used in the literature for design and investigation of automatic load
frequency control of interconnected areas [25]. Fig.1 shows different parameter classifies as B1& B2-frequency bias parameters;
ACE1 & ACE2 -area control errors; u1&u2 -control outputs from controller; R1 &R2 - governor speed regulation parameters(p.u.);
TG1 &TG2-speed governor time constants(seconds); ∆PV1 &∆PV2 -change in governor valve positions (p.u.); ∆PG1& ∆PG2 -
governor output command (p.u.); TT1 & TT2 - turbine time constant(seconds); ∆PT1 & ∆PT2 - change in turbine output powers;
∆PD1 & ∆PD2-load demand changes; ∆Ptie -incremental change in tie line power (p.u.); KP1 &KP2 -power system gains; TP1
&TP2 - power system time constant(seconds); T12 - synchronizing coefficient and ∆F1 &∆F2 -system frequency deviations(Hz).
The generation of power by Thermal power plants can be modified or changed at a specific maximum rate (2-5% per min) and this
is Generation Rate Constraint (GRC). Both areas of the power system consist of the speed governing system, turbine and generator.
Both areas have three inputs and two outputs. The inputs are the controller input ∆Pref (also denoted as u), load disturbance ∆PD
and tie-line power error ∆Ptie the outputs are the generator frequency ∆F and Area Control Error (ACE).
∆PD1
∆PG1
+ ACE1
_ ∆PT1 _
U1 ∆F1
α
∑ PID
Controller + ∑ ∑ + ∑
+
+ Controller Governor _ _ Power System
Turbine with GRC
∆P12
+
∆Ptie
∑
_
∆P21
+ ACE 2
∆PG2 ∆PT2 _ ∆F2
U2 α
∑ PID
Controller + ∑ + ∑ + ∑
+ _ _ _
Controller Power System
Turbine with GRC
∆PD2
Fig.1 Two area non-reheat thermal plant consideration of with GRC [1]
= ∆ +∆ (1)
where, B is the frequency bias parameters.
The turbine is represented by the transfer function
∆ ( )
( )= ( )
= (2) The transfer function of
∆
a governor is given in (2) as above.
∆ ( )
( )= ( )
= (3)
∆
The speed governing system has two inputs ∆Pref and ∆ with one output ∆PG(s) given as in (4),
∆ ( )=∆ ( )− ∆ ( ) (4)
The generator and load is represented by the transfer function
©IJRASET: All Rights are Reserved 384
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
( )= (5)
Where, KP=1/D and TP =2H/FD
The generator load system has two input ∆PT(s) and ∆PD(s) with one output ∆F(s) is specified by (6) and referred to [22],
∆ ( ) = ∆ ( )[∆ ( ) − ∆ ( )] (6)
III. JAYA ALGORITHM
A. Introduction
There are several algorithms for optimizing in case of different problems. These are mostly categorized as evolutionary based and
swarm intelligence based. Some of the examples are Genetic algorithm (GA), Differential Evolution (DE), Particle swarm
optimization (PSO), Ant Colony Optimization (ACO), Artificial Bee Colony (ABC), Fire Fly (FF) algorithm and many more like
these. The criterion for the optimization is to work with control parameters as these are probabilistic. Some algorithm like GA, DE
may use parameters more specific to terms of the algorithm i.e. algorithm specific parameters. Therefore, in case of such algorithm
it is important to tune the algorithm specific control parameters carefully. Any error in tuning would cause the computational work
to increase and may result in the local optimal solution. Taking account of this very point an algorithm that does not uses algorithm
specific parameters for control is developed for example it uses population size and generation number as the controlling
parameters. This algorithm was developed in 2011 and named as teaching learning-based optimization (TLBO). Development of
this algorithm has leaded the new algorithm which has only one phase of operation instead of two as in TLBO. Also, due to this it is
very simple. Its working is different form TLBO and is known as Jaya Algorithm (JA)[1]. Fig.2 shows the flow chart of Jaya
Algorithm.
B. Description
Let,,f(x)= objective function to be minimized
i= iteration
j= designed variables
m= number of designed variables (j=1, 2,…, m)
k= population size
n= number of candidate solution (k=1, 2…, n)
Fig.2: Flow chart of Jaya algorithm
©IJRASET: All Rights are Reserved 385
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
It assumed that there are two types of candidates exist i.e. best and worst where best candidates acquires the best value of f(x)
(f(x)b). On the other hand worst candidate acquire the worst value for f(x) (f(x)w) in the pool of whole solution of candidates.
Above is the flow chart description Jaya Algorithm. Where it has each and every step involved in the process of deciding optimal
solution from the given set of population.
Let it be ith iteration. Here, kth candidate
jth variable= Xj,k,i (value)
The above value of variable is modified as for ith iteration within [0,1],
, , = , , + , , , , − , , − ,, , , − , , (7)
where,
th
, , =Best candidate value of j variable
th
, , = Worst candidate value of j variable
, , = , , ‘s modified value
th
, , , , , = nay tow arbitrary number for j variables
, , , , − , , =represents inclination of solution towards best solution
− ,, , , − , , = represents affinity of solution to evade worst solution
If the , , has the better value than the , , , then it will be maintained and treated as the input to the next iteration.
The concept of above algorithm is very simple. As, in every iteration it will always tend to put effort to acquire the best solution
while getting away from the worst solution. Hence, it can be said that the algorithm will achieve victory on getting the best solution
which its name Jaya, Sanskrit word synonymous to victory[4].
C. Objective Function
The objective function, here for the designing of controller, there are certain criterions to follow. The criterion used here is the
Integral of Time multiplied Absolute Error (ITAE). It was observed that ITAE use in AGC is better option as an objective function.
J = ITAE = ∫ (|∆F | + |∆F | + |∆P |). t. dt (8)
Where,
∆F & ∆F = change in system frequency
∆P = Change in the power of tie line (increasing change), t = simulation time
While designing PID controllers it is restricted by certain constraints too. Hence, the given problem is expressed as,
For minimizing the function J, the following constraints bound it,
K ≤K ≤K ,K ≤K ≤K ,K ≤K ≤K (9)
IV. RESULT AND DISCUSSION
The systematic study with different cases as dynamic response analysis with SLP in area-1,area-2, area-1 and area-2 simultaneously
& sensitivity analysis with parameter variations for TG, TT, T12. The influence of the proposed JA based PID controller has been
verified by comparing the results with some newly published heuristic optimization techniques such as the BFOA, GA and
conventional ZN based PID controllers same kind of system. Table 1 shows value of different parameters of KP, Ki, Kd at different
algorithm as BFOA, GA, conventional ZN and JA at Generation rate constraint ± 0.05 & ± 0.025[26]
TABLE: 1
Controller parameters for different cases
Conventional GA PID BFOA PID JAYA PID Controller
Controller (ZN) Controller Controller GRC = ± 0.05 GRC = ± 0.025
Controller
Kp 0.5865 0.0955 0.1317 2.5279 0.001
parameters
Ki 0.51 0.4712 0.4873 0.8106 0.3381
Kd 0.1686 0.0679 0.2506 0.8741 0.2705
©IJRASET: All Rights are Reserved 386
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
A. Analysis of Results And Discussion
The proposed JA is compared with other conventional approaches suggested in and heuristic techniques such as ZN, GA and BFOA
as shown in table 2 from which it is clear that with same PID controller structure, the saturation limit (GRC = ±0.05), objective
function, least ITAE values is obtained with proposed JA (ITAE = 00.10617) compared to BFOA (ITAE = 0.4788), GA (ITAE =
0.5513) and ZN (ITAE = 0.6040) techniques. Hence, it can be concluded that the proposed Jaya algorithm better the conventional
ZN technique and heuristic techniques GA, BFOA as least objective function cost is obtained with the proposed Jaya algorithm.
Therefore, superior system performance in term of minm conditions least settling times in frequency and tie-line power deviations is
achieved with proposed Jaya optimized PID controller compared to others.
TABLE: 2
Settling time and error
GRC = ± 0.05 GRC = ± 0.025
Performance Performance
Techniques Settling time Ts (Sec.) Settling time Ts (Sec.)
indices indices
ΔF1 ΔF2 ΔPtie ITAE ΔF1 ΔF2 ΔPtie ITAE
Proposed JAYA 2.7 2.8 3.2 0.10617 5.3 3.7 7.1 0.462
BFOA 4.7 6.4 5.1 0.4788 9 7.9 8.3 1.5078
GA 6.9 8 5.7 0.5513 11.1 11.2 11 2.4668
ZN 8.1 9.2 6.7 0.604 15.3 14.1 15.3 3.4972
B. Dynamic Response Analysis
To understand the dynamic response of the system given below different Step Load Perturbation (SLP) and GRC values, the
subsequent cases are considered. Table-3 shows the controller parameters for different cases.
1) Case (i): Step load perturbation in area-1 with saturation limit (GRC = ±0.05)
Fig.3-5 show Frequency deviation of area-1, area-2, & tie line power deviation of 5% SLP applied in areas-1 at t=0 with
GRC=±0.05. It is clear from Fig. 3–5, the proposed Jaya algorithm optimized PID controller shows best dynamic performance
compared to ZN, GA, BFOA optimized PID controllers.
Fig.3 Frequency deviation of area-1for 5% SLP in area-1 with GRC=±0.05
Fig.4 Frequency deviation of area-2 for 5% SLP in area-1 with GRC=±0.05
©IJRASET: All Rights are Reserved 387
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
Fig.5 Tie line power deviation for 5% SLP in the area-1, with GRC=±0.05
2) Case (ii): Step load perturbation in area-1 and area-2 simultaneously with saturation limit (GRC = ±0.05)
Fig.6-8 show frequency deviation of area-1for 5% SLP in area-1 and 2% SLP in the area-2, at t=0 with GRC=±0.05. It is clear from
Fig. 6–8 that the designed controllers are emphatic and carry out satisfactory operation when we employ Jaya Algorithm and system
show less settling times compared to newly published ZN, GA and BFOA optimized PID controllers.
Fig.6 Frequency deviation of area-1for 5% SLP in area-1 and 2% SLP in area-2, with GRC=±0.05
Fig.7 Frequency deviation of area-2 for 5% SLP in area-1 and 2% SLP in area-2, with GRC=±0.05
Fig.8 Tie line power deviation of 5% SLP in area-1 and 2% SLP in area-2, with GRC=±0.05
©IJRASET: All Rights are Reserved 388
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
3) Case (iii): Step load perturbation in area-1 with saturation limit (GRC = ±0.025)
Fig.9 to11 show frequency deviation of area-1, area-2, tie line power deviation of 5% SLP applied in area-1 at t=0 with
GRC=±0.25. It can be seen from Fig. 9–11 that the proposed Jaya algorithm optimized PID controller gives superior dynamic
response having comparatively lesser peak overshoot and lesser settling times compared to newly published ZN, GA and BFOA
optimized PID controllers.
Fig.9 Frequency deviation of area-1 for 5% SLP in area-1, with GRC=±0.025
Fig.10 Frequency deviation of area-2 for 5% SLP in area-1, with GRC=±0.025
Fig.11 Tie line power deviation for 5% SLP in area-1, with GRC=±0.025
©IJRASET: All Rights are Reserved 389
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
4) Case (iv): Sensitivity analysis
Sensitivity analysis is carried out to study the power system due to large changes in the system parameters. Taking one at a time,
the parameter variation and time constants of speed governor, turbine, tie-line power is altered from their nominal values in the
value of +50% to -50% . Table 3 gives the tuned PID controller parameters under parameter variations of GRC is ± 0.05 and
±0.025. The Sensitivity analysis of parameter variations for Tg, Tt, T12 at different GRC of ± 0.05 and ±0.025 shows in table 4 and 5
respectively. It is obvious from Tables 4 and 5 that the dynamic performance with proposed Jaya algorithm tuned PID controller is
superior to BFOA optimized PID controller for every cases. Fig. 12 to 17 show various responses at parameter variations of Tg, Tt,
T12 increase 50%, with GRC=±0.05 and ±0.025. Hence, it can be concluded that the proposed control approach provides a strong
control under large changes in the system parameter variations.
TABLE : 3
Tuned PID controller parameters under parameter variation.
% GRC = ± 0.05 GRC = ± 0.025
Parameter Variation
Change KP KI KD KP KI KD
Nominal Loading
0 2.5279 0.8106 0.8741 0.001 0.3381 0.2705
Condition
50 10 0.7493 5.0889 1.00E-03 0.3183 0.2805
Tg
-50 4.739 0.8519 1.3795 1.00E-03 0.361 0.2491
50 9.7975 0.793 3.9953 1.00E-03 0.322 0.3182
Tt
-50 7.0147 0.7864 3.0209 0.001 0.3514 0.3007
50 4.7895 0.7317 2.6299 1.00E-03 0.3676 0.214
T12
-50 2.4739 0.8413 0.8631 0.0884 0.2993 0.3425
TABLE : 4
Sensitivity analysis with GRC = ± 0.05
Proposed JAYA Technique BFOA Technique
Parameter Variation % Change Settling Time (Sec.) Settling Time (Sec.)
ITAE ITAE
ΔF1 ΔF2 ΔPtie ΔF1 ΔF2 ΔPtie
Nominal Loading
0 2.7 2.8 3.2984 0.10617 4.7 6.4 5.1 0.4788
Condition
50 2.7 3.5 3.703 0.1155 4.8 6.8 5.5 0.476
Tg
-50 2.2 2.0 2.7605 0.1021 5.2 6.5 5.4 0.4843
50 2.6 3.1 3.3579 0.1079 5 7 5.6 0.4634
Tt
-50 2.1 3.2 3.2397 0.1073 5.2 6.2 5.1 0.4911
50 3.3 2.9 3.9567 0.1119 5.4 6.3 5.4 0.4771
T12
-50 3.3 3.7 3.9432 0.1632 2.2 6.9 5.6 0.5048
TABLE : 5
Sensitivity analysis with GRC = ± 0.025
Proposed JAYA Technique BFOA Technique
Parameter Variation % Change Settling Time (Sec.) Settling Time (Sec.)
ITAE ITAE
ΔF1 ΔF2 ΔPtie ΔF1 ΔF2 ΔPtie
Nominal Loading
0 5.3 3.7 7.1582 0.462 9 7.9 8.3 1.5078
Condition
50 5.5 4.6 8.1855 0.5002 7.9 7.4 9.2 1.7988
Tg
-50 5.2 3.7 6.1648 0.4319 9.4 8.1 8.7 1.3011
50 5.6 5.6 8.4516 0.5046 9.2 8.4 7.5 1.3957
Tt
-50 5.4 3.6 5.7189 0.4272 9.6 8.6 8.3 1.1458
50 4.9 4.7 8.5674 0.456 8 7.6 5.6 1.2758
T12
-50 5.9 5.8 6.9284 0.5074 11.1 8.2 10.2 2.1568
©IJRASET: All Rights are Reserved 390
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
Fig.12 Frequency deviation of area-1 due to increase for T12 by 50%, with GRC=±0.05
Fig.13 Frequency deviation of area-2 due to increase for Tg by 50%, with GRC=±0.05
Fig.14 Tie line power deviation due to increase for Tt by 50% ,with GRC=±0.05
Fig.15 Frequency deviation of area-1 due to increase for T12by 50% ,with GRC=±0.025
©IJRASET: All Rights are Reserved 391
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
Fig.16 Frequency deviation of area-2 due to increase for Tg by 50% ,with GRC=±0.025
Fig.17 Tie line power deviation due to increase for Tt by 50%, with GRC=±0.02
V. CONCLUSIONS
In this paper, Jaya Algorithm (JA) is applied to optimize PID controller parameters for two area non-reheat thermal power systems
with non linearity. It optimized the parameters of PID controller employing an ITAE objective function. The proposed JA based PID
controllers provided better performance compared to some already applied techniques such as Ziegler Nichols, Genetic Algorithm
and Bacterial Foraging Optimization Algorithms for the equal interconnected power system. Furthermore, the sensitivity analysis is
performed by varying the system parameters from their nominal values. It is observed that the proposed controller is robust for wide
range of system parameters variations from their nominal values.
REFERENCES
[1] Rabindra Kumar Sahu, Sidhartha Panda, and Saroj Padhan, A hybrid firefly algorithm and pattern search technique for automatic generation control of multi
area power systems Electrical Power and Energy Systems 2015;64: 9–23.
[2] Neha Modi, Manju Khare and Kanchan Chaturvedi.Performance analysis of load frequency control in single area power system using GA and PSO based PID
controller. International Journal of Electrical, Electronics 2013;2 :108-114.
[3] Kundur P. Power system stability and control. Tata McGraw Hill; 2009 [8th reprint].
[4] Rabindra Kumar Sahu, Sidhartha Panda, and Pratap Chandra Padhan , Design and analysis of hybrid firefly algorithm-pattern search based fuzzy PID controller
for LFC of multi area power systems, Electrical Power and Energy Systems 2015;69: 200–212.
[5] Nanda J, Mangla A, Suri S. Some findings on automatic generation control of an interconnected hydrothermal system with conventional controllers. IEEE
Trans Energy Conv 2006;21:187–93.
[6] Parmar KPS, Majhi S, Kothari DP. Load frequency control of a realistic power system with multi-source power generation. Int J Elect Power Energy Syst
2012;42:426–33.
[7] Ghoshal SP. Application of GA/GA–SA based fuzzy automatic generation control of a multi area thermal generating system. Electr Power Syst Res
2004;70:115–27.
[8] Gozde H, Taplamacioglu MC. Automatic generation control application with craziness based particle swarm optimization in a thermal power system. Int J Elect
Power Energy Syst 2011;33:8–16.
[9] Sahu RK, Panda S, Rout UK. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity.
Int J Elect Power Energy Syst 2013;49:19–33.
[10] Chandrakala KRMV, Balamurugan S, Sankaranarayanan K. Variable structure fuzzy gain scheduling based load frequency controller for multi source multi
area hydro thermal system. Int J Elect Power Energy Syst 2013;53:375–81.
[11] Saikia LC, Mishra S, Sinha N, Nanda J. Automatic generation control of a multi area hydrothermal system using reinforced learning neural network Controller.
Int J Elect Power Energy Syst 2011;33:1101–8.
©IJRASET: All Rights are Reserved 392
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue XII, Dec 2018- Available at www.ijraset.com
[12] Saikia LC, Nanda J, Mishra S. Performance comparison of several classical controllers in AGC for multi-area interconnected thermal system. Int J Electr Power
Energy Syst 2011;33:394–401.
[13] Nanda J, Mishra S, Saikia LC. Maiden application of bacterial foraging based optimization technique in multiarea automatic generation control. IEEE Trans
Power Syst 2009;24:602–9.
[14] Ali ES, Abd-Elazim SM. Bacteria foraging optimization algorithm based load frequency controller for interconnected power system. Int J Electr Power Energy
Syst 2011;33:633–8.
[15] Youssef L. Abdel and Magid M.A. Abido.AGC tuning of interconnected reheat thermal systems with particle swarm optimization.IEEE ICECS-2003.
[16] K.S.S. Ramakrishna and T.S. Bhatti .Load frequency control of interconnected hydro-thermal power systems. International Conference on Energy and
Environment, 2006.
[17] R.N. Patel, S.K. Sinha and R. Prasad.Design of a robust controller for AGC with combined intelligence techniques. International Science Index World
Academy of Science,Engineering and Technology 2008;2: 607-613.
[18] B. Venkata Prasanth and Dr. S.V. Jayaram Kumar.Load frequency control for a two area interconnected power system using robust genetic algorithm
controller.Journal of Theoretical and Applied Information Technology 2008; 3:1204-1212
[19] Dr. K. Rama Sudha, V.S.Vakula and R. Vijaya Shanthi.PSO based design of robust controller for two area load frequency control with
nonlinearities.International Journal of Engineering Science and Technology 2010; 2:1311-1324.
[20] Seyed Abbas Taher, Masoud Hajiakbari Fini and Saber Falahati Aliabadi.Fractional order PID controller design for LFC in electric power systems using
imperialist competitive algorithm. Ain Shams Engineering Journal 2014;5: 121-135.
[21] Azadani, H.N.Design of GA optimized fuzzy logic-based PID controller for the two area non-reheat thermal power system. IEEE Fuzzy Systems (IFSC), 13th
Iranian Conference on 2013; 1-6.
[22] Yogendra Arya and Narendra Kumar.Fuzzy Gain Scheduling Controllers for Automatic Generation Control of Two-area Interconnected Electrical Power
System. Electric Power Components and System 2016;1-15.
[23] R.Venkata Rao, Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems, International Journal of
Industrial Engineering Computations 2016; 7:19–34.
[24] E.S.AliS.M.Abd-Elazim, BFOA based design of PID controller for two area Load Frequency Control with nonlinearities Electrical Power and Energy Systems
2013;51: 224–231.
[25] Sugandh P. Singh, Tapan Prakash, V.P. Singh, and M. Ganesh Babu, Analytic hierarchy process based automatic generation control of multi-area
interconnected power system using Jaya algorithm Engineering Applications of Artificial Intelligence 2017;60: 35–44.
[26] E.S.AliS.M.Abd-Elazim, BFOA based design of PID controller for two area Load Frequency Control with nonlinearities Electrical Power and Energy Systems
2013;51: 224–231.
©IJRASET: All Rights are Reserved 393
You might also like
- 535 11910 1 PB PDFDocument12 pages535 11910 1 PB PDFAnonymous fHEEc2lx6No ratings yet
- A Hybrid Firefly Algorithm and Pattern Search Technique For Automatic SeeDocument15 pagesA Hybrid Firefly Algorithm and Pattern Search Technique For Automatic SeeMushtaq Najeeb AhmedNo ratings yet
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Document5 pagesFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837No ratings yet
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocument6 pagesLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- Load Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerDocument7 pagesLoad Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerBbbNo ratings yet
- Load Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerDocument4 pagesLoad Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerSudhir KumarNo ratings yet
- Optimal Load Frequency Control in A SingleDocument6 pagesOptimal Load Frequency Control in A SingleDr. Ulaganathan.M, AP /EEENo ratings yet
- Tuning of Pid Controller Used in Agc Scheme With Genetic AlgorithmsDocument6 pagesTuning of Pid Controller Used in Agc Scheme With Genetic Algorithmsjjm_8679641No ratings yet
- Ejaet 2 11 43 48Document6 pagesEjaet 2 11 43 48Mekonnen ShewaregaNo ratings yet
- Load Frequency Control Optimization Using PSO Based Integral ControllerDocument7 pagesLoad Frequency Control Optimization Using PSO Based Integral ControllerMekonnen ShewaregaNo ratings yet
- Automatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmDocument8 pagesAutomatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmseventhsensegroupNo ratings yet
- Design and Analysis of TID Controller For Load Frequency Control of Two-Area Interconnected Power SystemDocument5 pagesDesign and Analysis of TID Controller For Load Frequency Control of Two-Area Interconnected Power SystemGuru MishraNo ratings yet
- Automatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerDocument9 pagesAutomatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerHamsa DeepikaNo ratings yet
- An Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationDocument7 pagesAn Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationJamile_P_NNo ratings yet
- Fuzzy-PI Current Controlled D-STATCOMDocument11 pagesFuzzy-PI Current Controlled D-STATCOMByreddy C S ReddyNo ratings yet
- AGC For Multi AreaDocument5 pagesAGC For Multi AreachalaNo ratings yet
- Chapter 1Document46 pagesChapter 1Asish NandaNo ratings yet
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocument7 pagesSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieNo ratings yet
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocument8 pagesElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNo ratings yet
- Jsaer2014 01 02 55 63Document9 pagesJsaer2014 01 02 55 63jsaereditorNo ratings yet
- DynamicProjectArticle PDFDocument9 pagesDynamicProjectArticle PDFNeha JainNo ratings yet
- Ga NN PDFDocument5 pagesGa NN PDFBezawit TesfayeNo ratings yet
- Scaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiaDocument10 pagesScaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiagaviotasilvestreNo ratings yet
- Automatic Load Frequency Control of MultDocument5 pagesAutomatic Load Frequency Control of Multabata yohannesNo ratings yet
- A PI Controller Based On Gain-Scheduling For Synchronous GeneratorDocument11 pagesA PI Controller Based On Gain-Scheduling For Synchronous GeneratoratirinaNo ratings yet
- BTEC Unit 82 HND AerospaceDocument14 pagesBTEC Unit 82 HND AerospaceCraig JonesNo ratings yet
- Journal of Electrical EngineeringDocument16 pagesJournal of Electrical EngineeringkodandaramNo ratings yet
- 04 Comparacion Snº1Document7 pages04 Comparacion Snº1Americo Kenyu LuqueNo ratings yet
- Article1379931606 - Kumari and JhaDocument6 pagesArticle1379931606 - Kumari and JhaAlexSoteloNo ratings yet
- Position and Speed Optimization of ServoDocument9 pagesPosition and Speed Optimization of ServoteekamNo ratings yet
- Load Frequency Control of Two Area Power System Using Pid Controller IJERTV3IS110621Document6 pagesLoad Frequency Control of Two Area Power System Using Pid Controller IJERTV3IS110621Mukesh Kumar Behera100% (1)
- LFC Dereg BMDocument10 pagesLFC Dereg BMgtchsekharNo ratings yet
- PID Controller Using Rapid Control Prototyping TechniquesDocument11 pagesPID Controller Using Rapid Control Prototyping TechniquesAlay Camilo Lopez CastanoNo ratings yet
- Modern PID/FOPID Controllers For Frequency Regulation of Interconnected Power System by Considering Different Cost FunctionsDocument29 pagesModern PID/FOPID Controllers For Frequency Regulation of Interconnected Power System by Considering Different Cost FunctionsHemza SellamnaNo ratings yet
- PID Controlled Synchronous Motor For Power Factor CorrectionDocument5 pagesPID Controlled Synchronous Motor For Power Factor CorrectionigoreliasNo ratings yet
- Sizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDocument7 pagesSizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDizky Christian HadiNo ratings yet
- Comparative Analysis of Speed Control Techniques of DC Motors With MatlabDocument4 pagesComparative Analysis of Speed Control Techniques of DC Motors With Matlabsrinureddy2014No ratings yet
- Load Frequency Control For Interconnected Power System Using Different ControllersDocument5 pagesLoad Frequency Control For Interconnected Power System Using Different ControllersmahendraNo ratings yet
- Sizing of DG Unit Operated at Optimal Power Factor To Reduce Losses in Radial Distribution. A Case StudyDocument8 pagesSizing of DG Unit Operated at Optimal Power Factor To Reduce Losses in Radial Distribution. A Case StudyTensaie NegussieNo ratings yet
- Hardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADocument5 pagesHardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADr Tarakanath KobakuNo ratings yet
- Design of Fuzzy Logic ControllerDocument11 pagesDesign of Fuzzy Logic ControllerAmar IndraNo ratings yet
- Archive of SID: Dynamic Controllers Design For STATCOMDocument7 pagesArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanNo ratings yet
- Turbogenerator Self-Tuning Automatic Voltage RegulatorDocument6 pagesTurbogenerator Self-Tuning Automatic Voltage Regulatoranupam789No ratings yet
- Automatic Generation Control of Two-Area System Considering Non-LinearitiesDocument5 pagesAutomatic Generation Control of Two-Area System Considering Non-LinearitieserpublicationNo ratings yet
- 30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A ReviewDocument14 pages30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A Reviewiaset123No ratings yet
- Coordinated Control of Interconnected Microgrid and Energy Storage SystemDocument9 pagesCoordinated Control of Interconnected Microgrid and Energy Storage SystemAsar AloNo ratings yet
- Controller Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power SystemDocument9 pagesController Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power Systemiraj FarajiNo ratings yet
- Electrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotaDocument9 pagesElectrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotasunilkumareceNo ratings yet
- DC Motor Speed C BcontrolDocument6 pagesDC Motor Speed C BcontrolRoger RozarioNo ratings yet
- E3sconf SeFet2019 01012Document4 pagesE3sconf SeFet2019 01012dolaNo ratings yet
- E3sconf SeFet2019 01012 PDFDocument4 pagesE3sconf SeFet2019 01012 PDFdolaNo ratings yet
- Frequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated EnvironmentDocument10 pagesFrequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated Environmentyogi_sikarNo ratings yet
- Yük Frekans Makale PDFDocument6 pagesYük Frekans Makale PDFAnonymous CwsnlBNo ratings yet
- Fuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavDocument10 pagesFuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavLuis Andrew LumbreNo ratings yet
- Frequency-Bias Tie-Line Control of Hydroelectric Generating Stations For Long DistancesDocument5 pagesFrequency-Bias Tie-Line Control of Hydroelectric Generating Stations For Long DistancesShashank MandloiNo ratings yet
- Tuning of PID Controllers With Fuzzy Logic: AbstractDocument8 pagesTuning of PID Controllers With Fuzzy Logic: Abstractjames100% (1)
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- Paper 1Document7 pagesPaper 1Oscar Ruiz SerranoNo ratings yet
- Air Conditioning Heat Load Analysis of A CabinDocument9 pagesAir Conditioning Heat Load Analysis of A CabinIJRASETPublicationsNo ratings yet
- Advanced Wireless Multipurpose Mine Detection RobotDocument7 pagesAdvanced Wireless Multipurpose Mine Detection RobotIJRASETPublicationsNo ratings yet
- Controlled Hand Gestures Using Python and OpenCVDocument7 pagesControlled Hand Gestures Using Python and OpenCVIJRASETPublicationsNo ratings yet
- 11 V May 2023Document34 pages11 V May 2023IJRASETPublicationsNo ratings yet
- Design and Analysis of Components in Off-Road VehicleDocument23 pagesDesign and Analysis of Components in Off-Road VehicleIJRASETPublicationsNo ratings yet
- IoT-Based Smart Medicine DispenserDocument8 pagesIoT-Based Smart Medicine DispenserIJRASETPublications100% (1)
- Design and Analysis of Fixed-Segment Carrier at Carbon Thrust BearingDocument10 pagesDesign and Analysis of Fixed-Segment Carrier at Carbon Thrust BearingIJRASETPublicationsNo ratings yet
- Skill Verification System Using Blockchain SkillVioDocument6 pagesSkill Verification System Using Blockchain SkillVioIJRASETPublicationsNo ratings yet
- Real Time Human Body Posture Analysis Using Deep LearningDocument7 pagesReal Time Human Body Posture Analysis Using Deep LearningIJRASETPublications100% (1)
- BIM Data Analysis and Visualization WorkflowDocument7 pagesBIM Data Analysis and Visualization WorkflowIJRASETPublicationsNo ratings yet
- TNP Portal Using Web Development and Machine LearningDocument9 pagesTNP Portal Using Web Development and Machine LearningIJRASETPublicationsNo ratings yet
- Design and Analysis of Fixed Brake Caliper Using Additive ManufacturingDocument9 pagesDesign and Analysis of Fixed Brake Caliper Using Additive ManufacturingIJRASETPublicationsNo ratings yet
- A Review On Speech Emotion Classification Using Linear Predictive Coding and Neural NetworksDocument5 pagesA Review On Speech Emotion Classification Using Linear Predictive Coding and Neural NetworksIJRASETPublicationsNo ratings yet
- Comparative in Vivo Study On Quality Analysis On Bisacodyl of Different BrandsDocument17 pagesComparative in Vivo Study On Quality Analysis On Bisacodyl of Different BrandsIJRASETPublicationsNo ratings yet
- Skin Lesions Detection Using Deep Learning TechniquesDocument5 pagesSkin Lesions Detection Using Deep Learning TechniquesIJRASETPublicationsNo ratings yet
- Credit Card Fraud Detection Using Machine Learning and BlockchainDocument9 pagesCredit Card Fraud Detection Using Machine Learning and BlockchainIJRASETPublications100% (1)
- Low Cost Scada System For Micro IndustryDocument5 pagesLow Cost Scada System For Micro IndustryIJRASETPublicationsNo ratings yet
- Real-Time Video Violence Detection Using CNNDocument7 pagesReal-Time Video Violence Detection Using CNNIJRASETPublicationsNo ratings yet
- Literature Review For Study of Characteristics of Traffic FlowDocument10 pagesLiterature Review For Study of Characteristics of Traffic FlowIJRASETPublicationsNo ratings yet
- CryptoDrive A Decentralized Car Sharing SystemDocument9 pagesCryptoDrive A Decentralized Car Sharing SystemIJRASETPublications100% (1)
- A Blockchain and Edge-Computing-Based Secure Framework For Government Tender AllocationDocument10 pagesA Blockchain and Edge-Computing-Based Secure Framework For Government Tender AllocationIJRASETPublicationsNo ratings yet
- An Automatic Driver's Drowsiness Alert SystemDocument7 pagesAn Automatic Driver's Drowsiness Alert SystemIJRASETPublications100% (1)
- Experimental Study of Partial Replacement of Cement by Pozzolanic MaterialsDocument9 pagesExperimental Study of Partial Replacement of Cement by Pozzolanic MaterialsIJRASETPublicationsNo ratings yet
- Smart Video Surveillance Using YOLO Algorithm and OpenCVDocument8 pagesSmart Video Surveillance Using YOLO Algorithm and OpenCVIJRASETPublications100% (1)
- Structural Design of Underwater Drone Using Brushless DC MotorDocument9 pagesStructural Design of Underwater Drone Using Brushless DC MotorIJRASETPublicationsNo ratings yet
- Preparation of Herbal Hair DyeDocument12 pagesPreparation of Herbal Hair DyeIJRASETPublications100% (1)
- Vehicles Exhaust Smoke Detection and Location TrackingDocument8 pagesVehicles Exhaust Smoke Detection and Location TrackingIJRASETPublications100% (1)
- Design and Development of Cost-Effective 3D-PrinterDocument7 pagesDesign and Development of Cost-Effective 3D-PrinterIJRASETPublicationsNo ratings yet
- Achieving Maximum Power Point Tracking With Partial ShadingDocument10 pagesAchieving Maximum Power Point Tracking With Partial ShadingIJRASETPublicationsNo ratings yet
- Application For Road Accident RescueDocument18 pagesApplication For Road Accident RescueIJRASETPublications100% (1)
- NN Learning and Expert SystemsDocument8 pagesNN Learning and Expert SystemsZendoNo ratings yet
- Learn A Specific Technique Which Shows How (Usually The Controller Gain, K) in The S-DomainDocument23 pagesLearn A Specific Technique Which Shows How (Usually The Controller Gain, K) in The S-Domainahmed s. NourNo ratings yet
- Exponential Stabilization of A Wheeled Mobile Robot Via Discontinuous ControlDocument6 pagesExponential Stabilization of A Wheeled Mobile Robot Via Discontinuous ControlTwinkle TripathyNo ratings yet
- AFPGMI MSc-38-6Document31 pagesAFPGMI MSc-38-6nouman khanNo ratings yet
- Reliability Centered Maintenance (RCM)Document2 pagesReliability Centered Maintenance (RCM)Irshad AliNo ratings yet
- Synergetic ControlDocument13 pagesSynergetic Controlrostamkola1229No ratings yet
- AIFutureTestingeGuideTechWell 0 PDFDocument18 pagesAIFutureTestingeGuideTechWell 0 PDFPéter TóthNo ratings yet
- Test Plan ExampleDocument2 pagesTest Plan ExampleNgoc Han TruongNo ratings yet
- AGC Description Analysis IEEEDocument8 pagesAGC Description Analysis IEEEcastrojpNo ratings yet
- Reliability: Chapter 4 SupplementDocument10 pagesReliability: Chapter 4 Supplementrogean gullemNo ratings yet
- Operations Management: William J. StevensonDocument16 pagesOperations Management: William J. StevensonaprianNo ratings yet
- 2 PBDocument19 pages2 PBsitimudaNo ratings yet
- Loop ShapingDocument182 pagesLoop Shapingtasos7639No ratings yet
- Adaptive and Robust Active Vibration ControlDocument405 pagesAdaptive and Robust Active Vibration ControlThành ViếtNo ratings yet
- Landscape As A Geosystem ArtDocument33 pagesLandscape As A Geosystem ArtMARIA VICTORIA VELARDE ALIAGANo ratings yet
- CH 04Document21 pagesCH 04amanraaj100% (1)
- Lean and Agile Supply ChainDocument30 pagesLean and Agile Supply ChainboschabdelNo ratings yet
- Assignment 1Document34 pagesAssignment 1SAURAV kumarNo ratings yet
- Chapter 4 - SQADocument15 pagesChapter 4 - SQAsheilaabad8766No ratings yet
- HW Rest Part1Document5 pagesHW Rest Part1Anand SridharanNo ratings yet
- CH 69Document14 pagesCH 69Michael LangatNo ratings yet
- ControllersDocument10 pagesControllersShreyaskar SinghNo ratings yet
- 02 - The Software ProcessDocument36 pages02 - The Software Processkaosar alamNo ratings yet
- The MathWorks in The Automotive IndustryDocument2 pagesThe MathWorks in The Automotive IndustrymonisivaNo ratings yet
- 126 ThermoDynamics ThermoDynamicsDocument5 pages126 ThermoDynamics ThermoDynamicsmozam haqNo ratings yet
- Ic6703 Cs QBDocument25 pagesIc6703 Cs QBsunil1237No ratings yet
- Control Systems/Controllability and Observability: 1 System InteractionDocument5 pagesControl Systems/Controllability and Observability: 1 System InteractionPushpak JagtapNo ratings yet
- Open Loop and Closed Loop SystemsDocument3 pagesOpen Loop and Closed Loop SystemsGilbert Sigala0% (1)
- Chapter 7Document39 pagesChapter 7leo232No ratings yet
- Recolored Image Detection Via A Deep Discriminative Model: P.Yugandhar Sharma 1304-21-862-024Document67 pagesRecolored Image Detection Via A Deep Discriminative Model: P.Yugandhar Sharma 1304-21-862-024yugandhar sharmaNo ratings yet
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (81)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (122)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (5)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachFrom EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachRating: 4.5 out of 5 stars4.5/5 (27)